Байесовский подход к решению задач идентификации.
Фильтры Калмана
Оценка переменных состояния нелинейного химико-технологического объекта. Как уже упоминалось (см. § 5.1), задача оценки переменных состояния химико-технологического процесса, к которым можно отнести температуру, давление, составы фаз, расходы жидких и газообразных сред и т. д., состоит в том, чтобы по показаниям измерительных приборов, функционирующих в условиях случайных помех, восстановить… Читать ещё >
Байесовский подход к решению задач идентификации. Фильтры Калмана (реферат, курсовая, диплом, контрольная)
Статическая задача оценки переменных состояния. Рассмотрим существо данного подхода сначала на простом примере решения статической задачи оценки переменных состояния системы. Допустим, что уравнение наблюдения системы имеет вид 
где у — m-мерный вектор измерений; х — л-мерный вектор переменных состояния; v — вектор случайных помех измерений размерности (tfXl).
Полагаем, что априори известна (в аналитической форме) плотность совместного распределения р (х, v) случайных величин х и v. Требуется получить оценку? вектора х, «наилучшую» в указанном ниже смысле.
Центральное место в байесовском подходе к решению поставленной задачи занимает апостериорная плотность вероятности р (х J у) вектора х. Она характеризует степень знаний о векторе х.
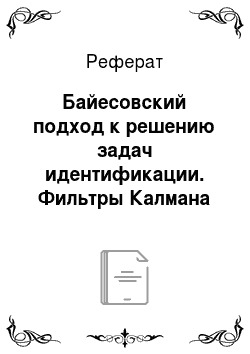
Рис. 8.5. Положение оценок различных типов на графике условной плотности распределения р {х!у) ?t — оценка по максимуму апостериорной вероятности; ?г — оценка по минимуму дисперсии; ?3 — оценка по минимуму ошибки после измерений у и содержит всю информацию, необходимую для оценки. Пользуясь р (х 1 у), можно вычислить оценку х для различных критериев оценивания. Приведем некоторые из них [71.
Критерий 1. Максимизировать вероятность того, что х=х. При этом решение задачи называется наиболее вероятной оценкой или байесовской оценкой по методу максимума правдоподобия или оценкой по максимуму апостериорной вероятности и является модой условного распределения р (х | у):

Критерий 2. Минимизировать j ]х — х ||2 /? (х | у) dx. Решение этой задачи называется оценкой по минимуму дисперсии и является средним значением распределения.

Критерий 3. Минимизировать максимум |х — х|. Решение называется оценкой по минимуму ошибки и является медианой распределения р (х | у):

Положение этих трех оценок на графике плотности распределения р (х | у) произвольного вида показано на рис. 8.5.
Решение задачи оценки осуществляется в четыре этапа. Этап 1. Вычисление плотности распределения р (у). Для этого используются данные о функции р (х, v) и уравнение наблюдения y=g (х, v). Функция р (у) находится либо в аналитическом виде, либо экспериментально (например, методом МонтеКарло) с последующей аппроксимацией с помощью стандартного распределения из некоторого семейства.
Этап 2. Вычисление двумерной плотности совместного распределения р (х, у). Предполагается, что уравнение наблюдения (8.21) таково, что существует обратное отображение.

с якобианом.
В этом случае по правилу преобразования плотности распределения случайных величин имеем [7].

Здесь, в частности, предполагается, что размерности векторов у и v совпадают. Случай неодинаковых размерностей указанных векторов рассмотрен, например, в книге 18].
Этап 3. Вычисление апостериорной плотности распределения р (х/у) вектора х. Это можно сделать либо непосредственно на основании пунктов 1 и 2 по определению условной плотности вероятности.

либо на основании формулы Байеса.

В последнем случае необходимо предварительно по информации о функции р (х, v) и уравнению наблюдения y=g (х, v) определить условную плотность распределения р (у/х) и безусловную плотность распределения р (х). Степень сложности реализации данного этапа в значительной мере зависит от вида плотностей распределения р (х, v) и р (v).
Этап 4. Вычисление оценки х. Этот этап выполняется на основании найденной апостериорной плотности распределения р (х|у) и принятого критерия качества оценки. Примеры возможных критериев и соответствующие решения указаны выше.
Пример 7. Задано линейное уравнение наблюдения.

где v — гауссовский шум о нулевым средним, причем переменные хну независимы, т. е. р (х, ) = р (х) р (у).
Сигналы х и v характеризуются соответствующими средними значениями и матрицами ковариации:

Решение задачи оценки вектора выполняем согласно ранее выделенным втапам.
1. Вычисление р (у). Пользуясь том, что х и у — независимые гауссовские случайные векторы, из уравнения наблюдения y = Cx-|-v сразу получаем:
р (у) = гауссовская плотность распределения;

2. Вычисление р (у, х). В данном случае матрица Якоби dg~l/dy является единичной, поэтому.

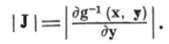
3. Вычисление р (х/у). По формуле вычисления условной плотности вероятности имеем.

или, учитывая равенства (8.22) — (8.23), получим  где
где 
4. Вычисление оценки St. В рассматриваемом случае апостериорная плотность вероятности р (х|у) является гауссовской. Поэтому оценки по всем трем вышеупомянутым критериям (максимуму апостериорной вероятности, минимуму дисперсии и минимуму ошибки) совпадают и равны условному среднему St=M [х/у].
Интересно отметить, что полученная оценка совпадает с оценкой параметров состояния линейной системы методом взвешенных наименьших квадратов при определенном выборе матриц весовых коэффициентов. Обычно оценка по методу наименьших квадратов состоит в выборе x=SL таким образом, чтобы минимизировать квадратичный функционал 
где в качестве весовых матриц выбираются матрицы V" 1 и V"1, обратные матрицам ковариаций Vx и V,. При этом если распределения величин х и v гауссовы, то? = Л/(х/у), что совпадает с байесовской оценкой по максимуму правдоподобия (или, что-то же, по максимуму апостериорной вероятности).
Задача оценки переменных состояния дискретной (многошаговой) системы. Нелинейная дискретная система формирования и наблюдения сигнала задается уравнениями: 
где х (к) — марковская последовательность вектора переменных состояния с измерениями у (к), зависящими от состояния х (к); w (к), v (&) — чисто случайные последовательности, т. е. р (w (fc-f-l)/w (&)]=р [w (&-И)]; р [v (АН-1)/v (?)]=/> (v (Л+1)1.
Будем решать задачу оценки вектора х с помощью байесовского подхода, существо которого состоит в использовании результатов измерения для улучшения знаний о текущем состоянии системы. Иными словами, после осуществления измерения переходят от априорной плотности распределения «гипотезы» р (х) к апостериорной плотности распределения р (х/у). В случае многошаговой динамической системы процедура улучшения повторяется всякий раз, когда делается измерение. При этом апостериорпая плотность распределения из предыдущего этапа становится для текущего этапа априорной плотностью распределения.
Обозначим через Y (к) совокупность измерений у (1), у (2), ….. ., у (А:),.. где целочисленные значения аргументов 1,2,.. ., Лг, … введены для обозначения соответствующих моментов времени tlt t2, в которые производятся изме рения. Формула пересчета плотностей распределения должна быть рекуррентной:

где символом «[?!» обозначен недостающий множитель, связывающий обе плотности распределения и подлежащий определению.
Используя марковское свойство последовательности х (к) и тот факт, что наблюдение у (к) зависит только от х (А;), можно на основании формулы Байеса левую часть выражения (8.24) представить в виде.
Для (А:-И)-го шага плотность распределения p lx (А:-И) | Y (Ar)) служит априорной плотностью распределения, которую можно обозначить р (х), а р (х (Ar-j-1) | Y (fc-f-l)l является апостериорной плотностью распределения и ее можно обозначить р (х | у). В этих обозначениях выражение (8.25) принимает явный вид формулы Байеса:

Теперь для построения рекуррентного соотношения (8.24) необходимо установить связь между плотностями распределения р [х (А-И) | Y (к)] и р [х (Ат) | Y (А;)). Эта связь является прямым следствием марковского свойства последовательности х (к):

Подставляя соотношение (8.26) в (8.25), получим искомую рекуррентную формулу, описывающую эволюцию условной плотности распределения состояния от одного шага к другому для марковской последовательности с наблюдениями, зависящими от состояния:
Фильтр Калмана для линейных дискретных систем. Уравнения состояния и наблюдения линейной дискретной системы, характеризующейся гауссовской марковской последовательностью состояний х (к), имеют вид.

где w (&), v (к) — р-мерный вектор входного шума и m-мерный вектор помех измерения соответственно (чисто случайные гауссовские последовательности); А (к) — (п X и)-матрица; С (&) — (т X ^-матрица; Г (к) — (п X р)-матрица.
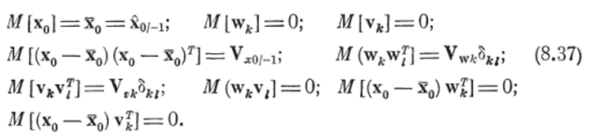
Кроме того, заданы следующие параметры априорных распределений: 

По условию задачи плотность распределения plx (/c-f-l)| Y (А:) 1 является гауссовской со средним значением X (&+1) и матрицей ковариаций Vx(/c-f 1). Поэтому, повторяя стандартную процедуру байесовского подхода, состоящую из четырех этапов (см. выше), нетрудно прийти к выводу о том, что плотность распределения р lx (&+1) | Y (/с-{-1)1 также является гауссовской со средним значением х (A:-f-l):

и матрицей ковариаций L (А: —1).

Остается получить явный вид выражений для X (&+1) и Vx(A:-f-l), входящих в соотношения (8.29) и (8.30). Для этого необходимо выполнить интегрирование в правой части равенства.
- (8.26). Это легко сделать, если учесть, что р[х (к) | Y (Л)1 есть гауссовская плотность со средним х (к) и матрицей ковариаций L (к), а р [х (fc-f-1) I Y (&)) — гауссовская плотность со средним X (&+1) и матрицей ковариаций L (к-f-1). Таким образом, результат, который получается после интегрирования выражения
- (8.26), можно записать сразу, если воспользоваться уравнением состояния (8.27):

Соотношения (8.29)—(8.32) представляют собой фильтр Калмана для линейных многошаговых дискретных процессов.
Анализ соотношений (8.29)—(8.32) позволяет сделать ряд замечаний о структуре фильтра.
Уравнения фильтра (8.29) и (8.31), по-существу, являются моделью системы (8.27), которая содержит поправочный член, пропорциональной разности между действительным измерением у (к) и его предсказанным значением С (к) х (к).
Матрица пропорциональности или весовая матрица L (Zc-f-l) C^V;1 (/с-М) в выражении коррекции (8.29) характеризует соотношение между неопределенностью состояния L (A:-j-l) и неопределенностью в измерениях v (к—1).
Соотношение (8.31) называют соотношением прогнозирования фильтра. Если х (к) — оценка, полученная из уравнений фильтра.
(8.29)—(8.32), то, подставляя ее в выражение (8.29), получим наилучший прогноз состояния на (А;4−1)-й шаг:

Из формул (8.30) и (8.32) видно, что изменение матрицы ковариаций ошибки оценки L (к) не зависит от измерений у (А:), т. е. прь известных параметрах априорных распределений матрицы L (к) (к=0, 1,2,…) можно вычислить заранее и запомнить.
Из соотношений (8.29) и (8.31) следует, что расчет улучшенной оценки производится только по текущим наблюдениям и матрице ковариаций ошибки. Это говорит о том, что фильтр может быть использован в режиме последовательной (непрерывной) идентификации в реальном масштабе времени.
Фильтр Калмаиа для нелинейных дискретных систем. В качестве примера такой системы рассмотрим многошаговый процесс, который характеризуется нелинейным уравнением состояния и нелинейным уравнением наблюдения, причем как на параметры состояния, так и на результаты измерений аддитивно накладываются чисто случайные шумы. Математическое описание системы имеет вид:

с заданными параметрами априорных распределений:
Отличие задачи (8.33)—(8.34) от задачи (8.27)—(8.28) состоит в том, что в данном случае функции fk (х (А:) 1 и gfc [х (А:) ] нелинейны.
В качестве одной из возможных конструкций фильтра для данной системы может служить модификация линейного фильтра, рассмотренного выше. Смысл модификации состоит в том, чтобы линеаризовать нелинейные функции f* и gk и затем вместо матриц, А (А:) и С (А;) в соотношения линейного фильтра подставлять линейные члены разложений соответствующих рядов Тейлора в окрестности решения задачи оценки. Эту линеаризацию можно выполнить двояко: либо относительно номинальной траектории системы, либо от шага к шагу относительно текущих оценок, начиная с априорных оценок, т. е. выполняя непрерывную релинеаризацию.
Таким образом, соотношения фильтра Калмана для нелинейной системы (8.33)—(8.34) повторяют соотношения (8.29)—(8.32) фильтра для линейной системы с учетом указанной модификации:

где.
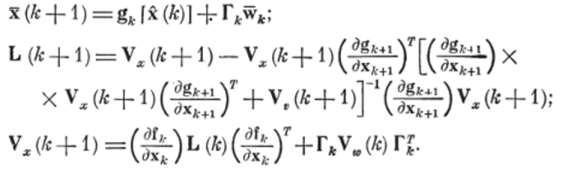
Как уже отмечалось, частные производные dfk/dxk и dgkfdxk можно вычислять либо относительно номинальной траектории, либо производную dfk/dxk вычислять при хк—хк, а производную dgk/dxk — при хк=Хк% т. е. осуществлять непрерывную релинеаризацию. В первом случае матрицы ковариации ЬА. и хк могут быть вычислены раз и навсегда. Во втором случае эти матрицы зависят от текущих оценок хк и должны рассчитываться последовательно от шага к шагу.
Заметим, что описанный прием линеаризации для конструирования нелинейных фильтров не всегда эффективен. Так, если начальные оценки слишком грубы или если возмущения настолько велики, что линеаризация приводит к неадекватному описанию системы, то резко повышается вероятность получить расходящееся решение.
Рассмотрим теперь методику применения фильтра Калмана для решения практических задач химической технологии.
Оценка переменных состояния нелинейного химико-технологического объекта [9]. Как уже упоминалось (см. § 5.1), задача оценки переменных состояния химико-технологического процесса, к которым можно отнести температуру, давление, составы фаз, расходы жидких и газообразных сред и т. д., состоит в том, чтобы по показаниям измерительных приборов, функционирующих в условиях случайных помех, восстановить значения переменных состояния системы, наиболее близкие в смысле заданного критерия к истинным значениям. Пусть химико-технологический процесс, протекающий в условиях случайных помех w, характеризуется я-мерным вектором состояний x=(xlt х2, …" х")т, r-мерным вектором управлений и=(н1, и2,.. иг)г, т-мерным вектором наблюдений y=(ylt у2,.. ., у1Л)т (по числу контрольноизмерительных приборов), причем на показания измерительных приборов накладывается шум v. Математическое описание процесса представляется в виде системы нелинейных дифференциальных уравнении:

где f, g — в общем случае пелннейные вектор-функции, вид которых определяется спецификой процесса; w, v — некоррелированные между собой случайные процессы (цептрированный гауссовский белый шум).
Постановка задачи. При заданном начальном векторе состояния х (*0)=х0 и значениях вектора наблюдения у в дискретные моменты времени у (/"), у (tx), …" у (/а-) требуется получить оптимальную оценку х вектора состояния х в указанные моменты времени (/0), (у,. .. , (fa). Для решения поставленной за дачи используем дискретный фильтр Калмана. С этой целью перейдем от непрерывной дифференциальной формы системы (8.35) к соответствующей нелинейной конечно-разностной системе:

где k — (tk), у* = у («*), u* = u {tk), w* = w (<*), k = v (tk), а индеке к пробегает значения к = 0, 1, 2,…, N.
Удобно ввести обозначение x*/fc для оценки вектора хк, полученной на основе наблюдений в течение предыдущего промежутка времени U0, tk 1.
Запишем в принятых обозначениях начальные условия, критерий оптимальности, рекуррентные соотношения прогнозирования и коррекции, определяющие алгоритм решения задачи оценки.
Начальные условия —.
Соотношения коррекции —.

Соотношения прогнозирования — 
Критерий оптимальности 
где.

Блок-схема алгоритма решения задачи (8.36)—(8.41) на ЦВМ показана на рис. 8.6.
Пример. Рассмотрим задачу оценки перемеппых состоянии проточного реактора с механическим перемешиванием и рубашкой охлаждения, в котором протекает необратимая экзотермическая реакция метаксилирования ортонитрохлорбензола, имеющая второй порядок при избытке СН3ОН (9J. Уравнения математической модели реактора имеют вид 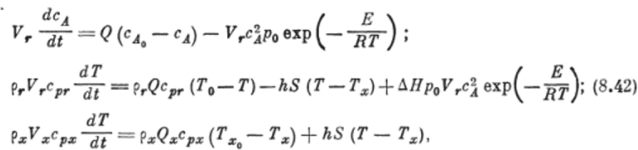
где сА — концентрация ортонитрохлорбензола; р0 — предэкспоненциальный множитель; Е, R — энергия активации и газовая постоянная; ДЯ — тепловой эффект реакции; V, Т, Q, р, Ср — объем, температура, объемный расход, плотность и теплоемкость соответственно; г, х, О — индексы, относящиеся к реакционной массе, хладоагенту и входному потоку соответственно; h — коэффициент теплопередачи; S — площадь теплообмена; t — время.
В качестве переменных состояния примем: хх =* {сА — Сдв)/Сдв> х2 — = (Т — Тв)/Тв, х3 = (Тх — ТХ0)(Тхе, а к переменным управления отнесем и«в (СА> — еА*)1ел$* «а = (Т'о — Иа = (^о — Txt)JTxe, где индексе относится к установившемуся состоянию процесса. Учитывая введенные переменные и принимая обозначения для производных &t=idz{ldx, i = = 1, 2, 3; т = {3/, где *3— масштабный множитель, приведем уравнения (8.42) к каноническому виду х = f (х, и) или в координатной форме.
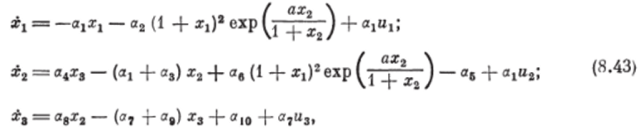
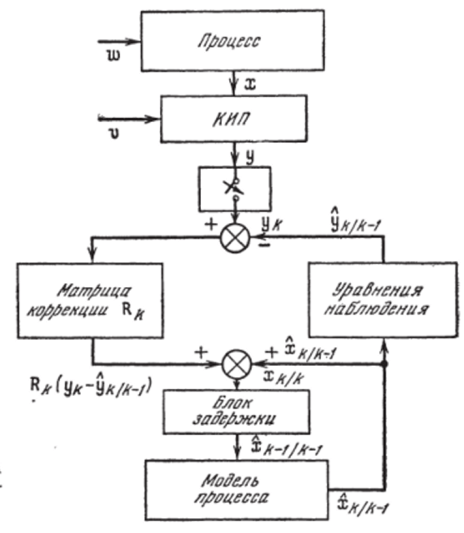
Рис. 8.7. Блок-схема работы фильтра в замкнутом контуре прямого цифрового управления процессом.
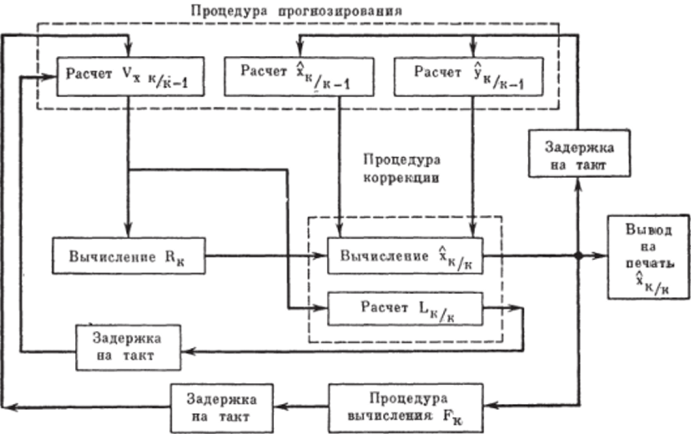
Рпс. 8.6. Блок-схема алгоритма решения задачи оценки где.
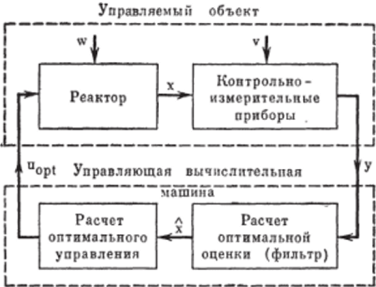
Допустим, что для рассматриваемого реактора решена задача синтеза оптимального управления u#pt, которое реализуется с помощью управляющей вычислительной машины (УВМ), так что реактор функционирует в замкнутом контуре прямого цифрового управления процессом (см. рис. 8.7). Для вепре;

Рпс. 8.8. Кривые наблюдении переменных состояния: I — ж*; 2 — х.
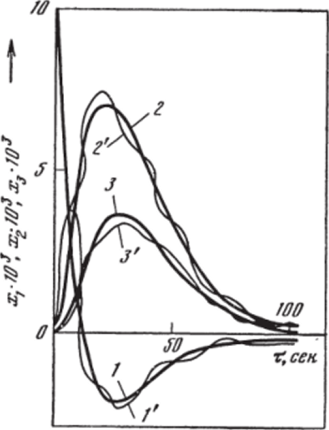
Рис. 8.9. Результаты расчета задачи оценки I — х,; V — 4,; 2 — х,; 2' — i,; з — х,; 3* — i,.
рывпого вычисления на УВМ вектора оптимального управления uopl необходимо располагать информацией о текущих значениях переменных состояния процесса; приведенной концентрации х, и двух приведенных температур — в реакторе х2 и хладоагента в рубашке охлаждения х3. Очевидно, регистрация переменных х2 и х3 не представляет труда, тогда как непрерывное измерение концентрации хх может быть сопряжено со значительными технологическими трудностями. Возникает задача получения оптимальной оценки переменной Х|, а также х2 и хз, причем как сам реакторный процесс, так и измерительные приборы работают в условиях случайных помех. Уравнения наблюдения для данной дипамической системы примут вид у = Gx + v, где G = (qq i)".
матрица наблюдений, у = (у2, у3)Г, x = (xlf х2, х3)т, v = (i>2, v3)T.
Решение задачи на ЦВМ «Минск-22» проводилось при следующих исходпых данных: р=1/240; а=15,35; 04=0,0461; а2=0,089; а3=0,0215; а4=0,0188; а&=0,0027; ав==0,784; а7=0,206; а8=0,14 105; о9=0,1237; а10=0,0178; 14=1,93; и2=—0,111; и3= —0,0865; V#fc =diag (0,01 0,01); V^^diag (1*10″4 1 • 10-* 1 • КГ4); Vi0/_1 = diag (0,01 0,01 0,01).
При начальном условии х1=0.1; х2=х3=0 кривые наблюдения переменных х2, х3 моделировалось путем численного интегрирования системы (8.43) н наложения экспериментального шума с помощью генератора случайных чисел (рис. 8.8). При этом допускалось, что случайные помехи могут искажать полезные сигпалы по температураам Т и Тх в пределах 10%.
Результирующие кривые оценки иоказапы на рис. 8.9. Видно, что всюду, кроме начального участка, точность оценки ненаблюдаемой переменной х, практически не уступает точности оценки наблюдаемых переменных х2, х3. Интересно отметить, что точность оценки переменных состояния практически пе изменялась при вариации величины случайных ошибок в показаниях контрольно-измерительной аппаратуры от Здо12%; значений элементов матриц ковариаций ошибок Vt*. и Ух0/_, (в пределах 10%) и начальных условий (в пределах 10%). Это свидетельствует об удовлетворительном функционировании алгоритма фильтрации при решении задач оценки в условиях небольших ошибок измерения параметров процесса.
Решение задачи идентификации модели нелинейного химикотехнологического процесса [10]. Построение адекватной модели технологического процесса предполагает адекватное отражение гидродинамической структуры потоков в аппарате и адеккватное описание кинетики процесса. В настоящее время решение первой задачи сводится в основном к обработке кривых отклика системы па типовое (импульсное, ступенчатое, гармоническое) или произвольное (детермипированное, случайное) возмущение по концентрации индикатора в потоке с использованием методов теории линейных систем автоматического регулирования. Эти методы, подробно рассмотренные выше, ограничиваются линейным случаем и не пригодны для решения нелинейных задач. Решение задачи идентификации линейных кинетических уравнений не представляет математических трудностей и ограничивается в основном использованием аппарата линейной алгебры.
Обычно идентификация нелинейных кинетических уравнений проводится в два этапа: 1) получение предварительных (нулевых) оценок кинетических констант; 2) уточнение кинетических констант. В настоящее время в литературе по химической кинетике получили распространение два способа уточнения кинетических констант.
Первый способ состоит в приведении дифференциальных кинетических уравнений к системе нелинейных алгебраических уравнений с последующей минимизацией среднеквадратичного критерия одним из методов нелинейного программировании, что в терминах теории динамических систем означает сведение динамической задачи идентификации к статической задаче наблюдения. При этом оперирование со скоростями химических реакций как с параметрами в статической задаче наблюдения осложняется значительными ошибками, неизбежно возникающими при экспериментальном определении скоростей химических реакций.
Второй способ состоит в минимизации среднеквадратичного критерия, в который входят не производные, а сами переменные состояния системы (концентрации, температуры и т. п.). В этом случае возникает необходимость решать исходную систему нелинейных дифференциальных уравнений столько раз, сколько делается шагов при движении к оптимуму, причем число этих шагов может достигать нескольких сотен. Ни первый, ни второй способ решения, но позволяют оцепить точность, с которой определяются кинетические константы, так как сами минимизируемые критерии не включают в себя этих кинетических констант.
Исследуем возможность определения кинетических констант нелинейного химического процесса на основе теории оптимальной фильтрации. В данном случае уравнения состояния и наблюдения системы имеют вид.

где a=(at, аг,.. at)T — вектор неизвестных постоянных параметров, остальные величины имеют тот же смысл, что и в задаче оценки (8.35).
Постановка задачи идентификации.
При заданном начальном векторе состояния х (f0)=x0, векторе нулевых оценок искомых констант а0=(а10, а20,.. ., а10)Т и значениях вектора наблюдения у в дискретные моменты времени у (t0), у (/j),.. ., у (tf/) требуется получить оптимальную в смысле среднеквадратичного критерия оценку, а вектора искомых констант, а в указанные моменты времени t0,. ., tK.
Сведем задачу идентификации к рассмотренной выше задачи оценки переменных состояний динамической системы. Примем искомые константы за дополнительные переменные состояния: *в+1=сп хп+2~а2* • • •? хп+1=ап так что вместо вектора х=(х11 х2,.. ., х") будем рассматривать расширенный вектор состояний x*=(xlt х2,.. ., хя> хп+1,.. ., яя+/)1, и вместо системы (8.44) получим уравнения состояния в виде.

где /*=/< при г=1, 2,.. ., п; /^=0 при i=n+1,.. ., п+1; у*=у< при t = 1, 2,.. ., m; у*=0 при i=m+1,.. ., n+l; g*=g,. при i=l, 2,.. ., m; g*=0 при i=m+1,.. ., m+l. Таким образом, задача идентификации сводится к задаче оценки переменных состояния в условиях неполного наблюдения: при заданном начальном векторе состояния х* (/0)=хI и значениях вектора наблюдения у* в дискретные моменты времени у* (/0),.. ., у*{tx) требуется получить оптимальную оценку х* вектора состояния х* в указанные моменты времени t0, tv …" tЛ-. Метод решения этой задачи, основанный на применении дискретного фильтра Калмана, изложен в предыдущей задаче. Блок-схема работы фильтра в режиме идентификации (или адаптации модели к процессу) представлена на рис. 8.10.
Пример. Рассмотрим задачу определения кинетических констант реакции 8-бром-5-нптро-1-нафтойной кислоты с гидроксил-ионом. Взаимодействие 8-галоген-5-нитро-1-пафтойной кислоты с водным раствором едкого Рис. 8.10. Блок-схема фильтра в режиме идентификации
натра, приводящее к образованию 8-оксп-5-нитро-1-нафтойной кислоты, подвержено сильному каталитическому влиянию соединения меди:
где Х=С1, Вг. Согласно механизму реакции, установленному В. А. Шуль Яншиным [И], кинетические уравнения имеют вид.
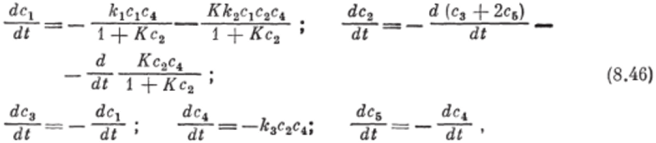
где сх — концентрация 8-бром-5-нитро-1-пафтойной кислоты; с2 — концентрация едкого натра; с3 — концентрация 8-окси-5-нитро-1-нафтойной кислоты; с4 — концентрация внесенного катализатора Cu (En)2S04; сь — концентрация побочного продукта Cu (En)2(OH)2; К — константа равновесия, равная 55 л-мол*1; kXt fcg, k3 — константы скорости, подлежащие определению. Для решения задачи идентификации введем следующие переменные состояния х1=С|, хг—сг, х3=с3, x4=c4t х5=с5, х9=кх, ^7=^2, xg=/r3. В принятых переменных система (8.46) приводится к каноническому виду (8.45) и задача идентификации сводится к задаче оценки в условиях неполного наблюдения: в кинетических экспериментах осуществлялась возможность измерения только концентрации elt с2, с3. Начальные значения координат расширенного вектора состояния системы, при которых решалась задача идентификации, и соответствующие экспериментальные значения конверсии приведены в табл. 8.1.
Начальная концентрация, моль/л: Cj (0)=1,04- 10~а; с2 (0)=3,132*10~г;
сз (0) = 0; с4 (0)=1,006*1(Г2; с5 (0)=0;
Таблица 8.1.
Время, мин 1. | 7 9. | |||||||
Конверсия, но Сх, % 7,0. | 15,3. | 22,1. | 30,8. | 37,5. | 50,1 60,4. | 68,9. | 75,6. | 85,4. |
с, (0)=0,976 • 10_а; с3 (0)=3,132 • 10″ *; с3 (0) = 0; с4 (0)=1,006 • 10~*; с* (0)=0; | ||||||||
Время, мин 5. | 30 40. | |||||||
Конверсия, но CIt о/о 11,5. | 21,0. | 30,5. | 38,5. | 46,3. | 53,5. 65,7. | 73,2. | 78,7. | 80,0. |
ci (0)=1,02−10″2; с3 (0)=20,62"10″2; с3 (0)=0; с4 (0)=1 ,(Ю6−10"*; с6 (0)=(). | ||||||||
Время, мин 10. | 60 70. | |||||||
Конверсия по Clt о/0 ю, 7. | 21,4. | 31,8. | 42,3. | 52,0. | 58,6 63,7. | 63,7. | 72,5. | 77,5. |
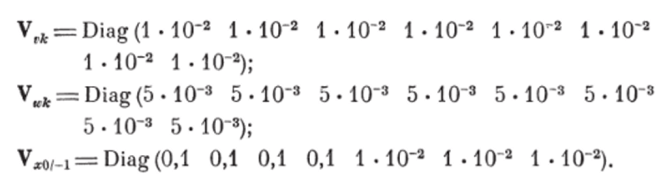
В качестве нулевых оценок вектора кинетических контапт использовались /с1== 11,5 мин-1, &2== 0,28 мин-1; *3=0,072 л/моль.мпн., а допустимый диапазон неопределенности модели составлял 10%. Задача решалась на ЦВМ «Минск-22». При расчете была принята следующая структура матриц ковариации ошибок:
Результаты расчета приведены на рис. 8.11 и 8.12. Видно, что качество оценки ненаблюдаемых концентраций веществ, участвующих в реакции, весьма удовлетворительное (ошибка не превышает 4%). Характер сходимости оцениваемых значений кинетических констант к истинным значениям, представленный на рис. 8.12, оставался практически идентичным для всех групп начальных условий, приведенных в табл. 8.1. Последнее служит подтверждением правильности обоснованного ранее механизма реакции. Удовлетворительная сходимость процедуры объясняется достаточно точным заданием нулевых оценок искомых констант. При ухудшении нулевых оценок резко повышается вероятность получения расходящегося решения.
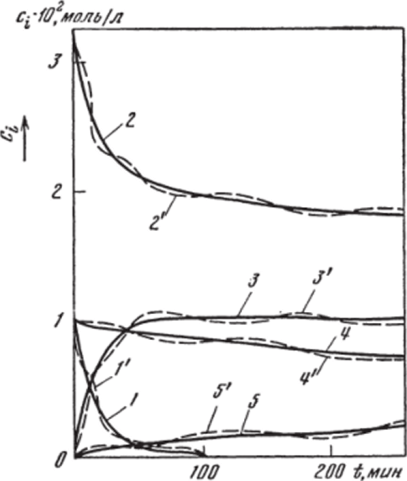
Рис. 8.11. Результаты расчета задачи оценки.
I — с, (О; s-е,"); 5-е, (о; 4 — •""): 5-е" (О; i' - г."); ^-«*1(0: 5' - (О; 4' - в4(о; у —»"").
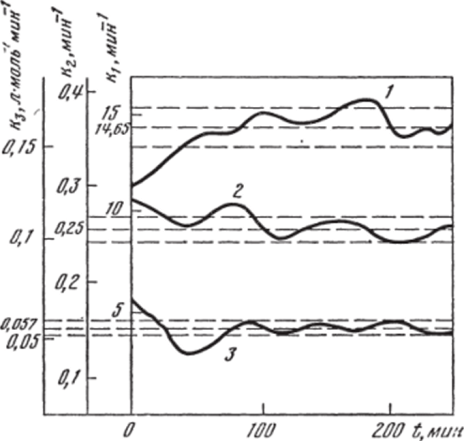
Рис. 8.12. Результаты расчета задачи идентификации.
1 ~ — Л| I а — л, — ht з — X, — k.