Условия разрешимости задачи синтеза
Рис. 10.2. Иллюстрация реализуемых равновесных состояний Реализуемым состоянием равновесия для данного объекта будет лишь то состояние, которое находится на этой поверхности. В другой точке пространства состояний его стабилизировать нельзя. Этот факт следует учитывать при формировании уравнений (10.4) и (10.5). Здесь х1 = (х, х2… х"_У — усеченный вектор состояния (без последней координаты… Читать ещё >
Условия разрешимости задачи синтеза (реферат, курсовая, диплом, контрольная)
Реализуемое состояние равновесия
Реализуемым состоянием равновесия будем называть такое состояние равновесия, в которое можно перевести систему с помощью конечного управляющего воздействия.
Рассмотрим, какие состояния равновесия будут реализуемыми для объекта (10.1). Для этого исходное уравнение представим в форме.

Здесь х1 = (х, х2… х"_У — усеченный вектор состояния (без последней координаты);/,() = С/,()Л () •••/"-.()У< Я’О = (ЬУ) &2() — К ()У ~ усеценные вектор-функции; bri(t, х) ^ О У (х е Qr, t); Qv — область допустимых значений переменных состояния.
Запишем для объекта (10.6) уравнения равновесного режима:

Из второго уравнения системы (10.7) определим управляющее воздействие:
и подставим его выражение в первое уравнение. Получим уравнение.

которое и описывает реализуемое равновесное состояние объекта (10.1). Отметим, что уравнение (10.8) задает в пространстве состояний поверхность ср (х) = 0 (п — 1)-го порядка (рис. 10.2).
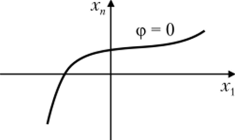
Рис. 10.2. Иллюстрация реализуемых равновесных состояний Реализуемым состоянием равновесия для данного объекта будет лишь то состояние, которое находится на этой поверхности. В другой точке пространства состояний его стабилизировать нельзя. Этот факт следует учитывать при формировании уравнений (10.4) и (10.5).
Пример 10.2. Определить множество реализуемых равновесных состояний для объекта, математическая модель имеет вид.
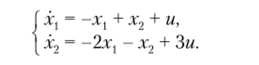
Решение.
Запишем уравнения статики: 
Определим управляющее воздействие из первого уравнения:
и подставим его выражение во второе уравнение. После преобразования получим уравнение множества реализуемых равновесных состояний в виде.
Как видим, графической интерпретацией этого множества в пространстве состояний является прямая. Стабилизировать объект управления в другой точке нельзя.