Новые структуры для одноканальных объектов
Метод решения этой задачи состоит в численной оптимизации с использованием программы VisSim. При этом структура регулятора содержит два канала, каждый из которых состоит из пропорционального и дифференцирующего трактов, выходы которых суммируются. Во второй тракт рекомендуем ввести элемент «зона нечувствительности», на основании результатов, описанных в параграфе 6.6. Ширина зоны… Читать ещё >
Новые структуры для одноканальных объектов (реферат, курсовая, диплом, контрольная)
Робастное проектирование ресурсосберегающего двухканального регулятора для объекта с одним выходом
Управление объектом с одной выходной величиной с использованием двух входных воздействий применяется довольно широко, поскольку это позволяет совместить достоинства двух каналов и преодолеть их недостатки, как показано в гл. 7. Данный метод может применяться при наличии особых свойств объекта управления, которые состоят в том, что изменение выходной величины может происходить вследствие совокупных действий двух факторов, т. е. объект может управляться по двум каналам воздействия (двум приводам). Целесообразность одновременного использования обоих каналов при этом диктуется тем, что каждый из каналов обладает недостатками, при этом недостатки одного из каналов не совпадают с недостатками другого. В противном случае следует использовать лучший канал, а худший не применять.
В гл. 7 предложены и исследованы методы расчета регулятора. В частности, показано, что можно использовать программу VisSim, а в качестве стоимостной функции целесообразно применять интеграл от модуля ошибки, умноженной на время с момента начала переходного процесса. Также рекомендовано вводить с весовыми коэффициентами дополнительные члены под интеграл стоимостной функции, такие как квадрат управляющего воздействия и др.
Значительный интерес представляет использование в качестве дополнительного канала воздействия такого канала, который характеризуется крайне ограниченными возможностями, но при этом имеется такой весомый аргумент для его применения, как экономия ресурса.
Важно исследовать, насколько такое использование может быть оправдано, можно ли обеспечить робастное управление, под которым в данном случае понимается достаточно малое влияние точности реализации рассчитанных коэффициентов (так же как точности определения параметров математической модели объекта) на устойчивость системы, а также на вид переходного процесса.
Данные вопросы могут быть исследованы моделированием, однако при этом необходимо осуществить достаточное количество подобных экспериментов с различными моделями объектов, поскольку какие-то проблемы могут не проявить себя в некоторых частных случаях, но в других случаях стать непреодолимыми.
В данном параграфе решается вопрос численной оптимизации ПД-регулятора для объекта, содержащего два канала управления, каждый из которых содержит интегральную компоненту. При этом в каждом канале имеется фильтр второго порядка, а в «худшем» канале дополнительно содержится нелинейный элемент, преобразующий непрерывный сигнал в дискретный, на выходе которого находится дифференцирующее звено. Это делает канал крайне неэффективным в чистом виде, поэтому актуально исследование вопроса целесообразности применения такого канала совместно с «лучшим» каналом, свободным от указанной нелинейности.
Пример 10.1. Рассмотрим объект, математическая модель которого задана суммой двух каналов воздействия. Исследуем метод численной оптимизации для расчета регулятора, основанный на стоимостной функции, содержащей затраты энергии. Кроме того, используем различную стоимость ресурса управления при одинаковом статическом коэффициенте передачи каждого канала управления. Естественно предположить, что цена ресурса, который используется при управлении по «худшему» каналу, намного ниже, чем цена ресурса управления по «лучшему» каналу (первому). Иначе «худший» канал (второй) не может быть полезен. Поскольку используется критерий, включающий экономию ресурса, целесообразно рассматривать класс объектов, содержащих интегратор. В структуре модели общий для обоих каналов управления интегратор может быть вынесен за сумматор.
Пусть передаточная функция первого канала имеет следующий вид:

где s — аргумент преобразования Лапласа.
Передаточная функция второго канала пусть имеет вид.

Передаточная функция (10.2) не полностью описывает второй канал управления. Для того чтобы описать его более слабые возможности по управлению на входе этого канала, введем в модель второго канала нелинейный элемент и последовательно с ним включенное дифференцирующее звено. Это дифференцирующее звено, естественно, компенсирует эффект интегратора, поэтому воздействие по второму каналу не влияет на скорость изменения выходной величины, а лишь привносит почти ступенчатые изменения ее подобно тому, как отброшенная ступень в момент ее отбрасывания может изменить скорость космического корабля за счет эффекта реактивного воздействия. Зададим дискретность нелинейного элемента величиной шага 0,2 ед. Зададим соотношение стоимостей ресурсов управления как 1: 50.
Метод решения этой задачи состоит в численной оптимизации с использованием программы VisSim. При этом структура регулятора содержит два канала, каждый из которых состоит из пропорционального и дифференцирующего трактов, выходы которых суммируются. Во второй тракт рекомендуем ввести элемент «зона нечувствительности», на основании результатов, описанных в параграфе 6.6. Ширина зоны нечувствительности соизмерима с величиной дискретности нелинейного элемента второго канала в модели объекта, но точного соответствия достичь невозможно, поскольку данная нелинейность устанавливается не на выходе этого канала регулятора, а на его входе. Таким образом, в нашем случае ширина зоны нечувствительности равна 0,3; шаг дискретности в модели второго канала управления равен 0,2.
Для сравнения используем два варианта целевой функции. В первом варианте это интеграл от модуля ошибки, умноженного на время с начала переходного процесса. Во втором варианте введем под интеграл взвешенную сумму квадратов управляющих сигналов, формируемых на выходах регулятора. На рис. 10.1 показана структурная схема для моделирования и оптимизации регулятора в соответствии с моделью объекта и предложенным методом решения задачи по первому варианту.
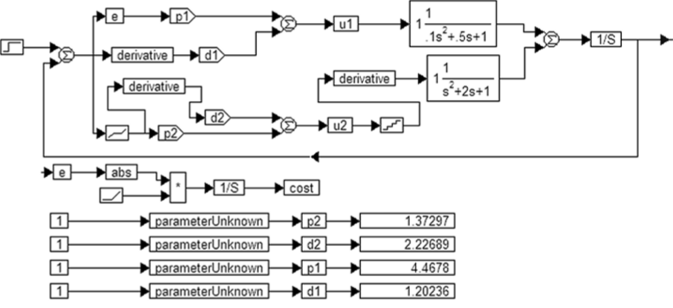
Рис. 10.1. Схема для моделирования и оптимизации регулятора в программе VisSim.
Стартовые значения всех параметров регулятора для процедуры оптимизации взяты равными единице. В результате процедуры получены значения, которые показаны в индикаторах справа внизу на рис. 10.1. На рис. 10.2 изображен блок для вычисления расхода ресурса за время переходного процесса. Этот расход составил 3,28 ед. На рис. 10.3 представлен переходный процесс в системе с рассчитанным регулятором. Длительность процесса составляет чуть более 6 с, имеется небольшое перерегулирование около 2%, число заметных колебаний равно трем. Вид управляющих сигналов показан на рис. 10.4.

Рис. 10.2. Схема блока для расчета стоимости затрат ресурса управления.
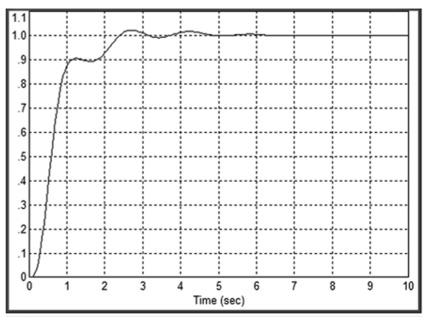
Рис. 10.3. Переходный процесс в системе по рис. 10.1.
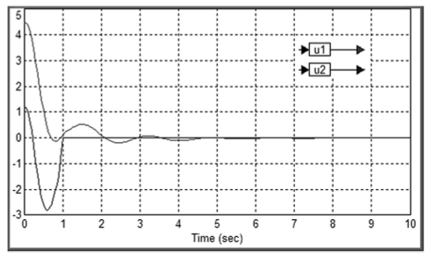
Рис. 10.4. Изменения управляющих сигналов в двух разных каналах в системе по рис. 10.1.
Пример 10.2. Введем в стоимостную функцию выход блока для расчета стоимости ресурса управления и повторно осуществим численную оптимизацию коэффициентов регулятора (рис. 10.5). Полученные коэффициенты регулятора также приведены в индикаторах справа внизу. Видно, что стоимость ресурса управления составила 0,608 ед., что более чем в 5 раз ниже, чем без использования этого метода. Соответствующие переходные процессы в этой системе показаны на рис. 10.6 и 10.7. Видно, что переходный процесс объективно улучшился, а именно: время процесса сократилось до 4,5 с, т. е. на четверть от предыдущего результата. Перерегулирование полностью отсутствует. Колебаний около равновесного состояния практически нет, имеется лишь одна волна обратного колебания, т. е., можно сказать, половина колебания. Снижение стоимости управляющего ресурса обеспечено тем, что дорогостоящий ресурс первого канала управления используется меньше: пиковое значение снижено от 4,5 ед. до величины менее 1,5 ед. Более дешевый ресурс управления во втором канале также используется более экономно: пиковые значения его были +1 и -3, а стали +0,3 и -0,1.
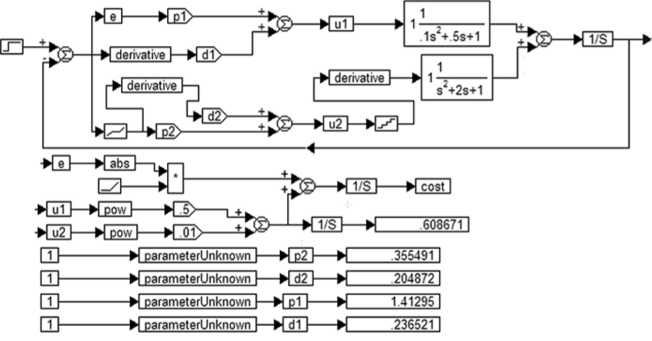
Рис. 10.5. Схема для моделирования и оптимизации регулятора с учетом стоимости ресурса управления и результаты численной оптимизации коэффициентов регулятора.
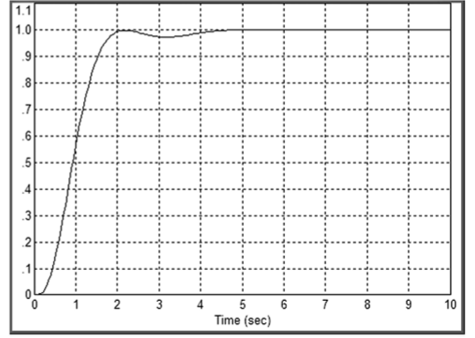
Рис. 10.6. Переходный процесс в системе по рис. 10.5.
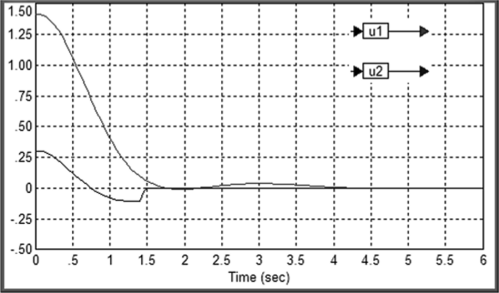
Рис. 10.7. Изменения управляющих сигналов в двух разных каналах в системе по рис. 10.5.
Примечание. В структуре на рис. 10.5 интегратор от вычислителя стоимости затрат ресурса не используется, поскольку в вычислителе стоимостной функции уже имеется свой интегратор. Можно было перенести сумматор, установив его на выходе интегратора, — это не принципиально, экономии количества блоков в схеме не было бы в любом случае.
Вывод 10.1.
Введение
в стоимостную функцию результата вычисления ресурса управления в виде интеграла от взвешенной суммы квадратов позволяет снизить расход ресурса, а также улучшить качество управления. Указанное улучшение качества включает повышение быстродействия, уменьшение или устранение перерегулирования, снижение количества колебаний в переходном процессе.
Данный вывод справедлив в том числе применительно к системе управления одной выходной величиной по двум каналам воздействия, а также при различных стоимостях ресурса по разным каналам. Это относится и к случаю, когда один из каналов содержит дискретный по уровню преобразователь. Все сказанное в данном выводе справедливо, по меньшей мере, для одного исследованного примера.