Динамика твердого тела
Заметим, что в определении 1.1 силовое поле f приложено к материальным точкам, имеющим радиус-вектор г (р, /) и принадлежащим изменяемому в процессе движения множеству П" а операция интегрирования (суммирования) осуществляется по неподвижному множеству О. В различных моделях механических систем поле f (р, t) может определяться как объект, зависящий от вектора г (р, t) и его производных по времени… Читать ещё >
Динамика твердого тела (реферат, курсовая, диплом, контрольная)
ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА. ПОЛЕ РЕАКЦИЙ СВЯЗЕЙ. ПРИНЦИП Д’АЛАМБЕРАЛАГРАНЖА. УРАВНЕНИЯ ДВИЖЕНИЯ.
Определение твердого тела и кинематические характеристики его движения приведены во второй главе. Согласно определению.
0.2 твердым телом называется система материальных точек (0,1(0), р), взаимные расстояния между которыми не меняются в процессе движения, т. е. | г (/, г0(|)) — г (I, г0(2)) | = | г0(|) — г0(2) | V г0(1), г0(2) 6 О.
Пусть твердое тело занимает область Пи^':П-> О, с Ег — движение твердого тела. Свяжем с твердым телом систему координат ЛС|Х2х3 и представим группу g' в виде.

Вектор р постоянен в системе координат Лс, х2х3 и определяет в ней положение произвольной точки N твердого тела, г (/), гР(/) — радиус-векторы точек N и Р в инерциальной системе координат 0{, |42?3 соответственно, Г (г) — ортогональный оператор, принадлежащий группе вращений трехмерного пространства 50(3). Движение твердого тела будет полностью задано, если задать движение полюса Р (вектор rP(t)) и оператор Г (/), определяющий ориентацию твердого тела. Таким образом, свободное твердое тело имеет шесть степеней свободы, а его конфигурационное многообразие М— E*xSO ( 3).
0.1.1. Говорят, что на систему материальных точек (С2,1(С1), р) действует силовое поле, если в каждой точке множества О, (или О) задано векторное поле f (р, /).
Векторное поле предполагается суммируемым по мере р и.

Сила F (A) называется результирующей силой или главным вектором сил, действующих на множество А.
Заметим, что в определении 1.1 силовое поле f приложено к материальным точкам, имеющим радиус-вектор г (р, /) и принадлежащим изменяемому в процессе движения множеству П" а операция интегрирования (суммирования) осуществляется по неподвижному множеству О. В различных моделях механических систем поле f (р, t) может определяться как объект, зависящий от вектора г (р, t) и его производных по времени и по пространственным переменным.
Для системы свободных материальных точек постулируется вариационный принцип Д’Аламбера-Лагранжа: поле ускорений г (р, /) таково, что.

Отсюда следует, что г = f, т. е. поле ускорений совпадает с силовым полем. В случае конечного числа материальных точек соотношение (1.2) представляется в виде.

В твердом теле существуют связи.

Здесь г* = г (р*, 0, *=1,2. Возможные перемещения удовлетворяют равенству.

Связи (1.3) порождают в твердом теле поле реакций. Предположим, что поле реакций связи идеально, т. е. работа поля реакций на возможных перемещениях равна нулю. Связь между точками, радиус-векторы которых г, и г2, порождает реакции R12 и R21. Если связь идеальна, то.

для любых 8Г|, бг2, удовлетворяющих (1.3). Из равенств (1.4), (1.5), учитывая произвольность вариаций 5гь 6 г, получим.

(для этого достаточно вначале положить 6г2 = 0, а затем 6 г, = 0). Здесь Х (/, г, г2) — неопределенный множитель Лагранжа. Очевидно, что Х (/, г, г2) = Х (г, г2, г,). Реакции связи R12, R21 описывают взаимодействие двух точек и удовлетворяют третьему закону динамики: силы взаимодействия направлены по прямой, соединяющей точки, равны и противоположно направлены.
Суммарное поле реакций связей в точке г, определяется интегралом.

Здесь суммирование ведется по р2, от которого зависит вектор г2(р2, /). Поле реакций связей (1.7) идеально, поскольку его работа на любых возможных перемещениях равна нулю. В самом деле.
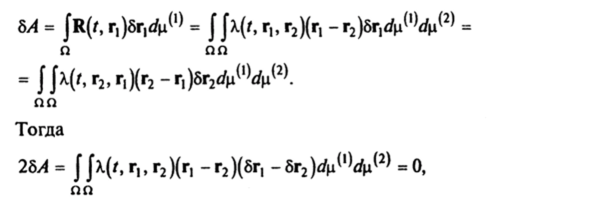
если учесть соотношение (1.4).
Согласно (1.1) возможные перемещения точек твердого тела представляются в виде 
Покажем, что вариация оператора 5 Г, умноженная на оператор Г-1, эквивалентна векторному умножению, т. е. бГГ^бах, где 6а — произвольный вектор трехмерного пространства. По определению вариации следует рассмотреть произвольное однопараметрическое семейство Г ((5), р е ]-р0, р0(и найти.
Согласно лемме о производной ортогонального оператора (см. § 2.3).
Обозначим абр = 5а и, учитывая равенство Гр = г-гЛ представим (1.7) в виде.

Работа поля реакций связей на возможных перемещениях (аксиома идеальных связей) с учетом (1.9) равна.

Учитывая произвольность векторов 8i> и 6а, получим соотношения.

Первое равенство в (1.10) означает, что результирующий вектор поля реакций связей равен нулю, а второе, что и момент поля реакций равен нулю. В таком случае говорят, что система сил (поле реакций связей) эквивалентна нулю.
Согласно принципу освобождаемости от связей принцип Д’Аламбера—Лагранжа (1.2) для твердого тела имеет вид.
Соотношение (1.11) представляет принцип Д’Аламбера—Лагранжа для свободного твердого тела. Полагая в (1.11) 6а = 0 и учитывая произвольность вектора 6гр, получим теорему об изменении количества движения твердого тела.

Поскольку радиус-вектор центра масс твердого тела (точка О определяется равенством.
то соотношение (1.12) можно представить как теорему о движении центра масс твердого тела Мгс = F, где М — масса тела.
Если в равенстве (1.11) положить 8i> = 0, то, учитывая произвольность вектора 8а, получим теорему об изменении момента количеств движения. Имеем.

и далее согласно (1.12).
Равенство (1.13) выражает теорему об изменении момента количеств движения твердого тела относительно начала системы координат: производная момента количеств движения равна моменту внешних активных сил. Величины F, Л^(Г) называются соответственно главным вектором и главным моментом относительно точки О поля активных сил.
Равенство (1.13) останется справедливым, если в нем заменить вектор г на вектор г* = г — гс. При доказательстве этого факта следует учесть определение центра масс и теорему о движении центра масс. Таким образом, получим равенство.
выражающее теорему об изменении момента количеств движения относительно репера Кенига.