Конструктивные принципы построения емкостных датчиков механических величин
Распространенным устройством, преобразующим акустические колебания окружающей воздушной среды в соответствующие электрические сигналы, является емкостный микрофон. Емкостные датчики широко применяются для измерения таких механических величин как вибрации, перемещения, скорости, ускорения, усилия, крутящие моменты и давление. А следовательно, и электрическая емкость всего преобразователя… Читать ещё >
Конструктивные принципы построения емкостных датчиков механических величин (реферат, курсовая, диплом, контрольная)
Емкостные датчики широко применяются для измерения таких механических величин как вибрации, перемещения, скорости, ускорения, усилия, крутящие моменты и давление.
Распространенным устройством, преобразующим акустические колебания окружающей воздушной среды в соответствующие электрические сигналы, является емкостный микрофон.
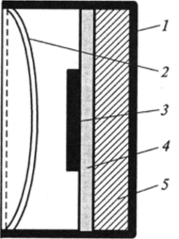
Рис. 4.7. Конструктивная схема емкостного микрофона.
На рис. 4.7 представлена конструктивная схема емкостного микрофона, который содержит размещенные в корпусе / мембрану 2 из электропроводящего материала, неподвижную пластину J, установленную на диэлектрике 4, и демпфирующий слой 5. При изменении акустического давления мембрана 2 деформируется и изменяется ее расстояние до пластины 3. В результате происходит изменение электрической емкости микрофона, что и используется.
На рис. 4.8 изображена схема емкостного акселерометра. В корпусе 1 этого акселерометра на консольной балке 2 установлена инерционная масса 2, а на самом корпусе — изолированная от него неподвижная пластина 4. Под действием толчка или вибрации изменяется расстояние между массой 3 и неподвижной пластиуой 4 (это соответствует пунктирному изображе;
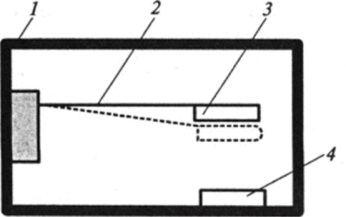
Рис. 4.8. Схема емкостного акселерометра.
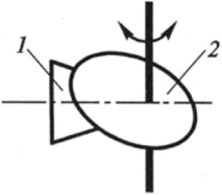
Рис. 4.9. Схема емкостного датчика крутящего момента.
нию), а следовательно, и электрическая емкость всего преобразователя.
На рис. 4.9 показан емкостный преобразователь для измерения угла поворота вала. Здесь пластина / жестко закреплена на валу и перемещается относительно пластины 2 таким образом, что зазор между ними остается неизменным, а меняется площадь их перекрытия. Путем подбора формы пластин / и 2 можно получить любую функциональную зависимость между перемещением и емкостью. Преобразователи с переменным перекрытием применяются при измерении перемещений более 1 мм.
На рис. 4.10 изображен емкостный датчик силы. Здесь пластина 2 закреплена на пружинах 5 и б и может перемещаться параллельно самой себе непосредственно под действием измеряемой силы F. Пластины 7 и 3 неподвижны и изолированы от подложки и от корпуса. Если под действием измеряемой силы.
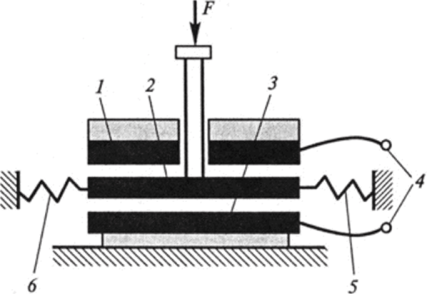
Рис. 4.10. Конструктивная схема емкостного датчика силы электрическая емкость между пластинами 2 и У увеличивается, то электрическая емкость между пластинами 2 и 3 уменьшается, и, наоборот, если под действием измеряемой силы электрическая емкость между пластинами 2 и У уменьшается, то электрическая емкость между пластинами 2 и 3 увеличивается. Это изменение электрических емкостей может быть снято с выводов 4 и подано на измерительный прибор.