Адаптивные регуляторы и перспективы этого подхода
Пример 2.3. Рассмотрим две модели объекта, ЛАЧХ которых отличаются только в низкочастотной области: Рис. 2.4. Отклик на единичное ступенчатое воздействие звеньев с передаточной функцией: Рис. 2.6. Отклик системы по рис. 2.5 на единичное ступенчатое воздействие: Рис. 2.5. Структура для моделирования системы по примеру 2.3. Формулировка задачи проектирования адаптивной системы. Линия 1 — с объектом… Читать ещё >
Адаптивные регуляторы и перспективы этого подхода (реферат, курсовая, диплом, контрольная)
Адаптивные регуляторы должны изменять свои параметры для обеспечения требуемого качества системы в условиях изменяющихся параметров объекта. Одна из существенных особенностей таких систем состоит в анализе каких-либо формальных показателей устойчивости и качества системы для принятия решения об изменениях параметров настройки регуляторов. Такой подход позволяет компенсировать изменения параметров объекта в некотором диапазоне, как правило, заранее известном. Таким образом, проектирование адаптивных систем позволяет за счет более сложного алгоритма работы исключить последний этап (испытание и корректировка), а также сообщает системе новые свойства, состоящие в меньшей зависимости качества и точности системы от неконтролируемых изменений параметров объектов, при условии, что темпы изменений этих параметров заметно меньше, чем темпы переходных процессов.
В развитие этого подхода можно предложить разработку таких алгоритмов управления, которые не требуют определения полностью всей модели объекта или, как минимум, допускают большую погрешность идентификации объекта по сравнению с другими методами. Это обосновано тем, что процедура идентификации сама по себе бывает весьма трудоемкой и дорогостоящей. Поэтому автоматическая настройка регуляторов может оказаться менее трудоемкой и более эффективной, чем последовательное выполнение четырех этапов экспериментальной идентификации и аналитического проектирования.
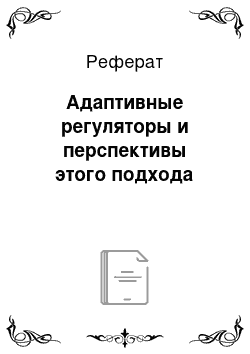
Пример 2.3. Рассмотрим две модели объекта, ЛАЧХ которых отличаются только в низкочастотной области:
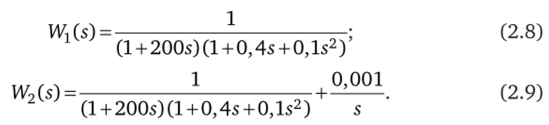
Отклики этих звеньев на единичный ступенчатый скачок различаются, как видно на графиках (рис. 2.4). Однако поскольку высокочастотные части этих объектов одинаковые, то в составе системы автоматического управления эти объекты ведут себя практически одинаково. Действительно, моделирование по структуре в соответствии с рис. 2.5 дает переходные процессы, показанные на рис. 2.6, практически совпадающие. В данной структуре моделируются оба варианта объекта, в зависимости от наличия или отсутствия связи нижней ветви (с интегратором) с суммирующим устройством.
Вывод 2.3. Низкочастотная часть частотной характеристики объекта может не оказывать заметного влияния на переходный процесс в системе, т. е. на устойчивость системы.
Вывод 2.4. Для успешной работы адаптивного контура достаточно знать высокои среднечастотную часть частотной характеристики объекта.

Рис. 2.4. Отклик на единичное ступенчатое воздействие звеньев с передаточной функцией:
(2.8) —линия 2; (2.9) —линия 1.
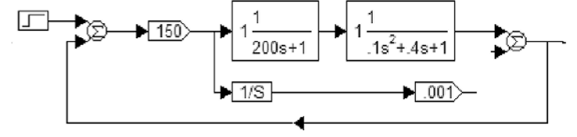
Рис. 2.5. Структура для моделирования системы по примеру 2.3.
Формулировка задачи проектирования адаптивной системы.
Дано:
- 1) известна модель объекта, либо она может быть определена в результате цикла испытаний. Известно также, что в этой модели, по меньшей мере, один из коэффициентов изменяется в некотором ограниченном интервале, скорость изменения ограничена снизу;
- 2) имеются требования к замкнутой системе.
Требуется: спроектировать регулятор, такой, чтобы система отвечала требованиям по п. 2 в условиях по п. 1.
Методы решения. Параметры регулятора могут изменяться в ходе работы системы под действием некоторого устройства, например анализатора сигналов в системе. Также параметры регулятора могут изменяться под воздействием таймера (часов). Кроме того, могут изменяться структура регулятора, т. е. его математическая модель, и осуществляться предварительная настройка системы.
Рис. 2.6. Отклик системы по рис. 2.5 на единичное ступенчатое воздействие:
линия 1 — с объектом (2.9); линия 2 — с объектом (2.8).