Динамические характеристики простых измерительных устройств
Кривая MRP (на рис. 13, б — прямая с, — 0) называемая гиперболой Вышнеградского, является границей устойчивости ИУ. Пунктирная кривая RD соответствует таким значениям параметров ИУ, при которых его переходная характеристика два раза последовательно касается границ трубки точности 1 ± А (см. рис. 14, г). В этом случае относительная длительность переходного процесса минимальна, т. е. т" = xnmin… Читать ещё >
Динамические характеристики простых измерительных устройств (реферат, курсовая, диплом, контрольная)
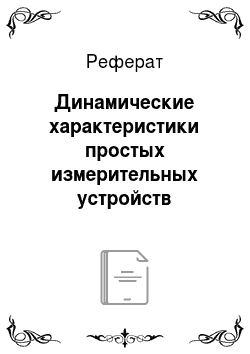
К простым измерительным устройствам относятся квазистатические ИУ первого, второго и третьего порядков. Передаточные функции таких ИУ имеют вид.
где а, (г = 0,1,2,3), Ь0 — коэффициенты дифференциального уравнения ИУ (5.2); К — коэффициент чувствительности ИУ; Т — постоянная времени, со0 = 1 /Т — собственная частота; Е, — относительный коэффициент демпфирования, А, В — параметры Вышнеградского.
Число коэффициентов передаточной функции, влияющих на показатели динамической точности простых ИУ, совпадает с порядком их характеристического уравнения п. Для ИУ первого порядка таким коэффициентом является постоянная времени Г, для ИУ второго порядка — собственная частота со0 (или постоянная времени Т = 1/со0) и относительный коэффициент демпфирования для И У третьего порядка — собственная частота ю0 и параметры Вышнеградского А, В. Коэффициент чувствительности К на показатели динамической точности ИУ не влияет.
Если известны коэффициенты дифференциального уравнения рассматриваемых ИУ (5.2), то коэффициенты их передаточной функции равны.

Зная эти коэффициенты, можно определить все (полные и частные) динамические характеристики ИУ.
Динамические характеристики простых измерительных устройств первого порядка В табл. 2 приведены динамические характеристики ИУ первого порядка. Из этих данных следует:
- 1) в простых ИУ первого порядка возможны только монотонный переходный процесс и только пологая АЧХ;
- 2) длительность переходного процесса ?п пропорциональна постоянной времени Т, ширина полосы пропускания частот шп обратно пропорциональна Т, минимум ИКОП Imin = 0 достигается при Т = 0+, а минимум ОБИКОП L, =Т— при Т = Т-
иитш с х tr.
3) обычная и активная длительности переходного процесса совпадают, если величины k и Д связаны соотношением.
Динамические характеристики простых ИУ первого порядка
№. | Динамическая характеристика. | Формула. |
Дифференциальное уравнение. | Ту + у = Кх | |
Относительная передаточная функция. | Щр)=Тр + 1 | |
Относительная переходная функция. | «-*•. 'w'. II. СЪ. | |
Относительная весовая функция. | /—V. т. и. •с? | |
Относительная амплитудная частотная функция. | > II. Ю. | |
Фазовая частотная функция. | ф (со) =-arctg (cor). | |
Длительность переходного процесса. | ?"=7−1п (1/Д). | |
Активная длительность переходного процесса. | ?a=rin (l/VT^>). | |
Перерегулирование. | а = 0. | |
Полоса пропускания частот. | 1 у]е (2-е) Т 1-е. | |
Интегральная квадратичная оценка. | 1= Т/2 | |
Обобщенная интегральная квадратичная оценка. | _Т2+Т2 06 2Т |

Таблица 2
Динамические характеристики простых измерительных устройств
второго порядка
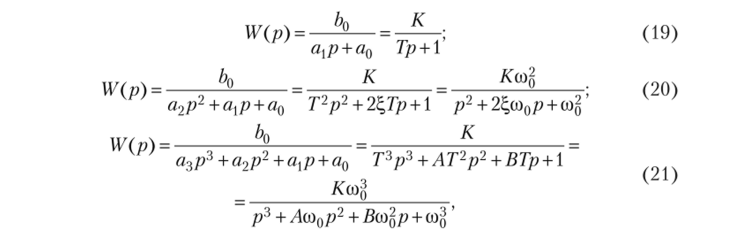
В табл. 3 приведены полные динамические характеристики простых ИУ второго порядка.
Анализ приведенных данных позволяет сделать следующие выводы:
- 1) собственная частота простых ИУ второго порядка со0 не влияет на форму переходного процесса и форму АЧХ. При увеличении со0 переходная характеристика ИУ /%(?) сжимается, а при уменьшении — растягивается вдоль оси абсцисс, сохраняя свою форму. АЧХ ДДш), наоборот, при увеличении со0 растягивается, а при уменьшении ш0 — сжимается, также сохраняя свою форму;
- 2) относительный коэффициент демпфирования ?, напротив, существенно влияет на форму переходного процесса и АЧХ.
Это влияние демонстрируется графиками, показанными на рис. 1.
Таблица 3
Полные динамические характеристики простых ИУ второго порядка.
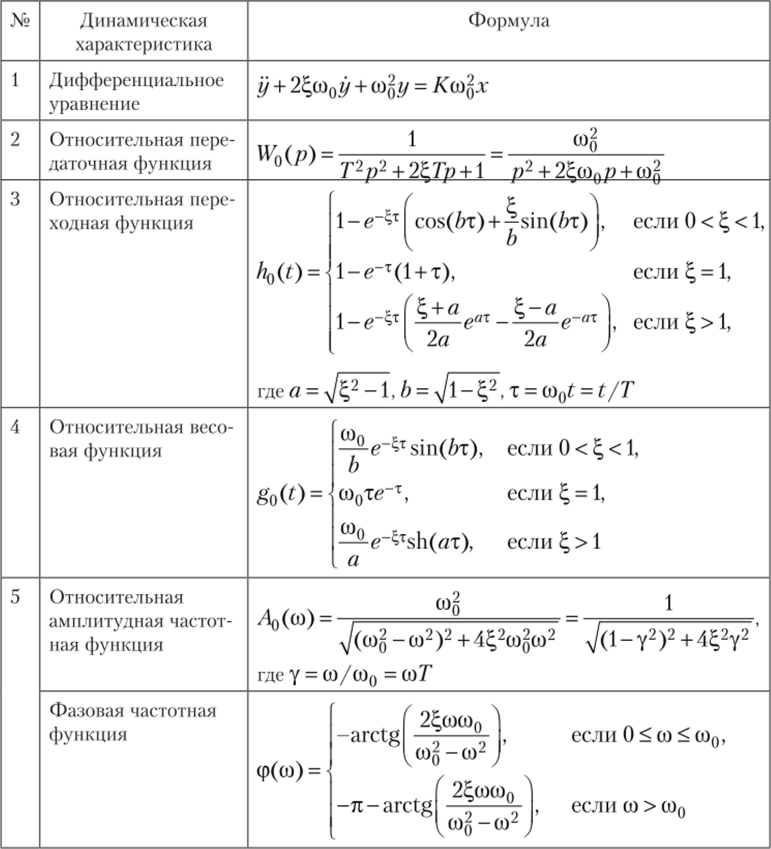
Переходный процесс колебательный, если 0% > 1. Существует такое значение относительного коэффициента демпфирования Е, =опт при котором переходная характеристика ИУ в точке своего максимума касается верхней границы трубки точности 1 + Д (см. рис. 1, б). В этом случае относительная длительность переходного процесса тп = (Oq^ii минимальна, т. е. тп =TIimin.
Рис. 1.
АЧХ пологая, если ?, > 1/V2, и одногорбая резонансная, если 0 <? < 1/V2. Существует такое значение? = < 1/V2, при котором АЧХ в точке своего
максимума касается верхней границы трубки точности 1 + е (см. рис. 1, д). В этом случае относительная ширина полосы пропускания частот Yu =(0п/со0 максимальна, т. е. уп = Yumax;
Длительность переходного процесса tn вычисляется по формуле

где тп = т"(?, Д) — безразмерная относительная ДПП, зависящая только от ^ и Д.
Для вычисления тп нужно, полагая О)0 = 1с-1, построить график относительной переходной функции ИУ /?0(т), соответствующий заданному значению? (см. формулы п. 3 табл. 3), и, наложив на него трубку точности 1 + Д, определить такое значение т, при котором этот график последний раз пересекается с границами трубки точности 1 + Д (см. рис. 5.10 (гл. 5)). Найденное значение т равно тп.
Приближенное значение относительной длительности переходного процесса тп можно вычислить по формулам, вид которых зависит от значения относительного коэффициента демпфирования 1) если то.
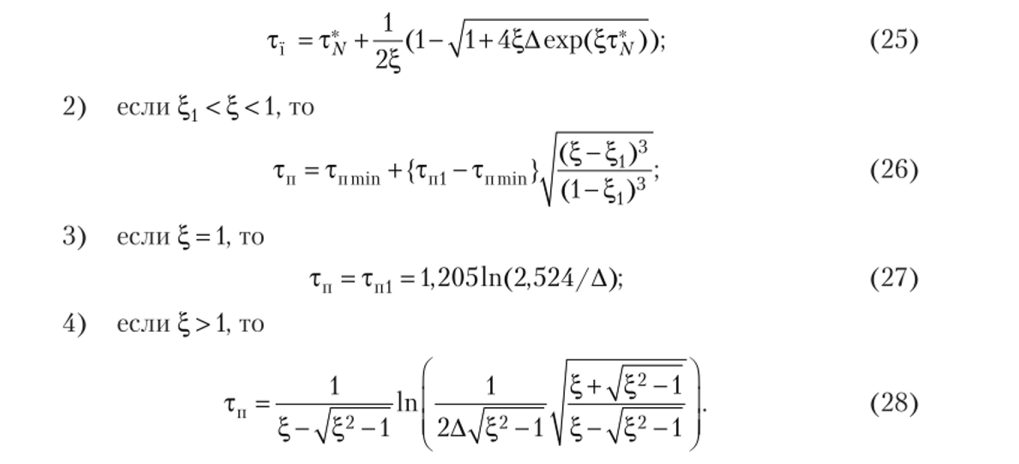
В этих формулах используются следующие обозначения:
где N — порядковый номер первого экстремума относительной переходной характеристики ИУ, не выходящего за границы трубки точности 1 + Д. Его можно вычислить по формуле.

где E+z означает округление величины z в большую сторону до получения целого числа (например, Е [ 1,2] = 2, Е+7/2] = 4 и т. д., для графика на рис. 5.10 (гл. 5) N = 3); тп min — минимальная относительная ДПП, приближенное значение которой можно вычислять по формуле (25), где в этом случае нужно принять? = и N = 1.
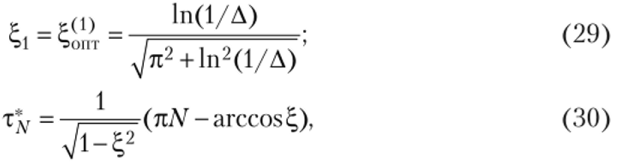
На рис. 2 показан типичный график зависимости тп от Величина тп минимальна при определенном оптимальном значении относительного коэффициента демпфирования < 1, зависящем от, А (см. (29)).
Соответствующая относительная переходная характеристика И У показана на рис. 3 (кривая 1). В точке максимума она касается верхней границы трубки точности 1 + А. Если то максимум переходной характеристики выходит за границу 1 + А трубки точности (см. кривую 2 на рис. 3), и напротив, если? > то он находится внутри этой трубки (см. кривую 3 на рис. 3).
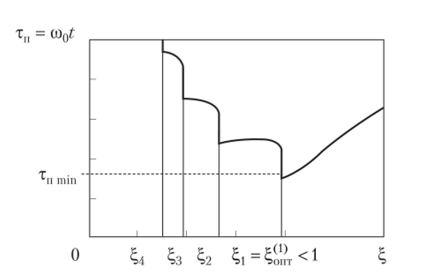
Рис. 2.
В обоих случаях точки т = т1|2 и т = т||3, в которых переходная характеристику И У последний раз пересекается с границами трубки точности, смещаются вправо, т. е. величина тп увеличивается.
В точках.

зависимость тм от имеет разрывы первого рода (см. рис. 2).
Рис. 3.
В этих случаях переходная характеристика ИУ в точках xq = пqf ф-t,2 касается границы [1 — (—1)^Д] трубки точности (рис. 4). Поэтому условие? <? приводит к скачкообразному увеличению тп.
Активная длительность переходного процесса (АДПП) tA определяется из уравнения (5.66). Для простого ИУ второго порядка это уравнение приводится к виду 
где b = yj 1-?2, тА =со0/:А — относительная АДПП. Решая это уравнение, можно для заданных значений Е, и k определить тА.
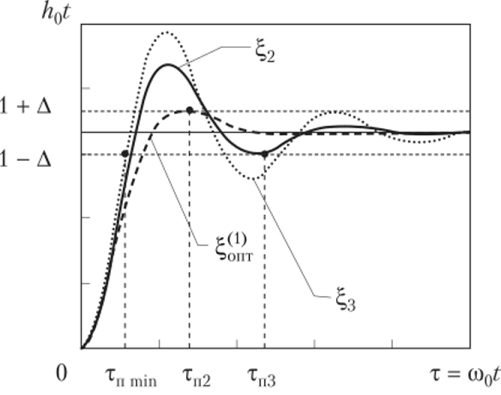
Рис. 4.
Расчет обычной ДПП тп и активной ДПП тА дает близкие результаты, если величины /е и, А связаны соотношением (23). На рис. 5, а показаны графики зависимости тп от Е, для трех значений A: Aj =0,1, А2 =0,05 и Д3 =0,03, на рис. 5, б — графики зависимости тА от для трех соответствующих (вычисленных по формуле (23)) значений коэффициента k: kx =0,9900, k2 = 0,9975 и k3 = 0,9991. *.
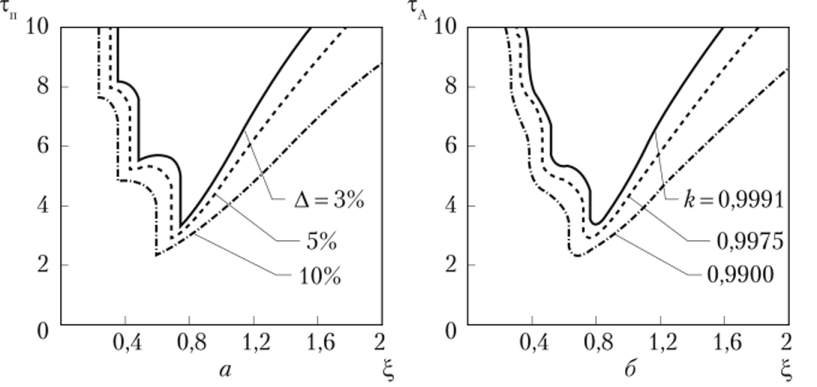
Рис. 5.
Перерегулирование а характеризует максимальное отклонение относительной переходной характеристики И У от установившегося единичного уровня. В простом ИУ второго порядка перерегулирование зависит только от значения относительного коэффициента демпфирования Е, и вычисляется по формуле.

С ростом ?, перерегулирование монотонно уменьшается вплоть до значения, а = 0 при? = 1. Если 4 > 1, го равенство, а = 0 сохраняется, так как в этом случае переходный процесс становится монотонным.
Если 0 <? < 1, то переходный процесс является колебательным. На рис. 6 показаны характерные точки соответствующей относительной переходной характеристики И У.

где b — ф-с,2 .Такими точками являются: точки экстремумов xt, т2,…, точки пересечения графика с установившимся единичным уровнем т], Т2,… и две точки А, В на переднем фронте переходного процесса.
Координаты всех этих точек можно вычислить (зная только значение <;) по следующим формулам:
- • абсциссы точек экстремумов — т = —q, где b = J 1-i;2, q = 1,2, 3,…;
- 1 b
- • ординаты точек экстремумов — Hq = 1 + (-1)'?+1 a’i;
- • абсциссы точек пересечений с единичным уровнем т* = т -^-arccos^;
- 1 1 b
- • пиковые отклонения от единичного уровня a(j =
. т, , (% [а
- • координаты точки А — хл =-?, пА =1- 1 ;
- • координаты точки В: хв =—, hB = 1 -уТа.
- 2 b
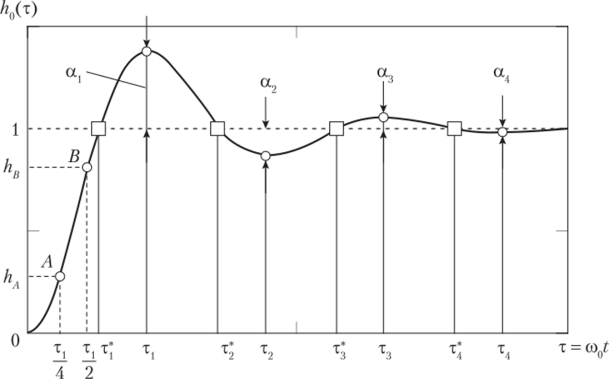
Рис. 6
С помощью этих формул несложно вручную построить переходную характеристику простого И У второго порядка, соответствующую заданному значению относительного коэффициента демпфирования 0.
Частотные динамические характеристики. На рис. 7, а показано семейство АЧХ, на рис. 1,6 — семейство ФЧХ, на рис. 7, в — семейство АФЧХ простого ИУ второго порядка.
Все графики соответствуют единичному значению собственной частоты ИУ со0 = 1с-1 и трем различным значениям относительного коэффициента демпфирования? = 0,2,? = 0,5 и? = 1,5. Если 0 <? < 1 /л/2, то АЧХ имеет резонансный пик, причем, чем меньше ?, тем этот пик острее. Точка максимума АЧХ соответствует резонансной частоте сор =o)0'S/l-2?2. Соответствующее максимальное значение относительной амплитуды установившегося выходного сигнала равно АР
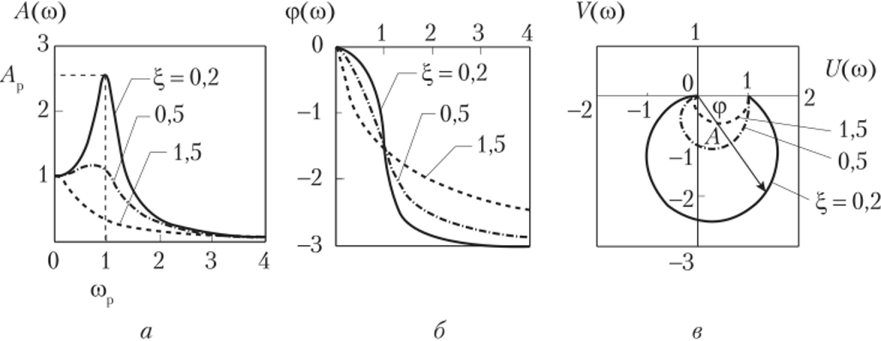
Рис. 7.
Ширина полосы пропускания частот простого И У второго порядка вычисляется по формуле.

где уп =уп(?, в) — безразмерная относительная ширина ППЧ, зависящая только от? и в. Из формулы (36) следует, что величина уп = а)п/а)0 (для заданных значений? и в) совпадает с шириной ППЧ простого ИУ второго порядка, у которого собственная частота равна единице, т. е. со0 = 1 с-1.
Для простого И У второго порядка.

где ?^т — оптимальное значение относительного коэффициента демпфирования, при котором относительная ширина ППЧ максимальна. Его можно вычислить по формуле.

Соответствующее максимальное значение относительной ширины ППЧ равно.

11а рис. 8 показан типичный график зависимости у" от Видно, что этот график состоит из двух ветвей (соответствующих формулам (37)) и имеет характерный разрыв в точке? = ?опт> справа от которой уп =уптах. Слева ОТ этой точки у, = Y, ii = ^/l-(1 + е)-2 — Если? = 0, то Yn = Y"o = Ve/(1 + e);

Рис. 8.
На рис. 9 показан график оптимальной АЧХ простого ИУ второго порядка (кривая 1). В точке своего максимума он касается границы 1 + е. В результате относительная ширина полосы ППЧ уп принимает максимально возможное (для заданных ?, и е) значение у" = уи шах. Если? то экстремум АЧХ выходит за верхнюю границу трубки точности (см. кривую 2 на рис. 9), так как в этом случае Ар > 1 + е и, напротив, если ?, > то Ар < 1 + 8 (см. кривую 3 на рис. 9). В обоих случаях точка первого выхода АЧХ за границы трубки точности смещается влево, т.с. ширина ППЧ уменьшается.
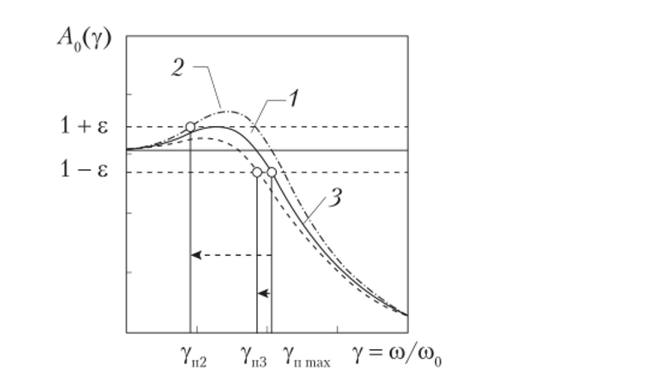
Рис. 9.
Интегральные показатели качества переходного процесса. Интегральная квадратичная оценка переходного процесса (5.67) для простого И У второго порядка вычисляется по формуле.

Исследование этой функции двух переменных на наличие экстремума (минимума) в области устойчивости ?>0, со0 >0 позволяет сделать следующие выводы:
- 1) ИКОП обратно пропорциональна собственной частоте ИУ со0, т. е. чем больше 0)0* тем меньше ИКОП;
- 2) при любом заданном значении собственной частоты ИУ со0 существует оптимальное значение относительного коэффициента демпфирования ?^т = ОД при котором ИКОП минимальна (в этом случае /min = 1/со0).
На рис. 10 показаны графики соответствующих переходных процессов для трех значений собственной частоты ИУ: со0 = 1 с-1 (сплошная кривая), О)0 =2с-1 (пунктирная кривая) и сл)0 =3с-1 (штрих-пунктирная кривая).
Очевидно, что при увеличении О)0 происходит сжимание (а при уменьшении со0 — растягивание) этих графиков вдоль оси абсцисс при сохранении их формы. Стремление приблизить фактический переходный процесс к идеальному ступенчатому переходному процессу (за счет снижения ИКОП) приводит к нежелательному перерегулированию, а = 16,3% и колебательности оптимального переходного процесса. В этом проявляется главный недостаток ИКОП.
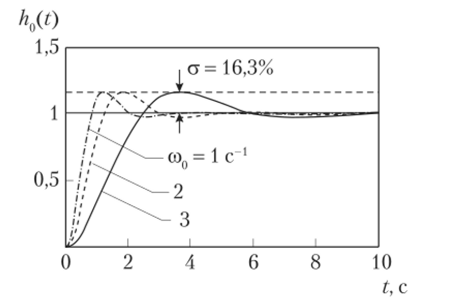
Рис. 10.
Обобщенная интегральная квадратичная оценка для простого ИУ второго порядка вычисляется, но формуле.

Исследование этой функции на наличие минимума в области со0>0 и? > 0 позволяет сделать следующие выводы:
1) для каждого значения Те> 0 существуют такие значения ?>0,5 и со0 > 0, при которых значение ОБИКОП (41) оказывается минимальным.
Соответствующие значения ?, > 0,5, со0 и Те должны быть связаны соотношением.

2) чем больше собственная частота ИУ со0, тем больше относительный коэффициент демпфирования %, меньше значение ОБИКОП и тем ближе расположены один относительно другого графики фактического и экстремального переходных процессов ИУ.
На рис. 11 эти графики показаны для случая Те = 1 с и ряда значений со0 и t, вычисленных в соответствии с формулой (42). С ростом собственной частоты ИУ ш0 графики фактических переходных процессов приближаются к графику экстремального переходного процесса.
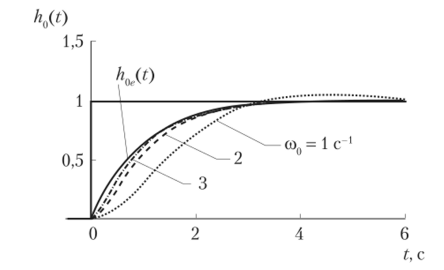
Рис. 11.
Динамические характеристики измерительного устройства третьего порядка
Передаточная функция. Простое измерительное устройство третьего порядка обычно образуется в результате последовательного соединения инерционного и колебательного звеньев, например, инерционного датчика первичной информации и стрелочного отсчегного устройства (рис. 12). В этом случае передаточная функция ИУ имеет вид.

где К = К{К2. Примером такого ИУ является терморезисторный термометр, рассмотренный в параграфе 3.3.

Рис. 12.
В общем случае передаточная функция простого И У третьего порядка имеет вид где К — коэффициент чувствительности ИУ; ы>0 — собственная частота; А, В — параметры Вышнеградского; Т = 1 /со0 — постоянная времени ИУ.
Переход от одной формы записи передаточной функции ИУ (43) к другой форме (44) осуществляется с помощью формул, связывающих параметры А, В, со0 с параметрами Ти Т2, % и наоборот. Если известны параметры 1,Т2 и ?, то соответствующие значения параметров А, В и со0 можно вычислить по формулам.

Наоборот, если известны А, В и (% то 7', Т> и вычисляются по формулам.

где Q = — = •Jcp, q — положительный вещественный корень кубического уравнения.


Например, если Г, = 1 с, Т2 =2 с и^ = 0,5, то Л = 2,38, В = 1,89 и со0 = 0,63 с-1. Представление передаточной функции простого ИУ третьего порядка в форме (43) возможно во всех случаях. Однако указанные выше звенья такого И У могут оказаться виртуальными, т. е. не имеющими конкретного физического исполнения в приборе. В этих случаях схему на рис. 12 нужно рассматривать как эквивалентную структурную схему простого И У третьего порядка. В любом случае операторная часть его передаточной функции W0(p) содержит три коэффициента: со0, Л, В (или Г, Т2, ?), которые влияют на показатели динамической точности ИУ.
Переходная функция. Диаграмма Вышнеградского. Переходную функцию простого измерительного устройства третьего порядка можно получить как реакцию второго звена структурной схемы ИУ, показанной на рис. 12, на выходной сигнал первого звена у,(t) — (1 — ехр (-Г/7,)) • 1(f), соотвстствующий единичному входному сигналу x (t) — 1(f). В результате получим:
1) если 0<4<1, то.
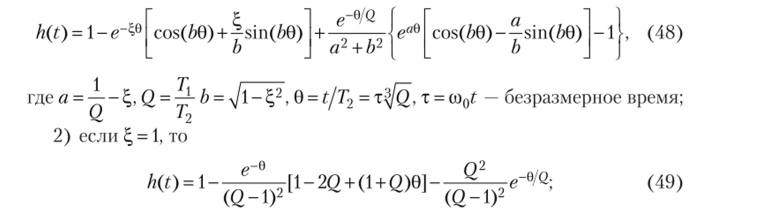
где с = л]Е,2-1, cosh (2) = (ez + е~г)/2, s h (z)-(ez-e~z)/2.
Отсюда следует, что форма переходной характеристики простого ИУ третьего порядка зависит только от параметров Е, и Q, или, учитывая формулы (45), — только от параметров Вышнеградского А, В.
На рис. 13, а показана диаграмма Вышнеградского. С ее помощью удобно исследовать влияние корней характеристического уравнения простого ИУ третьего порядка на форму переходной характеристики такого ИУ.
На рис. 13, б показан вид этой диаграммы в плоскости параметров Q. На обеих диаграммах выделены три области 1, 2, 3, соответствующие разным сочетаниям корней характеристического уравнения ИУ.

Рис. 13.

Уравнения границ этих областей приведены в табл. 4. Им соответствуют разные формы переходного процесса (рис. 14).
В областях 1 и 2 уравнение (51) имеет один отрицательный вещественный корень Л,<0 и два комплексно-сопряженных корня А.23=-сх±т) (а>0, ш>0). В области 1 выполняется условие а>|А.,|. В этом случае апериодическая составляющая переходного процесса ехр (Я, т) затухает быстрее, чем колебательная составляющая ехр (-а + /'со)т. Поэтому для этой области характерен колебательный переходный процесс, подобный показанному на рис. 14, а.
В области 2, напротив, ос < |Л. j|, что соответствует монотонно-периодическому переходному процессу (см. рис. 14, б). В области 3 все корни действительные, отрицательные и разные. Поэтому переходный процесс, соответствующий этой области, является монотонным (см. рис. 14, в).
Таблица 4
Уравнения границ областей диаграммы Вышнеградского.
Обозначение границы. | Уравнение границы. | |
В плоскости А, В | В плоскости Q | |
MRP | В = 1 /а, А > 0. | 5 = о. |
CD | В = -А2±, 0<�А<3 9 А | Q= 1Д. о<5<1. |
DE, DF | (АВ)2 -4(А3 + В3)+18АВ-27 = 0, Л > 3. | 5=1. |
Кривая MRP (на рис. 13, б — прямая с, — 0) называемая гиперболой Вышнеградского, является границей устойчивости ИУ. Пунктирная кривая RD соответствует таким значениям параметров ИУ, при которых его переходная характеристика два раза последовательно касается границ трубки точности 1 ± А (см. рис. 14, г). В этом случае относительная длительность переходного процесса минимальна, т. е. т" = xnmin. Каждой точке на этой кривой соответствует определенное значение максимальной относительной переходной погрешности Д, причем по мере приближения к точке D оно уменьшается, а значение xnmin возрастает.
Из рис. 13, б и формул правого столбца табл. 4 следует, что в простом ИУ третьего порядка переходный процесс монотонный, если Q>0, ?>1, колебательный, если 0 < Q < 1/?, 0 < с < 1 и монотонно-периодический, если.
Q > 1/5, 0<5<1;
Примечание: утверждения о форме переходного процесса ИУ относятся к точкам, достаточно удаленным от границ областей диаграммы Вышнеградского, так как вблизи этих границ особенности формы переходной характеристики И У выражены слабо.
Если 0,1%<�Д<5%, то уравнение кривой RD с достаточной для практики точностью аппроксимируется выражениями.

или в области параметров 5, Q

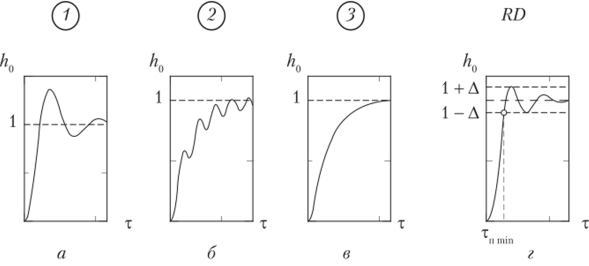
Рис. 14.
Активная длительность переходного процесса. По формуле (7.19) для простого измерительного устройства третьего порядка получим.


или в координатах Е, Q

Вычисляя интеграл в левой части уравнения (5.66) и решая это уравнение, можно определить активную длительность переходного процесса tA, соответствующую заданным значениям параметров Вышнеградского А, В или заданным значениям параметров Е, Q. Существуют оптимальные значения этих параметров, при которых АДПП минимальна [301.
Частотные характеристики. Относительная АЧХ простого измерительного устройства третьего порядка имеет вид.

где у = оо/о)0 — относительная частота. Если передаточная функция ИУ задана в форме (43), то удобнее пользоваться другим выражением:

где N = l/^Q2, Q = T /Т2.
Из этих формул видно, что форма АЧХ простого ИУ третьего порядка зависит только от двух параметров: А, В или Q.
На рис. 15 показаны диаграммы, иллюстрирующие эту зависимость.
Диаграмма на рис. 15, а построена в плоскости параметров Вышнеградского А, В, диаграмма на рис. 15, 6 — в плоскости параметров Е, Q.
Координаты характерных точек диаграмм: для рис. 15, а — iV (2-1/3, 21/3), D{2,2), G (3,61/2), для рис. 15, 6 — N (0,21/2), D{2~ 1), G (2-V2, 0).
На обеих диаграммах выделены четыре области 1,2,4,6, каждая из которых соответствует определенной форме АЧХ (рис. 16). Уравнения границ этих областей приведены в табл. 5.
Если параметры ИУ таковы, что точка (А, В) (или, соответственно, точка (?, Q)) попадает в области 1, 2,4, 6 или на границы 3,5 этих областей, то форма АЧХ ИУ будет такой, как показано на рис 16. На этом рисунке кривая 1 соответствует одногорбой резонансной АЧХ, кривые 2,3,4 — двугорбым АЧХ (с разным соотношением горбов), кривая 5 — стулообразной АЧХ, а кривая 6 — пологой АЧХ.
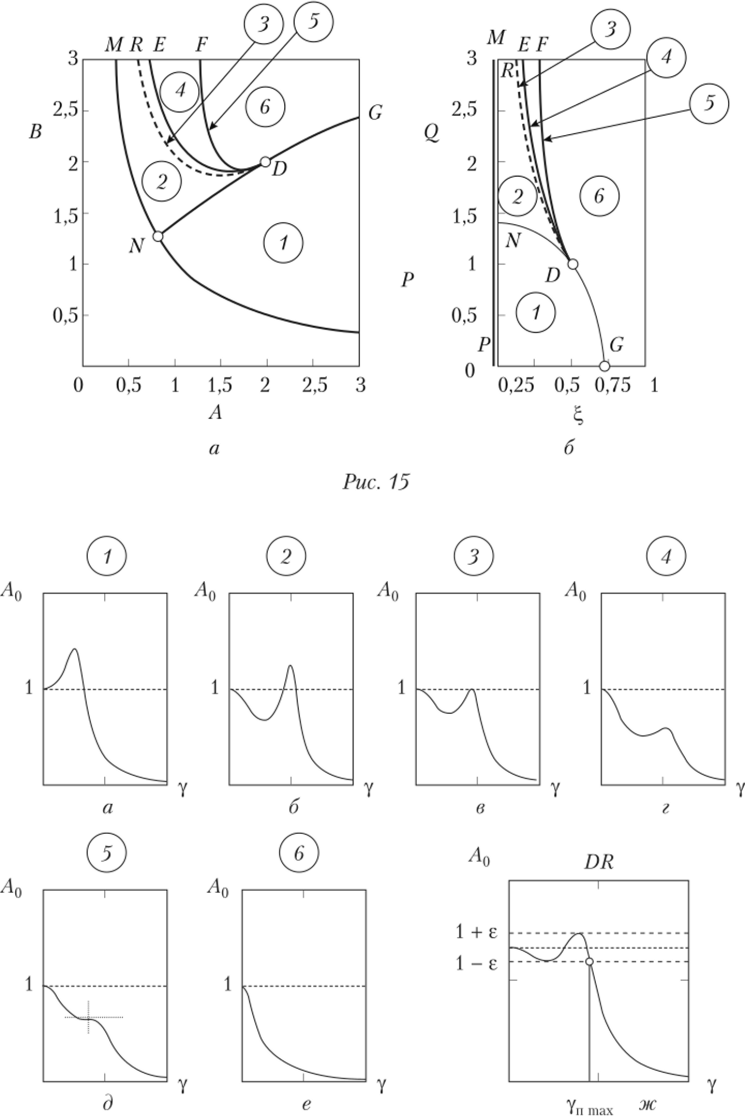
Рис. 16.
Пунктирная кривая RD соответствует таким значениям параметров ИУ, при которых АЧХ два раза последовательно касается границ трубки точности 1 ± 8 (рис. 16, ж). В этом случае относительная ширина ППЧ простого ИУ третьего порядка максимальна, т. е. у" = уптах. Каждой точке на этой кривой соответствует определенное значение максимальной относительной частотной погрешности е, причем, но мере приближения к точке D эта погрешность и значение уптах уменьшаются.
Таблица 5
Уравнения границ областей частотной диаграммы.
Обозначение границы. | Уравнение границы. | |
В плоскости параметров Л, В | В плоскости параметров i;, Q | |
MNP | В = -, Л>0 А | Z = o |
ED | Л2 О. В = —+~, 0 < Л < 2 4 А | Q = -t. оъ 2. |
ED | (В — 2Л)2 = ЗЛ (Л3 — 2), Л > $ 2 | 4 =и2 + 8(Я_2,/12(У-3,()>1. |
NDG | В = л/2Л, Л > 1/З/2. | Q = ]2-4?2, 0 <? < 1/V2. |
Если 0,4%<�е<4%, то соответствующие участки кривой RD с достаточной для практики точностью аппроксимируются в выражения.


В этом случае Интегральные показатели качества переходного процесса. Интегральная квадратичная оценка переходного процесса (5.67) для простого измерительного устройства третьего порядка вычисляется по формуле.

Эта функция имеет минимум /mjn =3/2со0, если А-1, В = 2. Чем выше собственная частота ИУ со0, тем меньше значение ИКОП.
На рис. 17 показано семейство переходных характеристик, соответствующих А = 1, В = 2 и различным значениям собственной частоты ИУ со0 = 1,2,3 с-1.
Видно, что стремление приблизить переходный процесс к идеальному скачку приводит к заметному перерегулированию и нежелательной колебательности переходного процесса, которые с ростом со0 не уменьшаются.
![Обобщенная интегральная квадратичная оценка переходного процесса (5.68) для простого ИУ третьего порядка вычисляется по формуле где те = щТе — безразмерная постоянная времени экстремального переходного процесса h^e(t) = [l-exp(-t/Te)] ? 1(?). В точке минимума аргументы этой функции связаны следующими соотношениями:](/img/s/8/57/1445957_52.png)
Обобщенная интегральная квадратичная оценка переходного процесса (5.68) для простого ИУ третьего порядка вычисляется по формуле где те = щТе — безразмерная постоянная времени экстремального переходного процесса h^e(t) = [l-exp (-t/Te)]? 1(?). В точке минимума аргументы этой функции связаны следующими соотношениями:
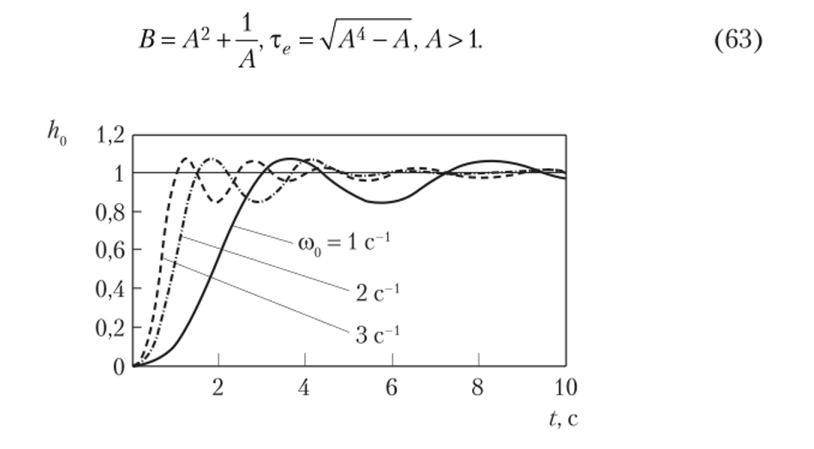
Рис. 17.
Соответствующее минимальное значение ОБИКОП (62) равно

Необходимое значение постоянной времени Те можно определить из условия получения желаемой длительности переходного процесса tn = ?пж. В этом случае.

Чем выше собственная частота ИУ со0, тем точнее выполняется это соотношение.
Таким образом, для каждого значения собственной частоты простого И У третьего порядка (о0 существуют такие значения параметров Вышнеградского А, В (и, значит, такие параметры ИУ), при которых величина ОБИКОП минимальна. Чем больше собственная частота ИУ, тем меньше минимальное значение ОБИКОП и тем ближе расположены друг к другу графики фактического и экстремального переходных процессов.
В табл. 6 для случая Тв = 1с приведены оптимальные значения параметров Вышнеградского для ряда значений собственной частоты ИУ 0)0 = 1> 2,3,4,5 с-1. Для каждого из них показано соответствующее минимальное значение ОБИКОП /06min и максимальное отклонение 8тах фактического переходного процесса от экстремального переходного процесса. В трех правых столбцах этой таблицы приведены соответствующие значения постоянных времени Т{, Т2 и относительного коэффициента демпфирования ИУ? эквивалентной передаточной функции ИУ (43).
Таблица в
Параметры передаточной функции простого ИУ третьего порядка, оптимизированные по критерию /об = /o6min
со0, С-1 | А | В | ^o6min. | *тах. | Tv с. | Т2. с. | |
1,0. | 1,221. | 2,309. | 1,900. | 0,524. | 1,946. | 0,717. | 0,253. |
2,0. | 1,534. | 3,004. | 1,339. | 0,294. | 1,279. | 0,313. | 0,357. |
3,0. | 1,813. | 3,840. | 1,188. | 0,190. | 1,131. | 0,181. | 0,412. |
4,0. | 2,062. | 4,735. | 1,123. | 0,134. | 1,078. | 0,120. | 0,441. |
5,0. | 2,286. | 5,661. | 1,088. | 0,101. | 1,053. | 0,087. | 0,457. |
На рис. 18, а показаны соответствующие графики переходных процессов. Видно, что с увеличением со0 они приближаются к графику экстремального переходного процесса.
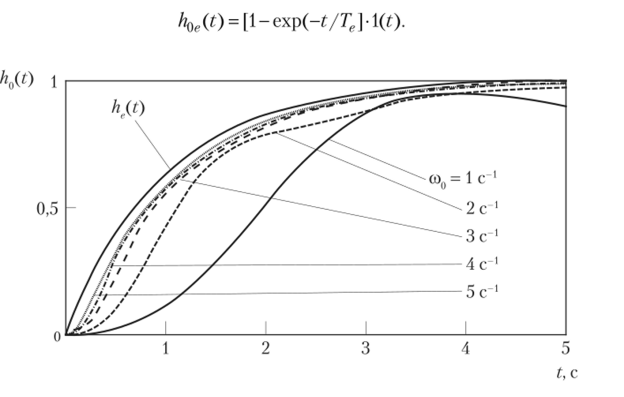
Рис. 18.