Синтез устойчивого скользящего движения
Допустим, что в этом законе выбраны такие коэффициенты 7 что характеристическое уравнение системы (8.12) при таком законе управления имеет один произвольный корень Л°, а остальные корни имеют отрицательную вещественную часть. Тогда, положив Л° = = ста (п) и приравняв 7j коэффициенту при Xj в эквивалентном управлении (8.29), с учетом условия (8.20в) получим. Имеет корни Если 7 принимает… Читать ещё >
Синтез устойчивого скользящего движения (реферат, курсовая, диплом, контрольная)
Рассмотрим, как на основе доказанной теоремы синтезировать закон управления СПС (8.12), (8.19), при котором обеспечивается асимптотически устойчивое скользящее движение. Так как условия скольжения рассматриваемой системы включают равенство (8.20в), то эквивалентное управление (8.26) принимает вид 
Этот закон управления зависит от первых к фазовых координат Xj (j = 1,2,…,/:). Рассмотрим закон управления.

Допустим, что в этом законе выбраны такие коэффициенты 7 что характеристическое уравнение системы (8.12) при таком законе управления имеет один произвольный корень Л°, а остальные корни имеют отрицательную вещественную часть. Тогда, положив Л° = = ста (п) и приравняв 7j коэффициенту при Xj в эквивалентном управлении (8.29), с учетом условия (8.20в) получим.
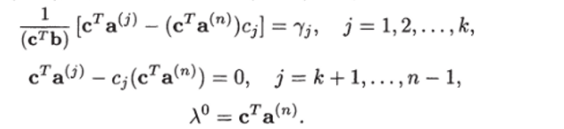
Эту систему можно преобразовать к виду.

Очевидно, если из этой системы определить постоянные Cj (j = = 1,2,…, п — 1), то получим поверхность скольжения.
Итак, из изложенного выше вытекает следующий порядок синтеза асимптотически устойчивого скользящего движения.
1) На основе заданного уравнения объекта выбрать закон управ;
к-1.
ления и = - 7jXj, при котором все корни характеристического.
;=i.
уравнения замкнутой системы, кроме одного, имеют отрицательную вещественную часть.
2) Решив систему уравнений (8.30), найти коэффициенты Cj (j =
= 1,2,…, n — 1).
3) Постоянные aj и 0j {j = 1,2,…,/:) в законе управления (8.19) установить такими, чтобы выполнялись соотношения (8.20а) и (8.206) в условии скольжения.
Решение задачи первого этапа тем проще, чем больше к. Однако чем больше к, тем сложнее реализация закона управления (8.19). Сложность решения задачи первого этапа при малых к обусловлена тем, что при выборе эквивалентного управления, кроме обеспечения требований к устойчивости и качеству скользящего движения, нужно позаботиться о том, чтобы система уравнений (8.30) была разрешима.
Как отмечалось, при к = п — 1 на с7 (j = 1,2,…, п — 1) никаких ограничений не накладывается. Поэтому в этом случае при синтезе эквивалентного управления нужно исходить только из требований к устойчивости и качеству скользящего режима.
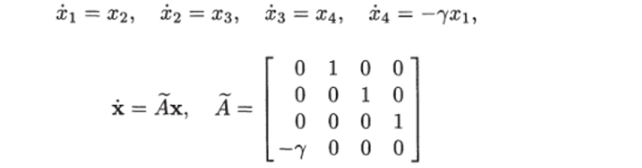
Пример 8.5. СПС описывается уравнениями.

где 6и определяется соотношением (8.196). Требуется установить, существует ли плоскость скольжения.

на которой скользящее движение является асимптотически устойчивым.
Решение. В данном случае в качестве эквивалентного управления можно принять ti = —7*1, и уравнение замкнутой системы принимает вид.
Корнями характеристического уравнения или.

Выбором 7 нельзя обеспечить требование, чтобы три корня имели отрицательную вещественную часть. Следовательно, не существует плоскости скольжения, по которой скользящее движение было асимптотически устойчиво.
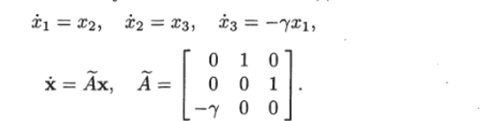
Пример 8.6. СПС описывается уравнениями.

где 6и определяется соотношением (8.196). Требуется установить, существует ли плоскость скольжения.

на которой скользящее движение является асимптотически устойчивым, и определить эту плоскость, если она существует.
или Решение. В качестве эквивалентного управления принимаем и = -7×1. Уравнение замкнутой системы имеет вид.
Характеристическое уравнение.

имеет корни Если 7 принимает отрицательное значение, то один вещественный корень будет положительным, два комплексно-сопряженных корня будут иметь отрицательную вещественную часть. Так что в данном случае можно выбрать плоскость скольжения, на которой скользящее движение будет асимптотически устойчивым. Найдем эту плоскость.
Если уравнение объекта записать в векторной форме, то матрица Л и вектор b имеют вид.
Система (8.30) принимает вид.

Так как столбцы матрицы А имеют вид  то из последних соотношений получаем
то из последних соотношений получаем  Отсюда находим.
Отсюда находим.

Напомним, что коэффициент 7 должен быть отрицательным. Параметры, а и 0 должны удовлетворять неравенствам (см. (8.20а) и (8.206)) а ^ «С1С2 = 7 и 0 ^ -С1С2 = 7.
Если выполняются условия скольжения и скользящее движение асимптотически устойчиво, то для того чтобы система с переменной структурой была асимптотически устойчива, необходимо и достаточно, чтобы изображающая точка из произвольноц точки фазового пространства попала на плоскость скольжения. Условия, при выполнении которых изображающая точка из произвольной точки попадает на плоскость скольжения, называются условиями попадания [56].
Пусть скользящее движение системы с переменной структурой (8.12), (8.19) асимптотически устойчиво. Так как на плоскости s = стх = 0 возникает скользящее движение, выполняются условия скольжения (8.20). Если изображающая точка не находится на плоскости переключения, то до попадания изображающей точки на эту плоскость знак функции переключения s = стх не изменяется, и функция 6и в законе управления (8.19) остается постоянной и принимает значение <$о или —2к линейных структур, которые описываются уравнениями.

где Ai (/ = 1,2,…, 2к) — матрицы, которые описывают структуры замкнутой системы, получающейся при подстановке управления (8.19) в уравнение объекта (8.12). При этом принимает определенные значения: ol{ или /3 $.
Каждая из структур определяется одной из матриц Л/ (/ = 1,2,… …, 2fc), и ее движения описываются уравнением (8.31). Фазовое пространство Rn разбивается на 2к областей, в каждой из которых движение СПС описывается уравнением одной из структур. Область, в которой движение СПС описывается уравнением данной структуры, называют областью определения этой структуры.
Теорема 8.2 (достаточное условие попадания [56]). Если выполняется условие скольжения (8.20), то для того чтобы изображающая точка СПС (8.12), (8.19) попала на плоскость скольжения s = стх = 0 (cn = 1), достаточно, чтобы выполнялось условие

где а(п* — п-й столбец матрицы А.
Доказательство. Производная по времени функций переключения 8 = стх в силу уравнений (8.12), (8.19) при подстановке п— 1.
хп = s — cjxj принимает вид j=1.

Допустим, что имеет место неравенство s (x (0)) > 0. Тогда до попадания изображающей точки на поверхность переключения s (x) > > 0. И так как выполняются условия (8.20), (8.32) и в силу (8.196) имеет место равенство (сТЬ)до = |(сгЬ)$о|, то производная отрицательна и удовлетворяет неравенству s < — |(стЬ)<5о|- Следовательно, изображающая точка попадет на плоскость скольжения за конечное время. Теорема доказана.
Здесь f (t) — возмущение.
Рассмотрим СПС, которая описывается уравнениями.
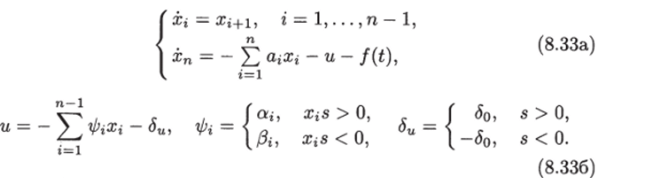
(8.336).
Приведем без доказательства достаточное условие попадания изображающей точки системы (8.33) на плоскость скольжения.
Теорема 8.3 [56]. Если коэффициенты Ci (i = 1,2,…, тг — 1) функции переключения s = сТх (сп = 1) положительны, то для того чтобы изображающая точка попала на плоскость 5 = 0, достаточно, чтобы характеристическое уравнение системы при = а* (г = 1,2,…, п — 1) не имело положительных вещественных корней и выполнялись условия
