Исследование аэп со стандартными настройками регуляторов
Для исследования АЭП со стандартными настройками регуляторов необходимо построить систему подчиненного регулирования (СПР). Для получения СПР необходимо настроить последовательно контуры тока, скорости и положения по такому же алгоритму, как это было сделано в домашней работе по АЭП за 4-й курс 1-й семестр. Задача регулятора заключается в компенсации большой постоянной времени объекта… Читать ещё >
Исследование аэп со стандартными настройками регуляторов (реферат, курсовая, диплом, контрольная)
Для исследования АЭП со стандартными настройками регуляторов необходимо построить систему подчиненного регулирования (СПР). Для получения СПР необходимо настроить последовательно контуры тока, скорости и положения по такому же алгоритму, как это было сделано в домашней работе по АЭП за 4-й курс 1-й семестр.
Настройка контура тока на технический оптимум
Схема моделирования контура тока изображена на рис. 3.1.
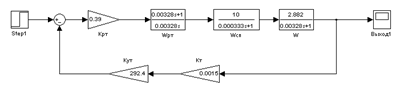
Рис 3.1. Схема контура тока
Передаточная функция силового преобразователя была найдена ранее:

Выберем ПИ-регулятор с передаточной функцией:
([3], с. 140 — 141),.
где kрт — коэффициент передачи регулятора тока; Трт — постоянная времени регулятора тока.
Задача регулятора заключается в компенсации большой постоянной времени объекта регулирования. Поэтому постоянную времени регулятора тока (Трт) выбирают равной электромагнитной постоянной времени цепи якоря (Тэ).
Трт = Тэ = 0.328 с.
При настройке регулятора на технический оптимум:
([3], с. 140]),.
где kт — коэффициент обратной связи в контуре тока.

.

.
Передаточная функция якорной цепи двигателя была найдена ранее:
.
Также для того чтобы установившееся значение тока совпало с номинальным, следует в прямую связь поставить коэффициент: 666.7, а в обратную связь по току — 1/666.7 = 0.0015. В результате поучим новые значения и .
Промоделируем контур тока в SIMULINK, используя модель Ktoka.mdl.
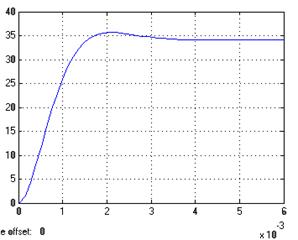
Рис 3.2. Зависимость i (t)
Анализ графика: время переходного процесса: 1.3 мс, перерегулирование: 4.2%.