Использование эхолокационного оборудования при обследовании подводных переходов
Но ГБО дает лишь изображение поверхности дна и не может напрямую участвовать в формировании цифровой модели (ЦМ) объекта. Модель подводного рельефа в данном случае строится на основе данных однолучевого эхолота, прореженных путем специальных алгоритмов для корректного формирования поверхности и вычерчивания изолиний. Собранные данные нуждаются в прореживании, которое выполняется на ЭВМ… Читать ещё >
Использование эхолокационного оборудования при обследовании подводных переходов (реферат, курсовая, диплом, контрольная)
Использование эхолокационного оборудования при обследовании подводных переходов Шакиров Е. Р., Куликов А. М. Тюменский Индустриальный Университет, г. Тюмень В системе обеспечения надёжности и безопасности трубопроводного транспорта наибольшую сложность представляют пересечения газопроводами и нефтепроводами рек, каналов, озёр и водохранилищ подводные переходы или дюкеры.
Подавляющее большинство подводных переходов построено траншейным способом непосредственно в руслах рек и в водоёмах. Участки подводных переходов, являются постоянными зонами риска, так как аварии на подводных переходах могут нанести огромный экономический ущерб, а ликвидация аварий неизмеримо более трудоёмкий и долговременный процесс, чем на сухопутной линейной части.
Для безопасной работы подводных переходов трубопроводов необходимо применение современных технических средств на этапах изысканий для проектирования, строительства и последующей диагностики.
Руководящим документом при мониторинге подводных переходов на данный момент является РД 51−3-96 «Регламент по техническому обслуживанию подводных переходов магистральных газопроводов через водные преграды».
В спектр основных задач по диагностике технического состояния подводного перехода входят этапы по выполнению подводной съёмки акватории при помощи эхолокации, обнаружению оголённых и провисающих участков трубопроводов и определение их линейных размеров, определению состояния балластировки трубопровода на оголённых и провисающих участках.
Эхолокация наряду с гидролокационным обследованием дна является первым этапом приборного обследования акватории в коридоре подводного перехода. Задачей промера является измерение и картирование глубин водной преграды и градиентов дна на участке прокладки дюкеров и в пределах охранной зоны перехода. В ряде случае техническим заданием предусматривается выполнение эхолотного промера на участках русла различной протяженности ниже и выше технического коридора.
Классически эта работа выполняется однолучевым промерным эхолотом. Промерное судно, двигаясь по сетке запроектированных галсов, производит съемку рельефа дна. Шаг сетки галсов рассчитывается исходя из задач подробности съемки. Например, при «специальной» подробности промера, при сложном рельефе съемки, расстояние между галсами не должно превышать 5 м (СП 11−104−97), (рисунок 1).

подводный переход магистральный трубопровод Планирование галсов осуществляется с помощью специальных пакетов программ для гидрографических съемок, выполняющих планирование, производство работ, редактирование и интерпретацию результатов. Положение проектных галсов может задаваться различными способами, в том числе, генерироваться автоматически. При выполнении работ по диагностике подводных трубопроводов, на электронной карте с запланированными галсами должно быть нанесено положение обследуемого трубопровода, для выявления мест возможного размыва и оголения, или провиса.
Как средство дополнительного контроля при обнаружении оголенных участков трубопроводов и наличия посторонних предметов в зоне подводного перехода, используются гидролокаторы бокового обзора (ГБО), формирующие акустическую картину дна водоема и предметов, находящихся на нем.
Термин «боковой обзор» применяется потому, что этот тип гидролокаторов «смотрит» в обе стороны, влево и вправо от маршрута съемки, и формирует изображение при физическом движении антенны гидролокатора — буксируемого устройства — над дном.
Гидролокатор бокового обзора посылает ультразвуковой импульс под острым углом к плоскости дна и затем принимает вернувшийся назад отраженный от дна сигнал, разворачивая его построчно на экране монитора или принтере.
Так формируются отдельные строки сканирования дна, из которых, в порядке поступления с частотой до 20 Гц благодаря движению антенны, составляется изображение дна.
Но ГБО дает лишь изображение поверхности дна и не может напрямую участвовать в формировании цифровой модели (ЦМ) объекта. Модель подводного рельефа в данном случае строится на основе данных однолучевого эхолота, прореженных путем специальных алгоритмов для корректного формирования поверхности и вычерчивания изолиний. Собранные данные нуждаются в прореживании, которое выполняется на ЭВМ.
Там же создается приближенная модель, построенная на основе данных однолучевого эхолота, совмещенного с гидролокационными замерами ГБО.
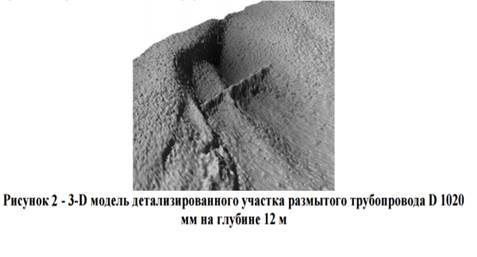
Контроль планово-высотного положения трубопровода на подводных (русловых) участках подводного перехода осуществляется с помощью использования трассопоисковой системы с генератором сигнала, подключаемым к трубопроводу. Модель трассы также совмещается с ЦМ участка (рисунок 2).
Точное координирование промерного судна осуществляется в реальном времени с помощью геодезических GPSприёмников.
Опорная базовая станция, установленная на берегу находится на пункте с известными координатами и по радиоканалу транслирует дифференциальную коррекцию для приёмника, находящегося на судне.
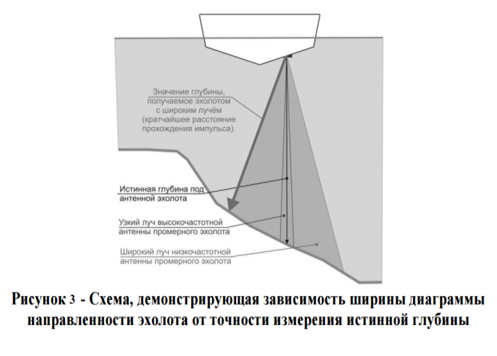
Также, на достоверность полученной информации о подводном рельефе влияет ширина диаграммы направленности однолучевого эхолота — она может составлять от нескольких единиц до нескольких десятков градусов.
При работах с широким лучом даже на относительно плоском рельефе, не говоря про расчлененный, в данные промеров входит ошибка измерения истинной глубины, в силу того, что отсчет производится не от точки непосредственно под излучателем, а от ближайшей точки отражения сигнала (рисунок 3).
Стоит отметить, что у эхолотов существует еще один недостаток — при работах в условиях ветра, волнения и других факторов, влияющих на стабильность судна, и непосредственно трансдьюсера, узкий луч, отклоняясь от вертикали, измеряет отличную от вертикали дальность и дает неверное значение глубины. Чем больше глубина и расчлененность рельефа, тем больше величина этой погрешности. Проблема решается лишь с помощью дополнительно подключаемого к системе, датчика динамических перемещений судна, который в режиме реального времени получает данные о крене, дифференте и вертикальных перемещениях судна и позволяет учитывать эти характеристики при записи данных или последующей обработке.
- 1. РД 51−3-96 «Регламент по техническому обслуживанию подводных переходов магистральных газопроводов через водные преграды». Москва 1996 г.;
- 2. Фирсов, Ю.Г. «Стандарты современной гидрографии и российские нормативные документы на выполнение промерных работ». СПб, 2005 г.;
- 3. Инженерно-геодезические изыскания при строительстве: СП-11−104−97, Часть III, «Инженерно-гидрографические работы при инженерных изысканиях для строительства», 2004 г.;
- 4. Стандарты МГО на гидрографические съемки (S-44). Итоговый проект 5-го издания. 2007 г.;
- 5. Фирсов, Ю.Г. «Основы гидроакустики и использования гидрографических сонаров». 2009 г.;