Энергетические режимы работы двигателя постоянного тока независимого возбуждения
А — привод диска; б — схема включения ДПТ; в — энергетическая диаграмма В этом режиме ДПТ потребляет из сети электрическую энергию, характеризуемую мощностью Р1=1Л> 0. Часть электрической энергии превращается в ДПТ в механическую энергию мощностью Рмех = Мсо > 0, отдаваемую исполнительному органу (НО), а часть электрической энергии в виде потерь превращается в теплоту в активных сопротивлениях… Читать ещё >
Энергетические режимы работы двигателя постоянного тока независимого возбуждения (реферат, курсовая, диплом, контрольная)
Двигатель постоянного тока НВ может работать в следующих энергетических режимах: идеального холостого хода; короткого замыкания; двигательный; динамического торможения; генераторный режим рекуперативного торможения; противовключения. В бытовой радиоэлектронной аппаратуре и технике возможна работа ДПТ в первых четырех режимах.
Режим идеального холостого хода, соответствует точке а электромеханической и механической характеристик, (рис. 12.34). В этом режиме ДПТ имеет следующие параметры:
Энергия в цепи «якорь ДПТ — сеть» не циркулирует, потерь в якорной цепи теоретически нет. Потери электрической мощности в цепи возбуждения для этого режима равны мощности, потребляемой обмоткой возбуждения: АРв = PB=UB-IB и будут одинаковыми во всех рассматриваемых ниже режимах работы. Эти потери мощности или энергии АЗ = АР • tp (где tp — время работы) идут на создание магнитного потока ДПТ.
Режим короткого замыкания соответствует точке б электромеханической и механической характеристик ДПТ (рис. 12.34).
Режим достигается увеличением момента сопротивления на валу ДПТ до величины Мщ. В этом режиме частота вращения вала ДПТ равна нулю: со = 0. Ток в цепи якоря равен току короткого замыкания 1Ю и на валу ДПТ создается момент короткого замыкания Мкз.
Двигатель постоянного тока получает от источника электрическую энергию, мощностью Р1 =1Л, и эта энергия преобразуется в тепловую в активных сопротивлениях цепи якоря. Полезная механическая мощность на валу двигателя равна: Рмех =Мсо = 0, т. е. двигатель не совершает полезной работы.
Режим короткого замыкания является аварийным для ДПТ и двигатель не должен работать в этом режиме долго, из-за большой вероятности теплового нарушения изоляции.
Двигательный режим реализуется на участке I (между точками, а и б) электромеханической и механической характеристик ДПТ (см. рис. 12.34).
В этом режиме параметры ДПТ лежат в пределах:
Электродвижущая сила двигателя Е и напряжения сети U направлены навстречу друг другу, а ток якоря протекает от положительного полюса к отрицательному.
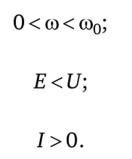
На рис. 12.36, а представлен электропривод компакт-диска, включающий электродвигатель ЭД, подключенный к сети, и диск. На схеме рис. 12.36, б представлена схема включения ДПТ с НВ.
Рис. 12.36. Двигательный режим ДПТ НВ:
а — привод диска; б — схема включения ДПТ; в — энергетическая диаграмма В этом режиме ДПТ потребляет из сети электрическую энергию, характеризуемую мощностью Р1=1Л> 0. Часть электрической энергии превращается в ДПТ в механическую энергию мощностью Рмех = Мсо > 0, отдаваемую исполнительному органу (НО), а часть электрической энергии в виде потерь превращается в теплоту в активных сопротивлениях цепи якоря ДПТ. На рис. 12.36, в представлена энергетическая диаграмма двигателя в этом режиме.
Потери электрической мощности в ДПТ НВ определяются уравнением.

" со0 ~ ю
где о = ——относительный перепад частоты вращения якоря дви;
со0
гателя.
Иными словами, потери мощности пропорциональны относительному перепаду частоты вращения якоря двигателя. При отсутствии в цепи якоря дополнительных сопротивлений (работа на естественной характеристике) для двигателей мощностью более 100 Вт потери мощности малы. Для двигателей мощностью до 10 Вт, применяемых в бытовой радиоаппаратуре, относительный перепад частоты вращения составляет 0,7—0,95 (мощность 0,04—0,65 Вт) и потери мощности в сопротивлении якоря (оно большое) велики — 70—95%.
Режим динамического торможения, или генераторный режим работы независимо от сети, соответствует участку III электромеханической и механической характеристик ДПТ (см. рис. 12.34). В этом режиме источник питания не участвует в энергетическом процессе, так как отключен от цепи якоря ДПТ (см. рис. 12.35, а). Электромеханическая и механическая характеристики соответствуют уравнениям (12.82).
Вся механическая энергия привода в виде кинетической энергии вращающихся масс якоря ДПТ и ИО (механическая мощность Рмех = со (-М) < 0) превращается ДПТ в электрическую энергию, мощностью Рг = U{-I) < 0 и расходуется в виде тепла в резисторах цепи якоря ДПТ (см. рис. 12.35, б). Режим динамического торможения широко применяется в бытовой радиоаппаратуре.
Вращение вала «ИО — якорь» ДПТ возможно по инерции, когда якорь двигателя отключается от сети. В этом случае торможение осуществляется за счет момента сопротивления, как правило, сил трения.
В случае изменения полярности питания цепи якоря двигатель имеет электромеханическую и механическую характеристики соответствующие прямым 2 и 3 на рис. 12.34.