Глобоидная червячная передача

Для построения упрощенной модели (см. рис. 23.10, б), состоящей из заготовок червяка и колеса, необходимо во фронтальной плоскости (окно вида спереди) по размерам, взятым из табл. 23.3, построить контур К1 вращения червяка (рис. 23.12). Образующая окружность глобоида имеет диаметр (d2 — 2/гй1). Червяк получим вращением (revolve) контура вокруг оси г). Контур колеса К2 располагаем в профильной… Читать ещё >
Глобоидная червячная передача (реферат, курсовая, диплом, контрольная)
В рассматриваемой передаче червяк имеет форму глобоида, т. е. внутренней поверхности кругового тора (рис. 23.10) [17—19]. Такая форма, как будет показано ниже, приводит к тому, что контакт червяка и колеса осуществляется, но всем зубьям, находящимся в зацеплении. В ранее рассмотренных передачах в контакте находятся по одному зубу червяка (шестерни) и колеса. В связи с этим глобоидная червячная передача может передавать более высокие мощ;
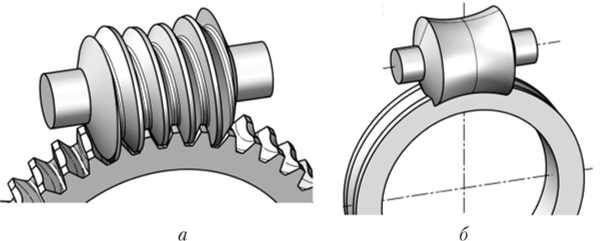
Рис. 23.10. Глобоидная червячная передача:
а — точная модель; 6 — упрощенная модель ности по сравнению с другими червячными передачами при тех же габаритных размерах.
Построим модель передачи с характерными параметрами. Расчет параметров выполнен согласно работе [18] и сведен в табл. 23.3 (рис. 23.11).
Для построения упрощенной модели (см. рис. 23.10, б), состоящей из заготовок червяка и колеса, необходимо во фронтальной плоскости (окно вида спереди) по размерам, взятым из табл. 23.3, построить контур К1 вращения червяка (рис. 23.12). Образующая окружность глобоида имеет диаметр (d2 — 2/гй1). Червяк получим вращением (revolve) контура вокруг оси г). Контур колеса К2 располагаем в профильной плоскости (окно вида слева). Колесо получаем вращением контура вокруг оси /2.
Таблица 23.3
Пример расчета глобоидной червячной передачи
Параметры и обозначения. | Расчетные формулы (индекс 1 — червяк, 2 — колесо). | Значения,. MM. |
Межосевос расстояние а | Исходные данные, задаются конструктором. | |
Передаточное число и | ||
Осевой угол профиля червяка а,. | ||
Число витков червяка Z | ||
Число зубьев колеса z2 | z2 = uz{ | |
Делительный диаметр червяка ф. | ф = (0.4—0.45)я. | |
Делительный диаметр колеса Ф> | d-2 = (2а — d) | |
Модуль т | т= d’l/Z'i | 3.875. |
Осевая толщина витка в середине червяка Sj. | = 0A5m | 5.478. |
Радиальные зазоры с | c = 0.2 m | 0.78. |
Высота головки витка ha{ | ha = 0.9w. | 3.49. |
Высота ножки витка ha | ha = m + c | 4.66. |
Радиусы кривизны переходных кривых р | p = 0.3m. | 1.2. |
Половина угла расчетного обхвата с | vc =180(4.55/z2). | 20.48. |
Ширина венца колеса Ь2 | b2 — 0.25″. | |
Наибольший диаметр колеса dm,2 | dm2 ~ (,(h + 2m) + 0.162 | 165.25. |
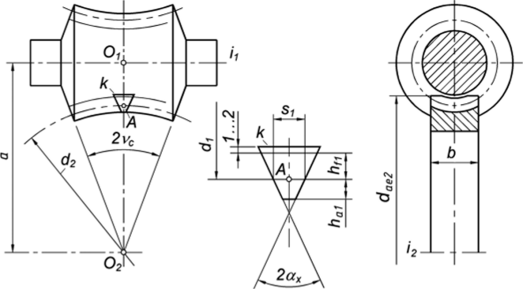
Рис. 23.11. Схема глобоидной червячной передачи
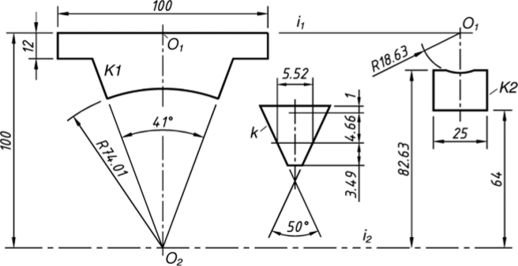
Рис. 23.12. Контуры глобоидной червячной передачи.
Прежде чем построить точную модель глобоидной передачи, исследуем форму рабочей поверхности витка глобоидного червяка. Контур витка — равнобочная трапеция (см. рис. 23.11, 23.12). Построим два отсека поверхности: расширенный отсек, который наглядно передает форму и закономерности поверхности витка, и ограниченный отсек с размерами витка червяка.
Рабочая поверхность образована перемещением отрезка боковой стороны трапеции (рис. 23.13). Согласно определению глобоидной передачи [14] этот отрезок совершает вращение вокруг оси червяка ц со скоростью (Oj и одновременно вращается вокруг оси колеса г2 со скоростью («>. Отношение скоростей вращения равно передаточному числу, т. е. ол^/со? = и.
Для построения поверхности необходимо в плоскости передачи (плоскости видового окна спереди) построить ось червяка i и оси колеса. Построить трапецеидальный контур k витка по его размерам (см. рис. 23.12 и табл. 23.3). Контур расположить в осевом сечении витка (см. рис. 23.11, 23.13, а).
Для расширенного отсека построим отрезок Ь, удлинив боковую сторону трапеции с одной стороны до оси г(, с другой — до перпендикуляра, опущенного на отрезок b из центра колеса 02. Далее зададим шаг вращения отрезка b вокруг оси червяка ц (скорость со() и определим шаг вращения вокруг оси колеса г2 (скорость со2). Например, ос"! = 40°, тогда со2 = Г.
Для построения поверхности необходимо получить ее каркас из образующих. Для этого нужно установить ПСК осью Z вдоль оси колеса i%. Командой rotate с опцией Сору построить ряд отрезков вращением отрезка b вокруг оси Z с шагом Г. Затем установить ПСК осью Z вдоль оси червяка i и повернуть построенные отрезки, начиная со второго, вокруг оси Z с шагом 40°. Поверхность (см. рис. 23.13, б) получим командой loft, указав образующие в порядке их следования.
Для получения ограниченного отсека поверхности (см. рис. 23.13, в —д) указанный алгоритм нужно применить к отрезку боковой стороны трапеции k.
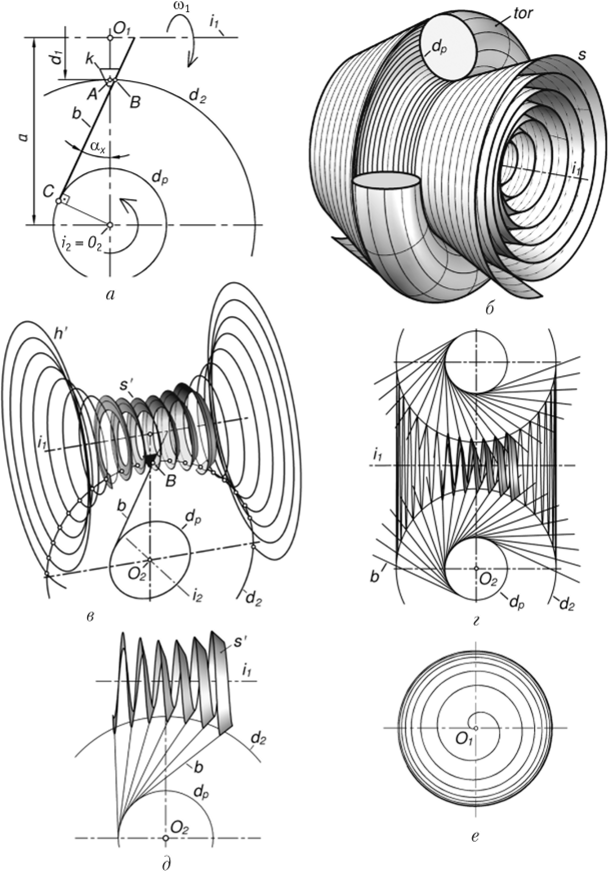
Рис. 23.13. Рабочая поверхность глобоидного червяка:
а — кинематическая схема; б — расширенный отсек поверхности; в — спираль делительного глобоида; г — осевое сечение поверхности; д — ограниченный отсек поверхности; е — поперечное сечение Установив маркер в точку В и перемещая его по указанному алгоритму с последующим построением сплайна, получим траекторию перемещения образующей b как спираль, намотанную на поверхность делительного глобоида червяка.
Ручное построение поверхности и траектории весьма трудоемко. Рекомендуем применить lisp-программу 23.2, позволяющую автоматизировать создание поверхности и траектории. О работе с программой см. и. 8.8.
Программой предусмотрено, что плоскость передачи — плоскость видового окна спереди. Ось червяка — ось X в ПСК этого окна. Ось колеса — направлена на наблюдателя.
Программа строит поверхность для заданного количества оборотов п образующего отрезка. Плотность каркаса поверхности задается параметром п1. Указав по запросу программы отрезок Ь, при значении п = 10, указанном в тексте программы, получим расширенный отсек s (см. рис. 23.13, б) как сетевой объект. Для преобразования сети в solid-объект необходимо к сетевому объекту применить команду thicken (Толщина), задать толщину, равной 0.01 — 0.001. После этого можно исследовать поверхность, строя командой section различные сечения.
Указав отрезок боковой стороны трапеции k и задав п = 3, получим узкий отсек рабочей поверхности витках' (см. рис. 23.13, д). Указав маркер, предварительно поставленный в точку В, закомментировав строку программы (draw 1st) и сняв комментарий со следующей строки, получим спираль (см. рис. 23.13, в).
Программа 23.2
;;;Глобоидная передача.
;;;Построение рабочей поверхности, витка или траектории перемещения.
- (defun с: glob (/ a angl ang2 dl d2 i j 1st n nl name namel nn w zl z2) (command «undo» «_m») ;_создать метку (setvar «cmdecho» 0) ;_откгаочить эхо-вывод (setvar «osmode» 0) ;_отключить объектную привязку (command «_mspace») перейти в пространство модели
- (command «_vscurrent» «_2») ;_установить каркасный стиль визуализации (command «_layer» «_m» «alx» «»)
- (command «_ucs» «_w»)
- (setq
name (car (entsel «Укажи перемещаемый объект «)).
nl 15 ;_кол-во вращений червяка на один оборот п 10 ;_количество оборотов червяка в одну сторону пп (1+ (fix (* nl n))) ;_кол-во образующих в одну сторону.
zl 1 кол-во зубьев червяка.
z2 40 ;_ кол-во зубьев колеса.
dl 45. ;_делительный диаметр червяка.
d2 155. ;_делительный диаметр колеса, а (*0.5 (+ dl d2)) ;_межцентровое расстояние.
w (/ z2 zll.) ;_передаточное число.
angl (/ 360. nl) ;_угол поворота червяка на один шаг, градусы.
ang2 (/ angl w 1.) ;_угол поворота колеса на один шаг червяка, градусы.
i 0.
).
- (repeat (* 2 nn)
- (setq j (- nn i))
- (command «_ucs» «_w»)
- (command «_ucs» «_x» 90)
- (command «_ucs» «_o» (list 0 (-a))) ПСК колеса
- (command «_rotate» name «» '(0 0) «_c» (* j ang2)) ,-_поворот объекта по колесу (setq namel (entlast));_объект после поворота по колесу (command «_ucs» «_w»)
- (command «_ucs» «3» '(00) '(0 -1) '(001)) ПСК червяка
(command «_rotate» namel «» '(00) (* j angl)) ;_поворот объекта по червяку (setq 1st (cons namel 1st));_внести имя объекта в список имен всех объектов (setq i (1+ i)).
).
(draw 1st);_построение поверхности ;;; (drawl 1st);_построение траектории (foreach р 1st (entdel р)).
).
;;;Формирование поверхности или витка лофтированием (defun draw (1st /).
- (command «_loft»)
- (foreach p 1st (command p)
).
(command «» «»).
).
;;;Формирование траектории перемещения (defun drawl (1st / pi).
- (command «ucs» «»)
- (coimnand «_spline»)
- (foreach p 1st
- (setq pi (cdr (assoc 10 (entget p))));_координаты точки в MCK (command pi)
).
(command .…')
)
- (defun c: mu () (command «_undo» «_b»));_ откат на начальную метку
- (princ «пДля выполнения введи с: glob») ;_сообщение при загрузке программы
Исследование поверхности s (см. рис. 23.13, а —г), выполненное построением продольных сечений, показывает, что все образующие касательны к поверхности кругового тора tor. Осью этого тора является ось червяка ц. Образующая тор окружность dp, называемая профильной окружностью, имеет центр в точке О2, ее радиус определяется как длина перпендикуляра, опущенного из точки 02 на любую из образующих. В итоге, рассматриваемую поверхность можно определить как линейчатую, образующие которой пересекают ось г, и касательны к поверхности тора с той же осью и образующей dp.
Поперечное сечение исследуемой поверхности (см. рис. 23.13, е) — это спираль, шаг которой стремится к нулю по мере разворачивания.
В предыдущих моделях для построения витка применяли команду sweep. Для рассматриваемой поверхности глобоидной передачи применение команды sweep связано с техническими сложностями. Поэтому применена команда LOFT. Точность поверхности, создаваемой командой LOFT, зависит от плотности каркаса образующих. Оценка точности поверхности по величине отклонения образующей от прямой линии показала, что уже при 6—8 образующих на один оборот червяка отклонение не превышает 10 3 мм. В программе 23.2 плотность задана значением п1 = 15, что приводит к отклонению на уровне 10 4 мм, т. е. к высокой точности модели.
Для создания витка необходимо построить трапецеидальный контур k (см. рис. 23.12). В программе 23.2 задать п = 3. Это приведет к построению витка, содержащего по три оборота в каждую сторону от точки А. Функция draw формирует виток как solid-объект (рис. 23.14).
Построенный виток нужно подрезать по краям и объединить с заготовкой червяка. Для этого необходимы две заготовки червяка: по глобоиду выступов (см. рис. 23.10,6) и глобоиду впадин. У глобоида впадин диаметр образующей окружности глобоида равен (d2 + 2hp). Подрезка краев витка выполнятся командой intersect применительно к витку и глобоиду выступов. Подготовленный виток нужно объединить (UNION) с глобоидом впадин.
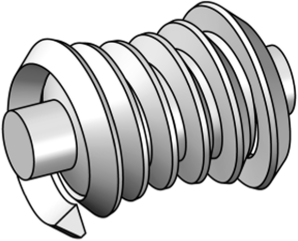
Рис. 23.14. Виток глобоидного червяка
Далее необходимо создать копию построенного червяка, совмещенную с оригиналом, и поместить ее на другой слой. У первого экземпляра командой fillet радиусом (см. табл. 23.3) выполнить сопряжение рабочих поверхности витка с внутренним глобоидом — получен исходный червяк.
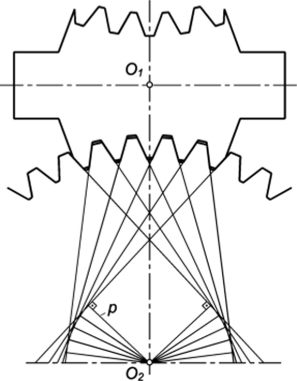
Рис. 23.15. Оценка точности модели глобоидной передачи по сечению главной плоскостью
Из второго экземпляра создадим производящий червяк. Для этого командой solidedit с опциями Face / Offset поверхность выступов витка нужно сместить наружу на величину радиального зазора с (см. табл. 23.3), затем наружные кромки выступов командой fillet скруглить радиусом 0.7—1.2 мм.
Для нарезания зубьев колеса применим методику, рассмотренную выше при построении архимедовой передачи. Необходимо создать сектор венца единичной впадины, применить к сектору программу 23.1 и получить объем впадины. Этот объем размножить массивом по количеству зубьев колеса. Затем вычесть все объемы впадин из заготовки колеса. Окончательная модель (см. рис. 23.10, а) получается при замене производящего червяка на исходный.
Для оценки точности построенной модели выполним сечение передачи ее главной плоскостью (рис. 23.15). По конечным точкам контуров сечений витка червяка построим отрезки (line). Для каждого из них определим расстояние до точки 02 как длину соответствующего отрезкар. Измерения (LIST) показали, что длины отрезков совпадают с точностью 10 т. е. все отрезки касательны к профильной окружности dp. Это свидетельствует о высокой точности полученной модели.
Сечение (см. рис. 23.15) наглядно показывает, что в глобоидной передаче все зубья червяка находятся в зацеплении с зубьями колеса. Контакт является линейчатым. Это приводит к распределению нагрузки по всем зубьям и является причиной высокой мощности глобоидной передачи. Для сравнения (см. рис. 23.8, 22.7, 21.6) в осевых сечениях других передач виден точечный контакт, причем всего лишь в одной паре зубьев.