Системы радиолокации.
Радиотехнические системы
Структурные схемы вариантов построения РЛС приведены на рис. 6.50, где схемы а, б, ив иллюстрируют принцип работы активной системы радиолокации. В своем составе они имеют передающее устройство (Пер), сигналы которого используются для обнаружения цели (Ц). Однако возможно несколько вариантов построения РЛС. Ого может быть система с разделенными антеннами у передатчика и приемника. Такая система… Читать ещё >
Системы радиолокации. Радиотехнические системы (реферат, курсовая, диплом, контрольная)
Системы радиолокации являются одной из разновидностей систем извлечения информации. Радиолокацией называется совокупность методов и технических средств для определения места нахождения и параметров движения объектов с помощью радиоволн.
Радиолокация решает задачи обнаружения различных объектов в пространстве, измерения их координат и параметров движения. Для решения этих задач, как правило, используют радиоволны, отраженные от объектов-радиолокационных целей, либо же сигналы, излучаемые самой целью, включая установленные на ней радиосредства.
Первым упоминанием о возможности использования радиоволн в целях обнаружения объектов и измерения направления на них можно считать отчег А. С. Попова об опытах радиосвязи в 1897 г. на Балтийском морс. В результате проведенных экспериментов была показана возможность обнаружения корабля «Лейтенант Ильин» при прохождении им между кораблями «Европа» и «Африка», осуществляющих сеанс радиосвязи. В отчете делается предложение использовать радиосвязь для ориентирования при плохой видимости и скрытного обнаружения. Также в отчете обсуждается явление вторичного излучения радиоволн препятствиями. В дальнейшем существенным стимулом к развитию радиолокации явилась авиация, в частности задача обнаружения самолетов. В тридцатых годах прошлого века началось активное развитие радиолокации сначала с использованием непрерывного излучения (Шсмбсль Б. К., 1935 г., сигнал с частотной модуляцией), а затем и импульсного (Кобзарев Ю.Б., 1937 г.). К началу войны у нас в стране имелось несколько десятков выпущенных и принятых на вооружение радиолокаторов.
В радиолокации, как правило, измеряют расстояние до цели, угловые координаты цели (азимут, угол места) и радиальную (относительно радиолокатора) составляющую скорости цели. Координаты радиолокационной цели могут быть как в сферической, так и в цилиндрической системах отсчета.
В сферических координатах положение цели Ц определяется через D-дальность до цели (радиус-вектор); <�р — угол места (он дополняет полярный угол 0 до 90°).
В цилиндрических координатах цель характеризуется высотой ее положения Н, полярной координатой фет (угол между направлением на север и цель) и горизонтальной дальностью Dr
Отметим, что выбор системы координат во многом определяется методами радиолокации.
Радиолокационные системы используют в качестве носителя информации радиолокационный сигнал и электромагнитную волну, излученную целью. В зависимости от природы образования радиолокационного сигнала различают активный, активный с активным ответом и пассивный методы радиолокации.
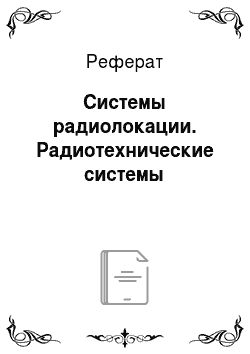
Структурные схемы вариантов построения РЛС приведены на рис. 6.50, где схемы а, б, ив иллюстрируют принцип работы активной системы радиолокации. В своем составе они имеют передающее устройство (Пер), сигналы которого используются для обнаружения цели (Ц). Однако возможно несколько вариантов построения РЛС. Ого может быть система с разделенными антеннами у передатчика и приемника. Такая система позволяет использовать непрерывные сигналы и разносить в пространстве передатчик и приемник. Так как уровень отраженного сигнала мал, очень важно обеспечить развязку передающей и приемной антенн для обеспечения возможности выделения с помощью приемника (Прм) сигнала малого уровня. Сам факт наличия сигнала позволяет осуществить обнаружение цели, его анализ и сравнение с излученным сигналом, осуществляемое в устройстве обработки информации (УОИ), получить сведения о координатах цели и параметрах ее движения.
Рис. 6.50. Структурные схемы вариантов построения РЛС: а — активная РЛС; б — активная РЛС с общей антенной; в — активная разнесенная в пространстве РЛС; г — пассивная РЛС; д — активная РЛС с активным ответом При использовании импульсных радиолокационных сигналов, как правило, применяются РЛС с одной антенной. Излучение сигнала Прд и прием Прм разнесены во времени. Особо следует выделить многопозиционные РЛС, представляющие собой разнесенную в пространстве радиотехническую систему. Из одних точек пространства осуществляется облучение цели, из других — прием отраженных сигналов (в общем случае ряд РЛС, входящих в систему, могут осуществлять как излучение, так и прием сигналов). Полученная информация от составляющих систему РЛС концентрируется в пункте обработки информации (ПОИ) и обрабатывается совместно с синхронизирующими работу системы сигналами, что позволяет получить высокоточную информацию о цели. Несмотря на усложнение системы в целом многопозиционные РЛС развиваются, так как позволяют решать задачи, поставленные перед системой более высокого уровня надежности, с том числе за счет гибкости системы.
Системы пассивной радиолокации (рис. 6.50, г) имеют только приемное устройство. Однако класс сигналов, используемых для получения информации о пространственном положении целей, достаточно широк. Это может быть прием сигналов, излучаемых работающими радиосредствами, расположенными на цели, тепловое излучение элементов цели (например, двигателя) и излучение цели в оптическом диапазоне. Используемые методы селекции точечных сигналов и знание их спектральных характеристик позволяет выделить цель на ярком фоне (например, излучение работающего двигателя на фоне Солнца).
Активные РЛС с активным ответом (рис. 6.50, д) в качестве сигнала от цели используют не отраженный сигнал, а сигнал, излученный присмопсрсдающим устройством, размещенным на цели в ответ на запросный сигнал РЛС. Сигнал ответчика может являться кодовой посылкой, содержащей достаточно много информации о цели (например, бортовой номер самолета). Даже при мощности передатчика ответчика в несколько ватт сигнал от цели, принимаемый запросчиком, имеет достаточный уровень, намного превышающий энергию сигналов в случае простого псрсотражсния зондирующего сигнала целью.
Радиолокационные системы принято подразделять на три основные группы:
- 1) обзорные — поиск и обнаружение целей, а также измерение их координат с невысокой точностью. Они работают в режиме периодического обзора заданной зоны пространства и обеспечивают получение информации о всех целях, там находящихся;
- 2) следящие — предназначены для точного и непрерывного измерения координат целей. Для этого осуществляется слежение за одной или несколькими целями;
- 3) специализированные — выполняют конкретные измерения, как правило, измеряют один параметр цели. Виды измерений различны — например, самолетные высотомеры, доплеровские измерители вектора скорости самолета и т. д.
Безусловно, задачи, решаемые РЛС разных групп, могут объединяться в многофункциональных РЛС.
Так как технические решения и в области схемотехники, и в конструкции сильно зависят от способа формирования и обработки сигналов и места установки РЛС, различают наземные (стационарные и передвижные) и бортовые: самолетные, корабельные и т. п. Сигналы могут быть импульсные и непрерывные, когерентные и некогерентные.
Для проектирования РЛС задаются ее тактические характеристики: зона действия (рабочая область пространства); измеряемые координаты и точность их измерения; разрешающая способность по измеряемым координатам; помехозащищенность; пропускная способность (предельное количество целей); мобильность; надежность. В результате проектирования определяются технические характеристики РЛС, обеспечивающие достижение требуемых тактических характеристик. К основным техническим характеристикам ошосятся: характеристики обзора рабочей области пространства; вид зондирующих импульсов и способ обработки сигналов; способы измерения координат целей; выбранная длина волн; мощность передатчика, чувствительность приемника; параметры диаграммы направленности (ДН) антенн; масса, габариты РЛС, ее компоновка по блокам, потребляемая энергия и т. п.
Сигналы в радиолокации описаны в гл. 4. Сейчас же затронем те стороны радиолокационных сигналов, которые необходимы для понимания основных принципов радиолокации. Информационная составляющая в радиолокационном сигнале появляется как результат взаимодействия зондирующего сигнала с целью. Само наличие отраженного сигнала позволяет сделать заключение о наличии цели. Кроме того, цель как бы «модулирует» взаимодействующий с ней сигнал. Очевидно, от вида исходного сигнала зависит и характер его изменения. Однако для любого сигнала, отраженного целью, направление его прихода — фронта отраженной волны, позволяет получить информацию об угловом положении цели, а время, затраченное сигналом на достижение цели и возращение обратно, определяет дальность цели. Наличие изменения расстояния до цели — радиальной скорости, проявится в доплеровском смещении частоты отраженного сигнала.
Таким образом, измерение времени, затраченного сигналом на достижение цели и возращение обратно определяется выражением:

Так как радиальная скорость цели Vr много меньше скорости распространения радиоволн (скорости света), то можно записать, учитывая, что V<< С:

Кроме того, принимаем отраженный сигнал с флуктуирующими относительно своих средних значений параметрами. Если измерение среднего значения параметров отраженного сигнала позволяет определить координаты цели, то наличие флуктуаций, как правило, медленных по сравнению с длительностью сигнала, снижаег эффективность РЛС. Однако измерение спектральных характеристик флуктуаций позволяет решать задачи идентификации целей.
Для получения радиолокационной информации осуществляется сравнение посланного сигнала с принятым. Посланный (зондирующий) сигнал должен обладать достаточной энергией для обнаружения отраженного от цели сигнала в шумах, обеспечить возможность измерения координат целей и их разрешение и быть практически реализуемым.
Разрешение по угловым координатам зависит от ширины диаграммы направленности антенн, а разрешение по дальности и скорости — от выбора зондирующего сигнала. Разрешение по дальности определяется возможностью зафиксировать минимальный сдвиг сигналов, отраженных от разных целей. Аналогично следует понимать разрешение по радиальной скорости — минимально фиксируемый сдвиг по частоте.
Как правило, в рабочей зоне РЛС находится ряд целей или же цели и объекты, создающие пассивную помеху. Наличие разрешения позволяет выделять полезные сигналы на фоне помех, получать качественное изображение земной поверхности. Чем выше разрешение, тем выше точность измерения соответствующих координат. Как уже говорилось, теоретические положения были рассмотрены ранее и сейчас воспользуемся, без доказательства, соотношением: разрешающая способность по времени обратно пропорциональна ширине спектра сигнала: б/рс= (2А/') отсюда следует — чем шире спектр сигнала, тем выше разрешающая способность. Следовательно, гармонические сигналы, обладающие узким спектром, не имеют разрешения по времени. Для наличия разрешения необходимо, чтобы на интервале 8?рс сигнал существенно менялся как, например, импульсный сигнал за время его длительности.
Аналогично разрешающая способность по частоте обратно пропорциональна длительности сигнала: б/рс = 1/Г,. Это следует из того, ч то частота колебания определяется за время не менее одного периода колебаний, а для выявления различия частот двух колебаний необходимо наблюдение за период разностной частоты. Из выражений (6.31) и (6.32) следует:

Так как требования к зондирующим сигналам противоречивы, то, следовательно, нет универсальных сигналов. В результате приходится «приспосабливать» сигналы для решения конкретных задач.
Непрерывные сигналы позволяют достаточно просто решать задачу получения разрешения по скорости. Модулированные непрерывные сигналы позволяют решить вопрос получения разрешения по дальности. Однако в РЛС с непрерывными сигналами возникают проблемы «развязки» приемника и передатчика. Эта задача чрезвычайно сложна при использовании одной антенны, да и при двух «просачивание» мощного излучаемого сигнала создает помеху приему. В результате в настоящее время применение непрерывных сигналов ограничено.
Использование импульсных сигналов в РЛС, благодаря тому, что излучение и прием сигналов разнесены во времени, позволяет применить одну антенну у передатчика и приемника. Импульсные сигналы позволяют получить разрешение по дальности простыми методами.
Как уже говорилось, для обеспечения требуемой дальности в РЛС необходима достаточная энергия зондирующего сигнала. Однако решение этого вопроса простым увеличением амплитуды сигнала нс представляется возможным. Есть предельная энергия, которую может пропустить антенно-фидерный тракт, есть ограничения по размеру и весу аппаратуры, есть предельные возможности источников питания самолетных РЛС. Поэтому вопрос решается накоплением энергии последовательности (пачки) импульсов. Рассмотрим образование пачки импульсов на примере обзорной РЛС (рис. 6.51).


Рис. 6.51. Образование пачки импульсов: а — сканирование пространства лучом антенны РЛС; б — пачка импульсов, отраженных от цели При обзоре пространства ДН антенны РЛС некоторое время направлена на цель, которая при этом облучается зондирующими импульсами и в это время могут быть приняты отраженные от цели сигналы. В результате, с учетом скорости сканирования Qck, ширины и формы ДН принятая последовательность (пачка) импульсов имеет огибающую, повторяющую форму ДН антенны. Импульсы, входящие в пачку, могут быть как простыми радиоимпульсами, так и сложными, имеющими дополнительную внутриимпульсную модуляцию. Кроме того, импульсы в пачке могут быть некогерентными и когерентными. Если импульсы в пачке некогерентные, то начальные фазы радиоимпульсов случайны и независимы. В этом случае возможности РЛС по разрешению дальности и скорости определяются отдельным импульсом из пачки. Получение достаточного разрешения по дальности удается получить, используя импульсы длительностью Т = (0,05 — 5)-1(Г6с. При этом бD^= 7,5 — 75 м.
Используя когерентную пачку импульсов (фазовая структура импульсов внутри пачки взаимосвязана), можно получить как разрешение по дальности, так и по скорости. Когерентную пачку следует рассматривать как один сигнал большой длительности: Ts = п-Тсп, где п — число импульсов в пачке; Та — период следования импульсов. Сигнал существует все время наблюдения и с этой точки зрения его можно рассматривать как непрерывный. Следовательно, он обеспечивает разрешение по скорости. Однако в ряде случаев возникает неоднозначность при измерении либо дальности, либо скорости. Поэтому когерентную пачку нельзя считать универсальным сигналом. Дальнейшее развитие теории радиолокационных сигналов пошло по пути применения сложных импульсов — они имеют внутриимпульсную модуляцию.
Образование отраженного от целей сигнала связано с возбуждением на поверхности объекта при облучении его радиоволнами токов проводимости или смещения, зависящих ог формы объекга (цели), материала цели и сс геометрических размеров. В свою очередь, эти токи приводят к появлению вторичного излучения или рассеяния радиоволн. Особенности вторичного излучения проиллюстрированы графиком, представленным на рис. 6.52, где г — радиус металлической сферы; X — длина волны; Ррж- мощность вторичного излучения; Р0- вторичное излучение при ИХ «I; / - зона рефракции или зона Рэлея; 2 — зона резонансного рассеяния (г* 1, сфера является объемным резонатором); 3 — зона отражения (в ней Ррж/Р"~ const). Подобная приведенной на графике закономерность наблюдается для всех целей правильной формы. В радиолокации используют зону отражения, что при реальных размерах целей и определяет диапазон используемых радиоволн.

Рис. 6.52. Вторичное излучение как функция отношения Р /Р" от rfk.
Отражающие свойства целей в радиолокации характеризуют эффсктивной площадью рассеяния цепи 5')фф:

где D — дальность до цели;
Рм рлс плотность потока мощности отражаемого сигнала у антенны РЛС;
Рм ц-плотность потока мощности зондирующего сигнала у цели; Ерж— напряженность электрического поля у антенны РЛС;
Еа— напряженность электрического поля у цели.
Таким образом, эффективная площадь рассеяния (ЭПР) цели является фиктивная поверхность площадью 5,фф, являющаяся изотропным и не поглощающим энергию псрсизлучатслсм. Помещенная в точку положения цели S,^ создает у антенны РЛС такую же плотность потока мощности, как и реальная цель.
Все цели, с точки зрения методов определения эффективной отражающей площади, делят на элементарные и сложные. ЭПР элементарных целей можно определить аналитически. Но число объектов такого вида ограничено. Это, например, шар, лист, вибратор, угловой отражатель и т. п.
ЭПР сложных целей определяют экспериментально и их описание возможно только в статистической форме. Сложными целями являются большинство реальных целей.
С позиции разрешающей способности сложные цели подразделяются на точечные и распределенные (поверхностные и объемные). На примере импульсной РЛС рассмотрим понятие «разрешаемый объем». На рис. 6.53 изображена ДН импульсной РЛС, симметричная относительно продольной оси.

Для данного случая разрешаемый объем — область пространства, в которой цели не разрешаются по углам и дальности. По дальности не разрешаются цели, находящиеся на расстоянии друг от друга менее 8?)/>с= СТи/2, а по углам — в пределах угла 0 — ширины ДН. Можно перейти к абсолютным величинам — объем имеет форму усеченного конуса с диаметрами оснований 0Л(?> ± bDfK/2). С большой степенью приближения разрешаемый объем может быть представлен в виде цилиндра с основанием 0AD и высотой 6D . Цели, находящиеся внутри объема, воспринимаются как одна цель и, следовательно, они точечные. Цели, превышающие объем цилиндра, относятся к распределенным.
Реальные радиолокационные цели (самолеты, корабли и т. д.) являются сложными многоэлементными целями. Отраженный сигнал, принимаемый РЛС, образован в результате векторного сложения элементарных сигналов и его интенсивность зависит от взаимного положения цели и РЛС. В результате диаграмма обратного рассеяния сложной цели изрезана. Изменение в пределах 1 ° дает изменение ЭПР до 30 дБ. Так как ЭПР используется для расчета дальности РЛС, берутся усредненные величины. Полученные при наблюдении усредненные значения ЭПР для некоторых характерных целей приведены в табл. 6.2.
Таблица 6.2
Наименование цели. | ^эфф.О" М". |
Транспортный самолет. | |
Тяжелый бомбардировщик. | 10−20. |
Средний бомбардировщик. | 7−10. |
Истребитель. | 3−5. |
Головка баллистической ракеты. | 0,2. |
Крылатая ракета. | 0,1. |
Большой корабль. | |
Катер | |
Крейсер | |
Подводная лодка в надводном положении. | |
Рубка подводной лодки. | |
Человек. | 0,5 ч- 0,8. |
Как уже отмечалось, при изменении взаимного положения цели и РЛС на малую величину (около 1 °) сигнал, отраженный от цели, флуктуирует (амплитуда, фаза, доплеровская частота, задержка). Это низкочастотные флуктуации — их основная энергия сосредоточена в диапазоне 0 — 10 Гц.
При облучении зондирующими сигналами распределенных целей сталкиваемся с несколькими видами отражений. Если поверхность «гладкая» — размеры шероховатости поверхности малы по сравнению с Хс, то отражение происходит по законам геометрической оптики и угол падения равен углу отражения (зеркальное отражение, РЛС не принимает обратную волну за исключением «перпендикулярного» облучения). Если шероховатость поверхности соизмерима с длиной волны, то от ражение «диффузное», обратная волна равномерно рассеивается в пространстве и принимается РЛС.
В результате гладкие поверхности (спокойная водная поверхность, шоссе, взлетная полоса) на экране РЛС из-за отсутствия отраженного сигнала создают затемненные зоны. Шероховатые поверхности (пашня, лес и др.) формируют умеренно засвеченные зоны, а инженерные сооружения создают сигнал большой интенсивности и ярко засвечиваются на экране. Результатом является контрастное радиолокационное изображение местности.
Объемно распределенная цель может быть естественного происхождения — скопление гидрометров (дождь, снег, град) и искусственного — облако из кусочков фольги (облако искусственных элементарных отражателей) — пассивная маскирующая помеха.
Выбор конкретной длины волны зависит от многих факторов. Она должна быть меньше геометрических размеров цели. В радиолокации используются диапазоны волн от миллиметрового до метрового. Наземные РЛС (за исключением загоризонтных) работают в диапазоне 10 сантиметров, а самолетные -2−4 сантиметра. Это обусловлено, в том числе, связью ширины ДН 0Д с длиной волны Хс и раскрывом антенны </<sub>А: 