Разработка конструкции и исследование параметров гидродвигателя возвратно-поступательного движения
Использования потенциальной энергии (перепада давлений) и дифференциального золотника, который обеспечивает начало работы гидродвигателя при любом начальном положении золотника, в момент подачи давления в центральный его канал, золотник принудительно смещался в крайнее положение, что обеспечивало автозапуск, командное давление (нагнетание или слив) к управляемому его торцу подводилось при… Читать ещё >
Разработка конструкции и исследование параметров гидродвигателя возвратно-поступательного движения (реферат, курсовая, диплом, контрольная)
Разработка конструкции и исследование параметров гидродвигателя возвратно-поступательного движения
Рассмотрен поиск принципиальной схемы и конструкции гидродвигателя с комбинированным управлением реверсирующего золотника, приведены примеры его применения на сельхозмашинах, на его базе разработан и внедрен в производство гидровибратор для активации бункера зернокобайна.
Выведены дифференциальные уравнения и даны их решения, разработана методика исследования гидравлических и кинетических параметров гидродвигателя с учетом разрывности производной в момент переключения золотника обеспечивающий реверс движения потока жидкости. Приведен пример расчета.
Ряд активных рабочих органов сельскохозяйственных, мелиоративных и др. машин при выполнении технологического процесса совершают возвратно-поступательное движение, например: сегментные ножи; решета грохота, турельные стряхиватели, виброционная доска и др. машин.
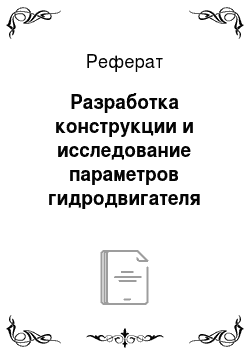
Наиболее распространенный вид их привода: кривошипно-шатунно-ползунковый механизм, рис. 1, обеспечивающий получение синусоидального закона движения рабочего органа, рис. 2, где показана циклограмма работы сегментного ножа с различными законами движения.
Как показано в [1] более рациональным является трапецеидальный закон движения, который обеспечивает постоянство скорости движения ножа на участке резания.
Рис. 1. Кривошипно-шатунный ползунковый механизм привода сегментного ножа: l — длина шатуна; r — радиус кривошипа; щ — угловая частота; y — перемещения
Была сделана попытка обеспечивать такой закон движения с помощью кулачкового механизма, однако, в виду больших динамических нагрузок, он быстро выходил из строя.
В связи с этим было обращено внимание на использование объемного гидропривода с применением поршневого цилиндра, поршень которого обеспечивает получение постоянной скорости движения при подаче постоянного расхода рабочей жидкости.
Данный вид привода был предложен в [2, 3], рис. 3.
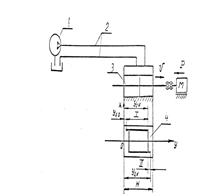
Рис. 3. Принципиальная схема гидропривода с гидродвигателем возвратно-поступательного движения:
1 — насос, трубрпроводы, гидродвигатель, циклограмма.
V — скорость; P — технологическая нагрузка; M — масса; H — размах колебаний; y — перемещение гидродвигатель реверсионный золотник кинетический Для реализации такого гидромеханизма в 1960 г. в ВИСХОМе была создана лаборатория гидропривода.
Были разработаны, изготовлены и испытаны ряд гидродвигателей с различными видами управления органа реверсирования движения поршня — золотником, обеспечивающий реверс движения потока жидкости:
механический (выявил полную несостоятельность в виду большой частоты колебаний);
гидравлические (с различными способами управления движением золотника).
Исследовались следующие схемы:
использования потенциальной энергии (перепада давлений) и дифференциального золотника, который обеспечивает начало работы гидродвигателя при любом начальном положении золотника, в момент подачи давления в центральный его канал, золотник принудительно смещался в крайнее положение, что обеспечивало автозапуск, командное давление (нагнетание или слив) к управляемому его торцу подводилось при совмещении канавкой на штоке соответствующих каналов (к другому торцу постоянно подведен слив), рис. 4; использование кинетической энергии (инерции движущихся масс) и симметричного золотника при перекрытии торцом поршня сливного канала, рис. 5.
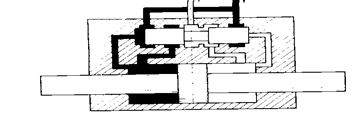
Рис. 5. Конструктивная схема гидродвигателя с использованием кинетической энергии управления симметричного золотника
Что требует дополнительного устройства для начала работы.
В ходе исследований было выявлены основные недостатки данных схем:
использование потенциальной энергии — достаточного перепада давлений на поршне (технологической нагрузки), в режиме «холостого» хода (без нагрузки) приводило к большим ударным нагрузкам в конце хода поршня, подъему давления, что обеспечивало переключение золотника, реверс потока жидкости и реверс движения поршня;
использование кинетической энергии — в режиме значительной технологической нагрузки инерция движущихся масс не обеспечивало переключение золотника и гидродвигатель останавливался («глох»).
Указанные недостатки обоих схем выявили их непригодность [4].
На основе анализа данных результатов были разработаны схемы с комбинированным гидравлическим управлением золотника В. В. Ведерниковым, В. М. Марквартде, Ю. В. Козловым и др. [5] была разработана «инерционно» поршневая и «пилотная» схема управления дифференциального золотника, см. рис. 6.
В момент перекрытия тором поршня сливного канала канавка на штоке соединяла канал командного давления (нагнетания или слива) с управляемым торцом золотника (к другому торцу постоянно подведен слив), нагнетание постоянно подведено в центральный канал золотника и воздействует на его плунжер (дифференциальный золотник); это перемещает золотник в другое крайнее положение и реверсирует направление движения потока жидкости, поршень тормозится и начнется обратное его движение.
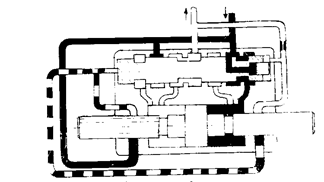
Рис. 6. Конструктивная схема гидродвигателя с комбинированным управлением дифференциального золотника
Автором был разработан ряд таких гидродвигателей возвратно-поступательного движения с различными размахом колебаний и различными площадями поршня, которые показали удовлетворительные результаты в составе гидроприводов различных машин и производились на ряде предприятий. Гидродвигатель с размахом 50 мм был использован для гидропривода сегментных ножей ЧВЛ-1 и производился в ВНР; с размахом 76,2 мм был использован для гидропривода сегментного ножа ОКМ-4,5 и производился в РФ.
На основе работ ВИСХОМа в ГСКБ г. Таганрога был разработан гидровибратор для активации доски вибробункера зернокомбайнов (для создания положительного периода давлений использовалась позиционная нагрузка на доске (пружина)) и с 1972 г. начал массово производится в РФ. В настоящее время производится гидроцилиндр ЕДЦГ 108.000 (вибратор зернобункеров зернокомбайнов) на заводе «Омскгидропривод».
Проведем аналитические исследования механики работы нелинейной системы гидродвигателя возвратно-поступательного движения с комбинированным гидравлическим управлением дифференциального золотника, который обеспечивает устойчивую работу приводимого органа как в режиме технологической нагрузки, так и в режиме «холостого» хода.
Сделаем следующие допущения:
- 1. Источник гидравлической энергии — насос постоянной производительности, на валу насоса поддерживаются постоянная частота вращения.
- 2. Производительность насоса линейно зависит от давления.
- 3. Температурный режим работы гидросистемы установившийся.
- 4. Нагрузка на поршень состоит из:
массы поршня со штоком и присоединенных элементов приводимого рабочего органа;
силы вязкого трения пропорционально скорости движения поршня (жидкостное трение в уплотнениях, гидравлические потери в гидродвигателе и трубопроводах);
силы сухого трения в уплотнениях поршня (штока) и подвижных элементах;
технологической нагрузке направленной против скорости движения поршня и постоянной на рассматриваемом участке.
- 5. Перетечки жидкости на поршне и золотнике линейно зависят от перепада давлений на поршне. Внешние утечки ввиду их малости не учитываются.
- 6. Волновые процессы в трубопроводах отсутствуют.
- 7. Коэффициент объемного сжатия постоянен.
- 8. Гидросистема симметрична относительно гидродвигателя (трубопровод нагнетания подобен сливному).
Принципиальная гидравлическая схема показана на рис. 3.
Цикл работы гидродвигателя разобьем на два:
- 1 рабочая жидкость и поршень с присоединенной нагрузкой в начале участка находится в состоянии покоя и, под влиянием поступающей жидкости из насоса, начинает двигаться; золотник находится в одном крайнем положении;
- 2 в определенный момент положения поршня золотник перемещается в другое крайнее положение и реверсирует движение потока жидкости (временем перемещения золотника можно пренебречь) — нагнетающая полость гидродвигателя становится сливной, давление жидкости на выходе из гидродвигателя падает, сливная полость становится нагнетающей, поршень тормозится и останавливается.
Указанные допущения позволяют вывести следующие дифференциальные уравнения:
Участок 1:
уравнение гидравлических параметров.

(1а) уравнение кинематических параметров.
(2а) где ксж = W/Eпр, W — объем жидкости в рассматриваемом трубопроводе и полости гидродвигателя (принимается среднее положение поршня); Епр — приведенный модуль упругости рабочей жидкости и трубопровода; кп — коэффициент перетечек на поршне и золотнике; - коэффициент утечек в насосе; р = р1 — р2 перепад давлений на поршне и золотнике; р1 — давление на входе в гидродвигатель; р2 — давление на выходе; - скорость изменения перепада давления на поршне; V — скорость движения поршня; = - ускорение движения поршня; y — перемещение поршня; F — площадь поршня; Qн — расход (подача) насоса; h — коэффициент вязкого трения на поршне и рабочей жидкости в трубопроводе приведенной к поршню; R — технологическая нагрузка и сухое трение на поршне и движущихся элементов.
Из (2).
дифференцируем.
и подставим в (1).

сгруппируем по степеням V.

(3).
из (1):

подставим в (2).

сгруппируем по степеням p.
Участок 2.
Так как рабочая жидкость в сливном трубопроводе практически не оказывает влияния на процессы, то присоединенной массой жидкости в сливном трубопроводе пренебрегаем также пренебрегаем частью гидравлических потерь в сливном трубопроводе Составим дифференциальные уравнения 2 участка (участок торможения):
уравнение гидравлических параметров.
(1b).
Знак минус у расхода насоса указывает на реверс потока рабочей жидкости;
уравнение кинематических параметров.
(2b).
Поскольку произошел отрыв потока жидкости, то напишем.
p = p2 (p1).
Произведем аналогичные вычисления:
Из (2а).
и.
Подставим в (1а).

группируем.

(3а) из (1а).

подставим в (2а).

группируем Полученные уравнения представим в виде.(разделив предварительно на Мксж/F и):

(5).
(6).
Данные дифференциальные уравнения являются линейными неоднородными с постоянными коэффициентами и постоянной правой частью.
Сделаем таблицу коэффициентов (см. табл.).
Рассмотрение результатов экспериментальных исследований показали, что процессы имеют колебательный характер, поэтому к n и в двухчленной форме решение будет:
скорость поршня.
(7).
где =.

Начальные условия 1-го участка:

Тогда С3 = -C1.

Vуст = qi/k2i.
Ускорение поршня.
(8).
Экстремум ускорения будет при.
Отсюда.
Время наступления экстремума.
. (9).
Для минимума формула аналогичная, только в числителе будет + N.
Перемещение поршня.

В первом приближении примем, что при t = 0, у = 0.
Отсюда известно, что 2 + n2 = k2, тогда.
(10).
Перепад давлений на поршне.
(11).
Начальные условия :
Скорость изменения перепада давлений.
(12).
при.
Тогда Экстремум перепада давлений наступит при достижении времени.
(13).
Время достижения минимума наступит при смещении на N.
Составим таблицу значений коэффициентов кинематических параметров Ci:
Участок. | C1. | C2. | C3. | C4. | |
 | |||||





и гидравлических параметров Di.:
Участок. | D1. | D2. | D3. | |
 | ||||




Для решения систем уравнений (5) и (6) начальных условий недостаточно, то есть неизвестны: ни начальный перепад давлений, ни его производная, ни начальное ускорение движения, ни начальное положение поршня.
Поэтому задаемся дополнительными начальными условиями, например:
при t1 = 0, y1 = 0,.

Отсюда.

Конец 1-го участка определится моментом переключения золотника, из экспериментов известно, что это происходит в момент перекрытия торцо поршня сливного канала и открытия канавкой на штоке канала управления торцом золотника, то есть задаемся y1k.
Из (10) методом последовательного приближения находим t1k.
Из уравнений:
- (7) находим конечную скорость в конце 1-го участка V1к;
- (8) ускорение ;
- (11) перепад давлений p1к;
- (12) производную перепада давлений .
В момент переключения золотника происходит переход из 1-го участка во второй, давление в полости слива становится равным нулю, то есть р1 0, а перепад давлений определяется давлением в полости нагнетания, то есть р р2.
Находим начальные условия 2-го участка:
V20 = V1k, p20 = p1k,.
отсюда находим производные:
из (1).
из (2).
В конце 2-го участка поршень останавливается, то есть V2k = 0.
Методом последовательных приближений находим время торможения t2k и определяем путь торможения y2k, перепад давления p2k и его ускорение .
Уточняем начальные условия.
y10 = H — y2k,.
где H — полный размах хода поршня); p10 = p2k.
Далее повторяем процесс вычислений до получения необходимой сходимости.
Было проведено исследование гидравлических и кинематических параметров гидродвигателя ВПД со следующими характеристиками: размах колебаний поршня H = 88 мм, площадь поршня F = 5,41 см, момент переключения золотника у1к = 79,5 мм.
Основные характеристики гидропривода с гидродвигателем ВПД были приняты следующие: Ксж1 = 0,84 смкг; Ксж2 = 0,64 смкгкоэффициент перетечек ГДВПД k = 2,19 смкг, коэффициент утечек насоса = 0,0016 смкг, присоединенная масса подвижных элементов М = 0,006 кгссм, коэффициент скоростных потерь h = 0,4 кгс. см, коэффициент гидравлических потерь h = 0,2 кгс. см, коэффициент инерционных потерь h = 0,062 кгс2. см, расход насоса Q = 1370 смс, нагрузка на поршень R = 225, 450, 675 кг.
Дополнительно вычислялся коэффициент полезного действия.
где = М — 0,001 (масса штока и поршня).
На рисунке 7 представлены значения гидравлических и кинематических параметров в зависимости от времени.
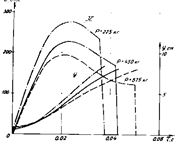
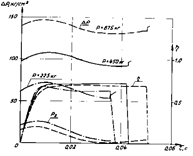
Рис. 7. Параметры, ГДВПД с ходом 76 мм при различных нагрузках в зависимости от времени
Библиографический список
- 1. Васильев Г. К., Долгов И. А. Математические методы в земледельческой механике. — М.: Машиностроение, 1967. 203 с.
- 2. Marks K. Hydraulische mahantriebe, «Land. Forsch.», № 2, 1958.
- 3. Marks K. Hydraulische schwingantriebe fun mahwerk, «Land. Forsch.», № 2. 1961.
- 4. Ведерников В. В. Гидромотор возвратно-поступате-льного движения. /Гидропривод и гидросистемы управления тракторов и сельскохозяйственных машин. — М.: ВИМ, 1971. C 155−158.
- 5. Ведерников В. В., Марквартде В. М., Козлов Ю. В., Шубенков Б. И., Елисеенко И. Н., Клейман Г. М. Поршневой возвратно-поступательного движения, Авт. свид, СССР, № 939 847, бюл. № 24, 1982.
- 6. Ведерников В. В. Расчет параметров гидродвигателя возвратно-поступательного движения. //Тракторы и сельхозмашины. 1975. № 8. С.22−24.
- 7. Ведерников В. В., Чепурной А. И. Расчет параметров гидродвигателя ВПД на ЭЦВМ. //Тракторы и сельхозмашины. 1980. № 3. С. 17−19.