Передаточная функция в системе регулирования по управлению и возмущению
Величина с (/) = E (s) называется полной ошибкой воспроизведения управляющего воздействия. Отсюда Умножим числитель и знаменатель дробей правой части уравнения ЬШ ^)'. Рис. 1.27. Структурная схема стабилизатора частоты оборотов вала двигателя. Аналогичное правило по нахождению передаточной функции по возмущению. Передаточная функция замкнутой системы по управляющему воздействию. Передаточная… Читать ещё >
Передаточная функция в системе регулирования по управлению и возмущению (реферат, курсовая, диплом, контрольная)
Задача системы — максимально усиливать управляющий сигнал и максимально подавлять возмущающий.
Рассмотрим замкнутую систему регулирования, которую условно разобьем на регулятор и объект регулирования. Тогда структурная схема может быть представлена (рис. 1.25).
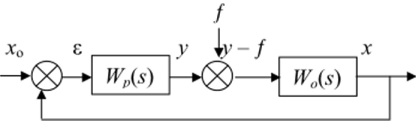
Рис. 1.25. Структурная схема замкнутой системы регулирования: х0-управляющее воздействие: / - возмущающее воздействие; х — регулируемая величина.
Передаточная функция регулятора:

передаточная функция объекта регулирования:

Необходимо найти X (s), исключив промежуточное значение у. Дифференциальные уравнения в операторной форме: для регулятора: 
для объекта: 
Исключим промежуточную величину укоординату регулятора):  Значение у подставим в уравнение (1.77):
Значение у подставим в уравнение (1.77):

Преобразуем:

Обозначим: D (p) = D0(p)Dp(p), К (р) = Ко(р)Кр(р) и перейдем к изображению:

Проведем преобразования:

отсюда Умножим числитель и знаменатель дробей правой части уравнения ЬШ ^)'.
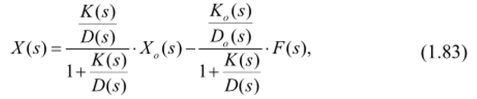

Это и есть передаточная функция разомкнутой системы.
Уравнение (1.83) запишем в виде.
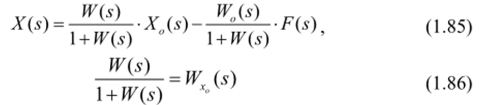
— передаточная функция замкнутой системы по управляющему воздействию.
Аналогично:

— передаточная функция замкнутой системы по возмущающему воздействию.
И окончательно:

Отсюда правило нахождения передаточной функции замкнутой системы по управлению: возмущающее воздействие приравнивается к нулю и находится отношение изображения выходной величины к изображению входной.
Аналогичное правило по нахождению передаточной функции по возмущению.
Уравнение (1.88) составлено для координаты х. Во многих случаях удобнее составлять уравнение для ошибки е = х0-х, х = х0-е, следовательно, X(5) = X0(s) — E (s). E (s) ?(/), т. е. E (s) — изображение от оригинала c (t). Подставим X (s) в уравнение (1.81): 

Величина с (/) = E (s) называется полной ошибкой воспроизведения управляющего воздействия.
отсюда Величина с (/) =-!—XJs) называется собственной ошибкой.
с 1+ IV (s)
воспроизведения системы. Она определяется структурой системы, ее параметрами, т. е. зависит от вида передаточной функции ошибки.
1 + W (s) И ВИДа УпРавляющего воздействия X0(t).
W (5).
Величина sAt)=—-—F (s) — ошибка воспроизведения систе;
3 1 + W (s)
мы, вызванная возмущающим воздействием, зависит от структуры системы и от вида нагрузки.
Пример. Найти передаточную функцию разомкнутой и замкнутой системы по схеме стабилизации частоты оборотов вала двигателя (см. рис. 1.4). Структурная схема показана на рис. 1.26.
На схеме у — коэффициент отрицательной обратной связи по скорости (остальные обозначения — см. рис. 1.4).
При нахождении передаточной функции разомкнутой системы управляющий и возмущающий сигналы приравнивают нулю. Затем разрывают цепь главной ООС и в месте разрыва (точки «а» и «б») одну величину берут за входную, а другую — за выходную и находят:

Это и есть передаточная функция разомкнутой системы; в охватываемую часть вошли первые пять звеньев.
Далее поступают так. Разрыв устраняется, и для нахождения W"(s) возмущающий сигнал приравнивается нулю, передаточная функция находится между точками Uq и со:
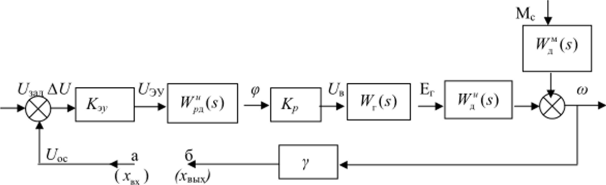
Рис. 1.26. Структурная схема стабилизатора частоты оборотов вала двигателя (астатической системы регулирования).

Аналогично находится передаточная функция замкнутой системы по возмущению. При этом управляющий сигнал приравнивается нулю, и система рассматривается между точками Мс и со:

Здесь 1 — передаточная функция сумматора.
И схема может быть представлена в виде, приведенном на рис. 1.27.
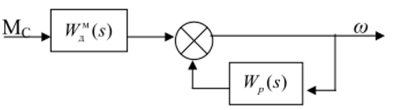
Рис. 1.27. Структурная схема стабилизатора частоты оборотов вала двигателя.
Передаточная функция разомкнутой системы используется для исследования устойчивости системы, замкнутой — для исследования статических характеристик и качества регулирования.