Оценка точности модели
А — зоны пересечения — контакта (на поверхности колеса); 6 — оценка по длине хорды продольные полосы пересечения зубьев. Полосы проходят по всей длине зуба. Полосы 1 и 2 симметричны соответственно полосам 1 2' (рис. 22.7, а). Это solids-объекты. Толщина полос, определенная построением их поперечного сечения (section), составила 0.001—0.006 мм, что при «заложенной» в модель точности 0.001—0.0001… Читать ещё >
Оценка точности модели (реферат, курсовая, диплом, контрольная)
Построенная модель создана при условии касания зубьев шестерни и колеса в зоне их контакта. Допущения и погрешности модели приводят к наличию зазора между зубьями либо к их пересечению.
Проверить модель на отсутствие пересечения зубьев можно командой interfere (см. п. 21.4). В нашей модели в зоне контакта выявлены четыре.
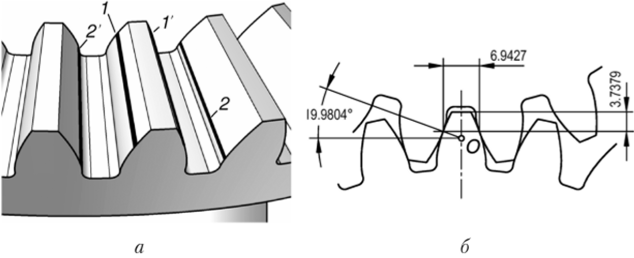
Рис. 22.7. Оценка точности реалистичной модели конической передачи:
а — зоны пересечения — контакта (на поверхности колеса); 6 — оценка по длине хорды продольные полосы пересечения зубьев. Полосы проходят по всей длине зуба. Полосы 1 и 2 симметричны соответственно полосам 1 2' (рис. 22.7, а). Это solids-объекты. Толщина полос, определенная построением их поперечного сечения (section), составила 0.001—0.006 мм, что при «заложенной» в модель точности 0.001—0.0001 говорит о незначительной погрешности модели.
Вторая оценка модели — по длине хорды зуба и углу зацепления (см. п. 21.4). Необходимо построить вид на внешние контуры зубьев (см. рис. 22.1, б) — это вид в направлении отрезка (1*—0) (см. рис. 22.3). Для этого установить ПСК осью Z вдоль указанного отрезка и выполнить команду plan. Применив команду SOLPROF, построить проекцию колес на плоскость экрана. Увеличить зону контакта и измерить хорду (см. рис. 21.6, д). В нашем примере (рис. 22.7,6) при модуле внешнего контура те = 5 высота измерения хорды h = 0.7476m^ = = 3.7379. Расчетная длина хорды s = 1.3870те = 6.9351. Измеренная длина хорды зуба колеса составила 6.9427, что соответствует погрешности 0.11% и говорит о высокой точности модели.
Построив проекцию точки О или точки 1* (см. рис. 22.7, б) на плоскость измерения хорды, можно определить угол зацепления передачи. При расчетной величине, а = 20° его значение в нашем примере составило 19.9804°, т. е. погрешность также на уровне 0.1%.