Расчет точности линейных систем автоматического управления при случайных воздействиях
Пример 1.4. На входе следящей САУ с единичной обратной связью действует сумма случайных задающего и возмущающего воздействий. Спектральные плотности задающего сигнала и возмущения известны: Где An — значение главного определителя Гурвица, составленного из коэффициентов а0, …, ап;М совпадает с главным определителем Гурвица, в котором первая строка заменена на Ъ0, Ьь …, Ьп_х. Где Wzx (p… Читать ещё >
Расчет точности линейных систем автоматического управления при случайных воздействиях (реферат, курсовая, диплом, контрольная)
Точность работы САУ при случайных воздействиях определяют в установившемся режиме по средней квадратической ошибке системы управления.
Рассмотрим замкнутую систему автоматического управления (рис. 1.17), на которую действует задающее воздействие лг (0 и возмущение (помеха)/(f), приложенная в произвольной точке системы. В зависимости от характера задающих и возмущающих воздействий возможны два основных и варианта при расчете точности САУ. Первый из них основан на предположении, что задающее воздействие x (t) — детерминированная функция времени, а возмущающее воздействий /(f) — стационарная случайная функция времени с известными статистическими характеристиками. При этом динамическая ошибка от задающего воздействия — регулярная величина и определяется по известной методике, например с помощью метода коэффициентов ошибок, а ошибка от возмущения — статистическими методами.
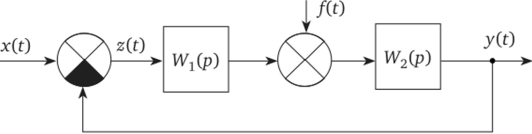
Рис. 1.17. К определению ошибки в САУ.
При втором варианте предполагается, что задающее воздействия и возмущение — случайные функции времени. Ошибка z (t), которая определяет точность работы САУ, также является случайной функцией; для ее расчета необходимо применение статистических методов.
Задающее и возмущающее воздействия, ошибку воспроизведения можно представить в виде суммы их математических и ожиданий и центрированных случайных функций:
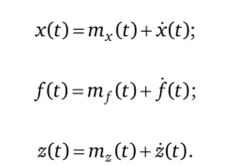
Так как система является линейной, то ошибка z (f) будет состоять из суммы составляющих ошибок от задающего воздействия zA.(t) и возмущения Zy (t):
Эти составляющие ошибок соответственно называют ошибкой от задающего воздействия или от полезного сигнала и ошибкой от возмущения или флуктуационной ошибкой. Математические ожидания задающего воздействия и помехи можно рассматривать как регулярные функции времени. Поэтому изображение ошибки, вызванной неслучайными составляющими задающего воздействия и возмущения, равно.

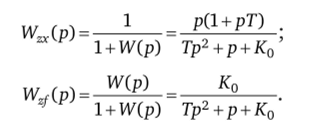
где Wzx(p) — передаточная функция системы относительно ошибки по задающему воздействию x (t); И^/р) — передаточная функция системы относительно ошибки по возмущающему воздействию ДО.
Для случая, изображенного на рис. 1.17, эти передаточные функции определяются следующим образом:
Математическое ожидание ошибки m2(t) называют систематической ошибкой. Центрированную составляющую ошибки z (t) называют случайной ошибкой. Установившееся значение ошибки вызванной неслучайной составляющей, определяется на основании методов исследования САУ при детерминированных воздействиях. Для вычисления ошибок, обусловленных случайными составляющими, необходимо знание средних значений и дисперсий этих сигналов. Средняя квадратическая ошибка САУ.
где D2(t) — дисперсия ошибки.
Значение средней квадратической ошибки может быть найдено посредством интегрирования по всем частотам спектральной плотности ошибки или через корреляционную функцию ошибки z (t);
При m2(t) = 0 имеет место соотношение.

Значение спектральной плотности ошибки Sz(co) согласно (1.20) может быть найдено из следующего соотношения:

Если воздействия x (t) и /(t) независимы, то последние два слагаемых в выражении для S2((o) равны нулю.
Расчет средней квадратической ошибки Dz (1.21) можно провести или приближенным способом — путем графического интегрирования кривой S2(co) или аналитически [13].
Аналитический метод определения средней квадратической ошибки разработан для САУ, когда подынтегральная функция S2(co) является дробно-рациональной функцией от со:
где.

С учетом этих соотношений вычисление средней квадратической ошибки можно свести к вычислению интеграла.

В общем случае при любом п для устойчивой САУ интеграл Jn вычисляется с помощью теории вычетов и представляет собой функцию коэффициентов полиномов G ()a> и H (jco) [15, 16]: 
где An — значение главного определителя Гурвица, составленного из коэффициентов а0, …, ап;М совпадает с главным определителем Гурвица, в котором первая строка заменена на Ъ0, Ьь …, Ьп_х.
В литературе по теории автоматического управления (ТАУ) имеются таблицы значений стандартных интегралов Jn в виде формул, зависящих от коэффициентов а0, …, ап и Ь0, Ьь …, Ьп_х для значений п от 1 до 7.
Ниже приведены примеры расчетов средней квадратической ошибки для некоторых САУ.
Пример 1.4. На входе следящей САУ с единичной обратной связью действует сумма случайных задающего и возмущающего воздействий. Спектральные плотности задающего сигнала и возмущения известны:

Найти среднюю квадратическую ошибку системы, если ее передаточная функция в разомкнутом состоянии.
Предполагается, что задающий сигнал x (t) и возмущение/(t) являются статистически независимыми.
Решение. Найдем передаточные функции ошибки от задающего и возмущающего сигналов W2V(p) и У/г)-(р):
В соответствии с выражением (1.22) определяем спектральную плотность ошибки: 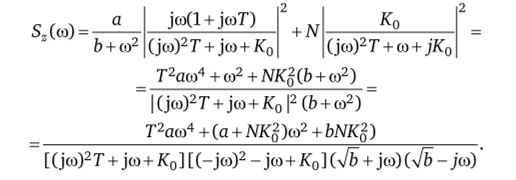
На основании полученной S,(co) подынтегральные функции G (jco) и H (joj) выражения (1.23):
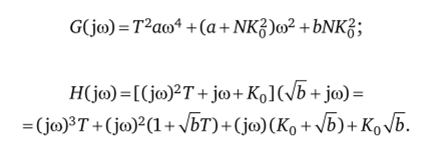
Отсюда находим коэффициенты а" Ъ} в полиномах G (jco) и Н ()ш):
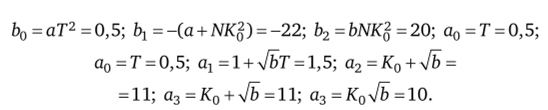
Из таблиц стандартных интегралов Jn для п = 3 имеем выражение для средней квадратической ошибки, по которой можно вычислить ее значение:

Пример 1.5. Система автоматического управления (см. рис. 1.17) находится под воздействием случайных задающего сигнала x (t) и возмущения/(t), статистически не связанных между собой. Спектральные плотности задающего сигнала и возмущения известны:

Найти величину средней квадратической ошибки системы z2, если передаточная функция.

Решение. Согласно (1.22) выражение для спектральной плотности ошибки может быть определено следующим образом:

где W (j'co) = W] (jo))W2 (jco).
Запишем среднюю квадратическую ошибку через спектральные плотности Sv(co) и Sf (co):

Запишем выражение для первой составляющей ошибки:

Полиномы H (jco) и G (jco) для zj имеют вид  Выпишем коэффициенты полиномов:
Выпишем коэффициенты полиномов:
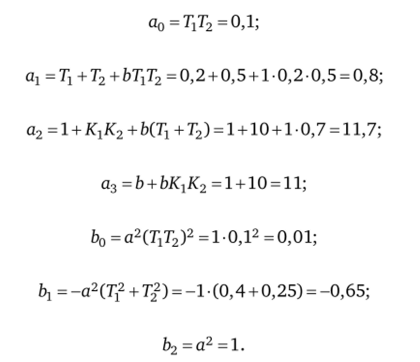
По формулам таблиц значений стандартных интегралов z" для п = 3 имеем 
Вычислим zj в виде.
Тогда полиномы Н0со) и G (jco) подынтегрального выражения примут вид.

Выпишем коэффициенты полиномов:

По формулам таблиц значений стандартных интегралов Jn для п = 2 имеем.

Результирующая средняя квадратическая ошибка системы 
В случае сложных систем автоматического управления, описываемых дифференциальными уравнениями высокого порядка, а также при наличии графиков спектральной плотности случайных воздействий и частотных характеристик замкнутой системы используется графоаналитический метод расчета ошибок [13, 16].
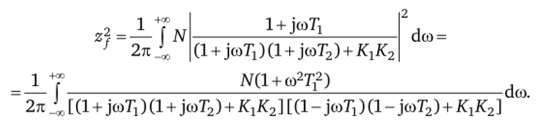
Сущность этого метода поясним на примере вычисления составляющей средней квадратической ошибки zj от действия возмущения /(t).
Считаем известными передаточную функцию замкнутой САУ W (p) и спектральную плотность стационарного возмущающего сигнала S^Cco), действующего на входе.
Тогда выражение для средней квадратической ошибки имеет вид.

Последовательность действий при графоаналитическом методе расчета средней квадратической ошибки имеет следующий вид [13].
- 1. По известным значениям АЧХ замкнутой системы | W (jco) | вычисляется и строится график | W (jo)) |2.
- 2. Для каждой данной частоты значение спектральной плотности на входе S^(co) умножается на величину квадрата АЧХ: строится кривая спектральной плотности Szj (o)).
- 00
- 3. Определяется значение интеграла jSZf (co)dco, для чего
о вычисляется площадь, заключенная между кривой S2^(co) и осью абсцисс.
4. Средний квадрат ошибки вычисляется путем деления найденной площади на п.
Спектральную плотность ошибки можно также рассчитать, пользуясь логарифмическими частотными характеристиками.
Из выражения для спектральной плотности ошибки ясно: значение zj в общем случае зависит от взаимного расположения графиков Sf (oo) и | W (j (o) |. При совпадении максимумов ошибка оказывается большой, и, наоборот, разнесение этих максимумов путем выбора параметров системы приводит к уменьшению ошибки.