Механический КПД винтового механизма
Винтовой механизм (рис. 5.5) включает в себя винтовую кинематическую пару, образованную винтом 1 и гайкой 2. Он имеет постоянную передаточную функцию, которая по; Оптимальный угол подъема резьбы винта р, обеспечивающий максимальный КПД, можно найти, приравнивая нулю производнуюП = 0, р = 45с-ф/2. График изменения механического КПД винтового механизма при подъеме с коэффициентом трения/=0,1… Читать ещё >
Механический КПД винтового механизма (реферат, курсовая, диплом, контрольная)
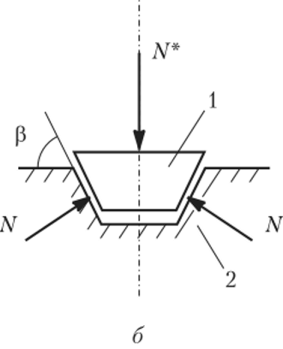
Рис. 5.3. Схема к расчету сил трения в поступательной кинематиче ской паре (а) и клиновой (б) парах:
1 — подвижное звено; 2 — стойка;
Р — угол наклона клина; N= -N* — нормальные реакции.

Действующий на цапфу диаметром d вала 1 момент сил трения Мф равен:
Винтовой механизм (рис. 5.5) включает в себя винтовую кинематическую пару, образованную винтом 1 и гайкой 2. Он имеет постоянную передаточную функцию, которая по;
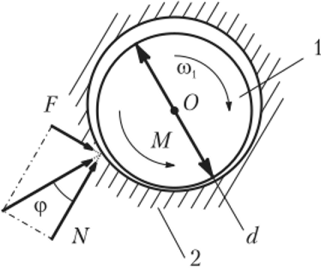
Рис. 5.4. Схема к расчету сил трения во вращательной кинематической паре:
1 — вал; 2 — подшипник (d — диаметр цапфы, Фт,> «Угол трения, Мф — момент трения) думается из рассмотрения движения за один оборот винта, при котором он перемещается на шаг Р. Рассматривая развертку винта, получим шаг: 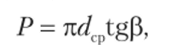
где р — угол наклона винтовой линии; dcp — средний диаметр резьбы.
Движение винта относительно гайки аналогично движению тела по наклонной плоскости, показанной на рис. 5.6. Если рассматривать равновесие винта, то реальная реакция R гайки на выделенный элемент ее будет отклонена от иде;
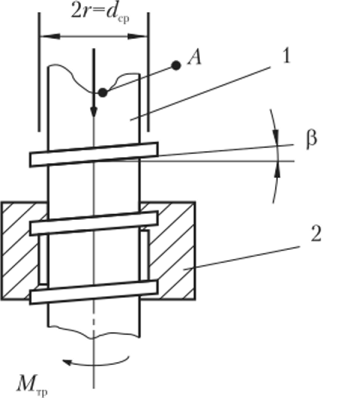
Рис. 5.5. Винтовая кинематическая пара:
dcp — средний диаметр резьбы; р — угол наклона винтовой линии альной реакции N, действующей по нормали, на угол трения (ртр = arctg / и от вертикальной оси винта на сумму углов Р + фтр. Связь реакции R с заданной осевой силой А полезного сопротивления может быть найдена из уравнения проекций сил на ось винта. При неподвижной гайке движение винта вызывается моментом, действующим в плоскости, перпендикулярной оси винта. При равномерном подъеме и отсутствии сил инерции этот движущий крутящий момент равен: 
где Т — тангенциальная сила, необходимая для движения по наклонной плоскости.
Векторное уравнение равновесия сил, действующих на винт, имеет вид: 
где R = N + Fiр — полная величина реакции с учетом сил трения FTp = fN. Из плана сил, построенного по приведенному выше векторному уравнению с учетом сил трения при подъеме нагруженного аксиальной силой А винта (рис. 5.6, а) следует:
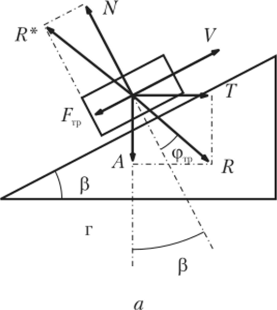
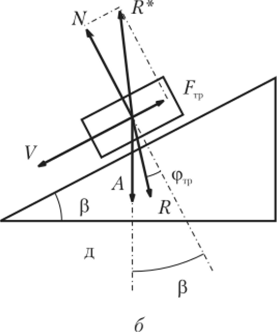
Рис. 5.6. Схема сил на наклонной плоскости при подъеме (а) и опускании (б) груза А.
При опускании винта и изменении направления сил трения (рис. 5.6 б) формула приобретает вид.
Следовательно, при расчете КПД винтового механизма потери на трение по винтовой поверхности можно учесть с помощью угла трения (р.ф, на который отклоняется реальная реакция R от идеальной реакции N, нормальной к винтовой поверхности контакта.
Крутящий момент, затрачиваемый на преодоление полезных и вредных сопротивлений, при подъеме полезного груза А винтового механизма с прямоугольной резьбой описывается формулой.

Значение момента, затраченного на преодоление сил полезного сопротивления подъему груза найдем, из приведенного выше выражения, полагая  коэффициент трения /= 0:
коэффициент трения /= 0:
Поскольку первая передаточная функция винтового механизма имеет постоянное значение, вторая передаточная функция, определяющая силы инерции при движении и тем самым динамические нагрузки, равна нулю; мгновенный и цикловой КПД при установившемся движении винтового механизма равны между собой и часто, его называют механическим КПД:

График изменения механического КПД винтового механизма при подъеме с коэффициентом трения/=0,1 показан на рис. 5.7.
Оптимальный угол подъема резьбы винта р, обеспечивающий максимальный КПД, можно найти, приравнивая нулю производнуюП = 0, р = 45с-ф/2.
d р При опускании груза механический КПД винтового механизма равен: 
Из последнего выражения очевидно, что при Р<�фтр расчетное значение КПД г|<0. Это свидетельствует о том, что возможная работа сил трения становится больше работы движущей аксиальной силы А. В данном случае опускание винта под действием аксиальной силы А становится невозможным. Такой механизм называется самотормозящим и часто используется в грузоподъемных механизмах для исключения самопроизвольного обратного движения груза вниз при выключении двигателя.