Регулирование коэффициента мощности синхронного двигателя
Синхронные компенсаторы используют для «улучшения» коэффициента мощности и стабилизации напряжения промышленных сетей. Мощности синхронных компенсаторов достигают 100—160 Мвар. Изменение тока статора и его фазы при изменении тока возбуждения двигателя можно показать, построив векторные диаграммы (рис. 4.11.1), так же, как это было сделано для генератора. Зависимость тока статора от тока ротора… Читать ещё >
Регулирование коэффициента мощности синхронного двигателя (реферат, курсовая, диплом, контрольная)
Постоянство напряжения сети, от которой работает синхронный двигатель, обусловливает постоянство в нем результирующего потокосцепления. Поэтому регулирование тока возбуждения ротора при М = const приводит к изменению значения тока статора двигателя и его фазы (см. параграф 4.7). Таким образом, коэффициент мощности синхронных двигателей можно регулировать, что является их важной особенностью.
Изменение тока статора и его фазы при изменении тока возбуждения двигателя можно показать, построив векторные диаграммы (рис. 4.11.1), так же, как это было сделано для генератора.

Рис. 4.11.1. Векторные диаграммы синхронного двигателя при регулировании гока возбуждения.

Рис. 4.11.2. V-образные характеристики синхронного двигателя.
На угловых характеристиках (см. рис. 4.10.1) отмечены точки 1, 2,3, соответствующие трем векторным диаграммам на рис. 4.11.1.
Зависимость тока статора от тока ротора при заданном моменте па вату синхронного двигателя представляют V-образные характеристики (рис. 4.11.2).
Перевозбужденный двигатель работает с опережающей реактивной составляющей тока (см. рис. 4.11.1), недовозбужденный — с отстающей. На V-образных характеристиках (см. рис. 4.11.2) отмечены точки 1,2,3, соответствующие тем же точкам на угловых характеристиках (см. рис. 4.10.1).
На рис. 4.11.3 приведены три V-образные характеристики для разных значений момента на валу, полученные на компьютерной модели синхронного двигателя (см. параграф 5.2). Каждая из V-образных характеристик получена путем изменения тока ротора при постоянном значении момента на валу.
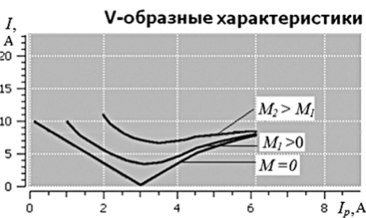
Рис. 4.113. V-образные характеристики синхронного двигателя (Модель).
Обычно синхронные двигатели работают с перевозбуждением при coscp = 0,8. При этом емкостные составляющие токов статора компенсируют в линии индуктивные составляющие токов асинхронных двигателей, трансформаторов и других индуктивных приемников, уменьшая токи и потери энергии в линиях.
Перевозбужденный синхронный двигатель, работающий без нагрузки на валу, называется синхронным компенсатором — потребителем емкостного тока. Векторная диаграмма компенсатора дана на рис. 4.11.4.
Синхронные компенсаторы используют для «улучшения» коэффициента мощности и стабилизации напряжения промышленных сетей. Мощности синхронных компенсаторов достигают 100—160 Мвар.
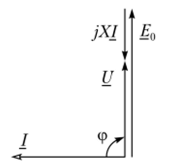
Рис. 4.11.4. Векторная диаграмма синхронного компенсатора
Задание 4.11.1. В цехе установлено несколько трехфазных асинхронных двигателей. Их общие параметры: cosip = 0,6 (инд); Рпш = 124 кВт; 1/шш = 380 В. Предполагается увеличить активную мощность приводов в 1,8 раза, но так, чтобы ток в линии увеличился не более чем на 20%. Для этого установлен синхронный двигатель со следующими номинальным и данными: Ршт =100 кВт; UHOM = = 380 В; coscp = 0,8 (емк).
Определить коэффициент мощности и ток в линии до и после установки синхронного двигателя.
Решение
1. Определим мощности всех асинхронных двигателей и ток до установки синхронного двигателя.
Реактивная мощность.

Полная мощность Ток.
Коэффициент мощности cosip = 0,6.
2. Реактивная мощность синхронного двигателя.

3. После установки синхронного двигателя получаем следующие значения. Общая активная мощность.

Общая реактивная мощность 
Общая полная мощность.

Ток в линии (общий ток).

Ток увеличился всего на 17%.
Коэффициент мощности.
Установка синхронного двигателя привела к «улучшению» коэффициента мощности.