Построить математическую модель АД для статического режима работы

Рассчитаем переходную характеристику замкнутой САУ с помощью ПП «МОДОС». Для этого построим в программе модель системы, состоящую из источника сигнала, сумматора, интегратора, упругого и апериодического звеньев с коэффициентами многочленов: для источника —, для сумматора —,, для интегратора —,, для упругого звена —,, для апериодического звена —,. Перед тем, как определить оптимальные… Читать ещё >
Построить математическую модель АД для статического режима работы (реферат, курсовая, диплом, контрольная)
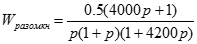
Перед тем, как определить оптимальные параметры настройки П, ПИ, ПИД регуляторов необходимо определить частоту среза объекта, которая находится из выражения для амплитудно-фазовой характеристики объекта управления. АФХ объекта получается после замены оператора р на jщ в заданной передаточной функции объекта.
Уравнения равновесия напряжений с потокосцеплениями в качестве переменных состояния:

Выражение электромагнитного момента через потокосцепления:

Где:
— электромагнитный момент.
— число пар полюсов.
— потокосцепления соответствующих обмоток.
— потокосцепление магнитов ротора с обмоткой статора.
— величины питающего напряжения соответствующих обмоток.
— активное сопротивление обмоток.
— собственная индуктивность обмоток.
— угол поворота ротор Вычисление угловой скорости вращения ротора:

Вычисление угла поворота ротора:
Напряжения питания в вентильном режиме:
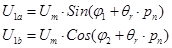
— амплитуда питающего напряжения.
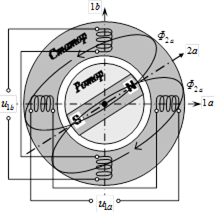
Конструкция двухфазной синхронной машины с постоянными магнитами на роторе.
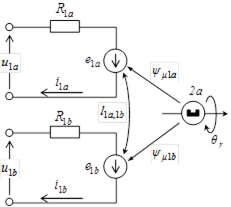
Электрическая схема замещения двухфазной синхронной машины с постоянными магнитами на роторе.
Представленные ниже экспериментальные переходные характеристики объекта h (t) табл.1 с достаточной точностью могут быть аппроксимированы экспоненциальной зависимостью:
где K0 — коэффициент передачи, Т0 — постоянная времени объекта на рис. 4.
Такая временная характеристика соответствует линейной математической модели в виде передаточной функции типового апериодического (инерционного) звена:
W0(p)=.
с достаточно большой инерционностью Т0 = 1000 — 5000 с, которую можно оценить моментом времени с координатой h (T0) = 0.63 hуст, где hуст — установившееся значение h (t) при t> ?.
Коэффициент передачи объекта определяется согласно выражению.
КО=?t°/?U,.
где ?U — приращение входного воздействия, ?t°- соответствующее приращение выходного сигнала. По экспериментальным данным определено К0=11К/В. Постоянная времени Т0=4200 с.
Статическая ошибка при пропорционально-интегральном законе регулирования равна 0.
Пусть коэффициент передачи системы равен, тогда .
Тогда.
.
Составим характеристический многочлен, который является суммой числителя и знаменателя передаточной функции разомкнутой системы, приравняем его к нулю:
Для систем 3-го порядка необходимым и достаточным условием устойчивости является положительность всех коэффициентов характеристического уравнения и то, что произведение средних двух коэффициентов многочлена больше произведения крайних. Таким образом, данная замкнутая система устойчива.
Построим асимптотические ЛЧХ (рис. 7).
Оценим критический коэффициент. Фазовая характеристика пересекает ось на частоте, поэтому .
Запас устойчивости по фазе порядка 60°. Запас устойчивости по амплитуде стремится к +?. Это хорошие показатели, поэтому оставим Кс=0.5. Частота среза, поэтому ожидаемое время регулирования.


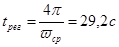
.
Однако, время регулирования может быть на самом деле в разы меньше, мы лишь оцениваем его порядок. Общепринятые уравнения исполнительного двигателя имеют вид.
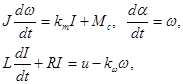
(6).
где — ток, — индуктивность якорной цепи.
Процессы в электрических цепях двигателя протекают существенно быстрее, чем в механических. Поэтому обычно пренебрегают влиянием цепи с передаточной функцией и рассматривают следующие уравнения динамики:
Потери в двигателе в номинальном режиме:
P1н = Р1н — P2н=81 522 — 75 000=6 522, Вт.
Потери на трение:
Pтр = k (п0/1000)2 (D1н/1000)3=3,44 (6Ґ103/103)2 (450/103)3=113, Вт, где:
k = 3+0,5· (D1н -100)/400=3,4375.
Добавочные потери в двигателе:
Pдоб = 0,005P1н=0,005 81 522=408, Вт.
Активное сопротивление обмотки статора при 75С:
R1 = kт R10=1,240,108=0,134, Ом.
где: kт = 1,24 — коэффициент, учитывающий изменение активного сопротивления обмотки статора при нагревании от 15С до 75С.
Потери в обмотках статора:
Pэ1н = 3· I21фн R1=320 020,134=3 855, Вт.
Полная механическая мощность:
Рмех = P2н + Pтр + Pдоб=75 000+133+407,61=75 520, Вт.
Потери в обмотках ротора:
Pэ2н = sн /(1- sн) Рмех=0,017/(1−0,017) 75 520=1 280, Вт.
Потери в стали магнитопровода АД:
Pст = P1нPэ1н — Pэ2н — Pтр — Pдоб=3822 -3855- 1280 -113 — 408 =866, Вт.
Фазный ток статора:
I1ф0 = I1фн · (I10/ I1н)= I1фн kio =200 0,53=52, А.
Линейный ток статора:
I10 = I1ф0 ()1-В=30, А.

Потери в обмотках статора:
Pэ10 = 3· I21ф0 R10=35 220,108=873, Вт.
Мощность, потребляемая двигателем из сети:
P10 = Pэ10 +Pтр +Pдоб +Pст=873+113+408+866 = 2 260, Вт.
Коэффициент мощности:
cos10 = P10 / (U1нI10)=2260/(38 030)=0,115.



Механическая характеристика при разных значениях амплитуды питающего напряжения В контуре управления анализируемые системы содержат микропроцессорные устройства, работающие с дискретными сигналами, т. е. такие системы являются не непрерывными, а дискретно — непрерывными. Микропроцессорные устройства квантуют непрерывный сигнал и по уровню и по времени. Квантование по уровню происходит потому, что амплитуда дискретного сигнала ограничена некоторой совокупностью значений, определяемой разрядностью микропроцессора. Но квантование по уровню по сравнению с квантованием по времени создает на выходе эффект второго порядка малости, поэтому обычно при рассмотрении динамики системы в первом приближении квантованием по уровню пренебрегают Анализируя влияние квантования сигнала по времени и сравнивая период дискретизации сигнала и величину постоянных времени объекта управления, можно определенно сказать, что исследуемую систему следует рассматривать как непрерывную, так как >.
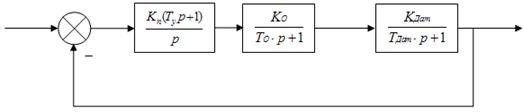
Структурная математическая модель непрерывной системы управления термическим оборудованием с пропорциональным законом регулирования показана на рисунке ниже.
Рассчитаем переходную характеристику замкнутой САУ с помощью ПП «МОДОС». Для этого построим в программе модель системы, состоящую из источника сигнала, сумматора, интегратора, упругого и апериодического звеньев с коэффициентами многочленов: для источника —, для сумматора —, ,, для интегратора —, ,, для упругого звена —, , для апериодического звена —, .