Последовательность построения динамически эквивалентной модели двигателя 64VI20° по сапам Р, и Рк
Радиус-вектор Р] (первого отсека) должен занять положение, соответствующее углу поворота кривошипа ф = 0°. Поскольку cos 120° < 0, то при ф = 0° радиус-вектор Р] должен совпадать с отрицательным направлением оси координат У. При вращении КВ по часовой стрелке система радиус-векторов Р{ будет. Плоскость расположения уравновешивающих масс на концах дополнительного вала показана на рис. 3.32… Читать ещё >
Последовательность построения динамически эквивалентной модели двигателя 64VI20° по сапам Р, и Рк (реферат, курсовая, диплом, контрольная)
- 1. Кривошип 1 (первого отсека) совмещается с положительным направлением оси координат У (угол поворота кривошипа Ф = 0°). При этом кривошипы 2 и 3 занимают положение в соответствии с их заклинкой относительно кривошипа /. В каждом отсеке вдоль кривошипа направляется радиус-вектор Q. В результате этого образуется пространственная система реально действующих сил Q = (т$ + /пл)Лсо2, вращающаяся вместе с КВ с угловой скоростью со.
- 2. Радиус-вектор Р] (первого отсека) должен занять положение, соответствующее углу поворота кривошипа ф = 0°. Поскольку cos 120° < 0, то при ф = 0° радиус-вектор Р] должен совпадать с отрицательным направлением оси координат У. При вращении КВ по часовой стрелке система радиус-векторов Р{ будет
вращаться с такой же угловой скоростью, но в противоположном направлении.
- 3. Так как кривошип 2 (второго отсека) вместе с радиусвектором Q2 повернулся относительно кривошипа 1 на угол 120°, то радиус-вектор Р2 повернется от своего вертикального положения в зоне отрицательных значений оси координат У также на угол 120°, но против часовой стрелки.
- 4. Так как кривошип 3 (третьего отсека) вместе с радиусвектором Q} повернулся относительно кривошипа 1 на угол 240°, то радиус-вектор Рг повернется от своего вертикального положения в зоне отрицательных значений оси координат У также на угол 240° тоже против часовой стрелки.
В результате названных построений силы инерции Р{ и Р R заменяются динамически эквивалентной моделью, состоящей из двух систем радиус-векторов Q и Р.
На основании этой динамически эквивалентной модели далее оценивается степень самоуравновешенности двигателя 64V1200 по имеющимся шести признакам.
В соответствии с п. 3.5.3 можно записать: 
Из рассмотрения радиус-векторов Q и Р видно, что Y.Q = 0> 1Р = 0. Из этого следует, что Т.Рр = 0 (1) и Х-Р, = 0 (3).
Схемы расположения радиус-векторов Q и Р являются равномерными, но продольно-несимметричными, поэтому ?М0Ф 0 и1А/р*0.
Условный центр тяжести КВ со схемами расположения кривошипов, показанными на рис. 3.31, находится на оси вращения КВ в плоскости расположения радиус-векторов Q2 и Р2. Это означает, что силы Q2 и Р2 ввиду отсутствия плеча продольного момента не создают, поэтому значение и направление продольного момента YMq определяется геометрическим сложением только радиус-векторов Mg, и Mg3 (рис. 3.33).
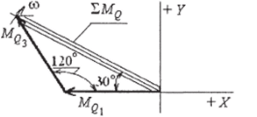
Рис. 3.33. Геометрическое сложение радиус-векторов продольного момента.
Mq1 и Mq).
Очевидно, что Mg, = Mg3 = Ql0. Направление этих радиусвекторов определяется по правилу «бурава» (см. п. 3.6.1).
Полученный результирующий радиус-вектор продольного момента YMq = V3??/, о — результат сложения радиус-векторов Mg, и Mg3 — показан на рис. 3.32. Уравновешивание продольного момента? Mg осуществляется установкой противовесов на щеках первого и третьего кривошипов КВ. Вместо противовесов на щеках третьего кривошипа может быть выполнен дисбаланс в маховике.
Значение и направление продольного момента? Мр, так же как и продольного момента? Mg, определяется геометрическим сложением радиус-векторов Мд, и Мд3 (рис. 3.34).
Очевидно, что Мд, = Мд3 = PlQ. Направление этих радиусвекторов также определяется по правилу «бурава» (см. п. 3.6.1).
Полученный результирующий радиус-вектор продольного момента У, Мр = л/з.Р/0 =^-msR (a2lQ — результат геометрического сложения радиус-векторов Мр, и Мрз — показан на рис. 3.32.
Поскольку радиус-вектор вращается в направлении, обратном направлению вращения КВ (против часовой стрелки), то его уравновешивание противовесами на щеках КВ невозможно, поэтому для уравновешивания YMp применяется уравновешивающий механизм, состоящий из дополнительного вала с расположенными на его концах противовесами. Этот вал устанавливается в плоскости симметрии двигателя под коленчатым валом и приводится во вращение от КВ зубчатой передачей с передаточным отношением, равным единице. Со стороны зубчатой передачи роль противовеса может выполнять дисбаланс в шестерне, установленной на конце дополнительного вала, который с противовесами вращается в направлении против часовой стрелки.
Плоскость расположения уравновешивающих масс на концах дополнительного вала показана на рис. 3.32. Следует отметить, что оставление неуравновешенным продольного момента YMp вызывает существенные вибрации двигателя и транспортного средства, на котором такой двигатель установлен.