Гидроакустические приборы.
Акустические средства измерений
Гидролокатор (от гидро… и лат. loco — помещаю), гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов. Кроме расстояния до погруженного в воду объекта, некоторые гидролокаторы определяют также его глубину погружения по наклонной дальности и углу направления на объект в вертикальной плоскости. Работа гидролокатора… Читать ещё >
Гидроакустические приборы. Акустические средства измерений (реферат, курсовая, диплом, контрольная)
В качестве излучателей и приёмников в звуковой области используются электродинамические и пьезоэлектрические излучатели и гидрофоны, а в ультразвуковой — пьезоэлектрические и магнитострикционные. Из наиболее существенных применений гидроакустики следует отметить эхолот, гидролокаторы, которыми пользуются для решения военных задач (поиски подводных лодок противника, бесперископная торпедная атака и т. д.); для мореходных целей (плавание вблизи скал, рифов и др.), рыбопромысловой разведки, поисковых работ и т. д.
Пассивным средством подводного наблюдения служит шумопеленгатор, позволяющий определить направление источника шума, например корабельного винта. Подводные мины снабжаются т. н. акустическими замыкателями (взрывателями), вызывающими взрыв заряда мины в момент прохождения над ней корабля. Самонаводящиеся торпеды могут самонаправляться на корабль по его шуму и т. д.
Гидрофон (от гидро… и греч. phone — звук), гидроакустический звукоприёмник, Гидрофоны являются электроакустическими преобразователями и применяются в гидроакустике для прослушивания подводных сигналов и шумов, для измерительных целей, а также как составные элементы направленных приёмных гидроакустических антенн. Наиболее распространены гидрофоны, основанные на электродинамическом, пьезоэлектрическом и магнитострикционном эффектах. Электродинамические гидрофоны по принципу действия не отличаются от воздушных электродинамических микрофонов, если не считать особенностей конструкции, связанных с изоляцией от воды.
В пьезоэлектрическом гидрофоне используется прямой пьезоэффект некоторых кристаллов (сегнетова соль, кварц, дигидрофосфат аммония, сульфат лития и т. д.), при котором переменная деформация кристалла вызывает появление переменных поверхностных электрических зарядов и соответственно переменной электродвижущей силы на электродах-обкладках. Широко пользуются пьезоэлектрическими керамическими материалами (типа керамики титаната бария, титаната-цирконата свинца и др.). Чувствительные элементы пьезоэлектрических гидрофонов изготавливают в виде пакетов прямоугольной или цилиндрической формы.
Магнитострикционные гидрофоны основаны на обратном магнитострикционном эффекте некоторых ферромагнитных металлов (в основном никеля и его сплавов), при котором деформация вызывает появление переменной магнитной индукции в магнитопроводе и как следствие — переменной эдс на обмотке. Чувствительные элементы гидрофона (сердечники) набираются, как правило, из тонких пластин для избежания потерь на токи Фуко.
Гидрофоны, предназначенные для измерительных целей, должны быть ненаправленными и обладать ровной частотной характеристикой во всей области исследуемых частот. Для этой цели удобно пользоваться малыми по сравнению с длиной волны полыми сферическими приёмниками из пьезокерамики, совершающими сферические симметричные колебания.
Одна из важнейших характеристик гидрофонов — чувствительность, представляющая собой отношение электрического напряжения к звуковому давлению в мкв/бар; она лежит в пределах от долей мкв/бар для малых (диаметром в несколько мм) керамических сферических приёмников до сотен мкв/бар для пакетов из пьезоэлектрических кристаллов. Для увеличения чувствительности (а также для устранения шунтирующего действия кабеля) используются гидрофоны с предварительными усилителями, которые монтируются в одном корпусе с приёмником и вместе опускаются в воду.
Эхолот (от эхо и лот), навигационный прибор для автоматического измерения глубины водоёмов с помощью гидроакустических эхо-сигналов. Обычно в днище судна устанавливается вибратор, к которому периодически подаются от генератора электрические импульсы, преобразуемые им в акустические, распространяющиеся в ограниченном телесном угле вертикально вниз.
Отражённый дном акустический импульс принимается тем же вибратором, который преобразует его в электрический. После усиления импульс поступает на индикатор глубины, отмечающий отрезок времени (в сек) от момента посылки импульса до момента возвращения эхо от дна и преобразующий его в визуальные показания или запись глубины. Длительность импульсов — от 0,05 до 20 мсек с частотой заполнения от 10 до 200 кгц. Малые длительности и высокие частоты используются при измерениях малых глубин, большие длительности и низкие частоты — при измерении больших глубин.
Вибратором может служить магнитострикционный преобразователь или пьезокерамический. В качестве индикаторов глубин применяются проблесковые указатели с вращающейся неоновой лампочкой, вспыхивающей в момент приёма эхо-сигнала; стрелочные, электроннолучевые и цифровые указатели, а также самописцы, записывающие измеряемые глубины на движущейся бумажной ленте электротермическим или электрохимическим методом.
Эхолоты изготовляются на разные интервалы глубин, в пределах от 0,1 до 12 000 м и работают при скоростях хода судна до 30 узлов (55 км/ч) и даже более. Погрешность Э. от 1% до сотых долей процента. Э. используются также для поиска косяков рыбы, подводных лодок, для исследования звукорассеивающих слоев, определения типа грунта, стратификации донных осадков и др. гидроакустических измерений.
Гидролокация (от гидро… и лат. locatio — размещение), определение положения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звуковых сигналов (активная локация). Под термином «гидролокация» понимают исключительно звуковую локацию, поскольку звуковые волны являются единственным известным в настоящее время видом волн, распространяющихся в морской среде без значительного ослабления.
Гидролокация имеет большое значение в навигации для обнаружения невидимых подводных препятствий, при рыбной ловле для обнаружения косяков и отдельных крупных рыб, в океанологии как инструмент исследования физических свойств океана, картографирования морского дна, поиска затонувших судов и т. п., а также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
При пассивной локации (шумопеленгации) с помощью шумопеленгатора определяют направление на источник звука (пеленг источника), пользуясь звуковым полем, создаваемым самим источником. При этом применяют различные методы: поворачивают приёмную акустическую антенну с острой направленностью до положения, в котором принятый сигнал имеет максимальную интенсивность (т. н. максимальный метод пеленгования); измеряют разность фаз между сигналами на выходе двух разнесённых в пространстве антенн (фазовый метод); определяют относительную разницу во времени приёма сигналов двумя разнесёнными антеннами посредством измерения взаимной корреляции (корреляционный метод), а также путём комбинации этих методов. Системы пассивной гидролокации применяются главным образом для гидроакустического оснащения подводных лодок и надводных кораблей.
Системы активной гидролокации основаны на явлении звукового эхо (рис. 2) и различаются методами временной модуляции посылаемого сигнала и способами обзора пространства. Для определения дальности объекта чаще всего пользуются импульсной, частотной и шумовой модуляциями сигнала.
Гидролокатор (от гидро… и лат. loco — помещаю), гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов. Кроме расстояния до погруженного в воду объекта, некоторые гидролокаторы определяют также его глубину погружения по наклонной дальности и углу направления на объект в вертикальной плоскости. Работа гидролокатора (рис. 2.20) происходит следующим образом. Импульс электрического напряжения, выработанный генератором, через переключатель «приём — передача» подаётся к электроакустическим преобразователям (вибраторам), излучающим в воду акустический импульс длительностью 10—100 мсек в определенном телесном угле или во всех направлениях.
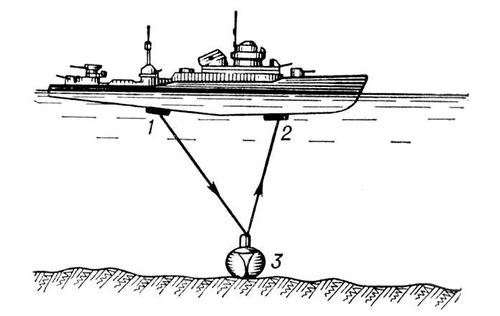
Рис. 2.20. Принцип работы гидролокатора: 1 — излучатель; 2 — приёмник; 3 — отражающее тело.
По окончании излучения вибраторы подключаются к гетеродинному усилителю для приёма и усиления отражённых от объектов импульсных акустических сигналов. Затем сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электроннолучевую трубку (дисплей). На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние (дистанция) до объекта; с помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются, по максимуму звучания определяется пеленг; на дисплее высвечивается сигнал от объекта и измеряется дистанция до него и направление (пеленг). Длительность паузы между соседними посылками импульсов составляет несколько сек.
Большинство гидролокаторов работает в звуковом и ультразвуковом диапазонах частот (4—40 кгц). Это обусловлено необходимостью получения острой направленности антенны (при относительно небольших её размерах) и достижения заданной разрешающей способности.
Основной характеристикой гидролокаторов является дальность обнаружения, которая зависит от мощности излучаемого сигнала, от уровня акустических помех и от условий распространения звука в водной среде.
Наряду с помехами на дальность обнаружения оказывает влияние рефракция, имеющая место в сложных гидрологических условиях. Гидролокаторы различного назначения обладают дальностью действия от сотен метров до десятков километров и обеспечивают точность пеленгования около 1°.
Шумопеленгатор — устройство для обнаружения источника звуковых колебаний или шума и определения направления (пеленга) на него; применяются главным образом в гидролокации. Работают в области звуковых, ультразвуковых и инфразвуковых частот.
Шумопеленгаторы подразделяются на стационарные, которые устанавливаются на дне океана (моря) на специальных опорных конструкциях или на неподвижных (на якоре) буях, и подвижные — на подводных лодках, на некоторых типах надводных кораблей, в контейнерах, опускаемых в воду с вертолёта, на свободно плавающих (дрейфующих) буях.
Шумопеленгатор состоит из приёмника звука, компенсатора, фильтра, усилителя и индикатора. Приёмником звука чаще всего является акустическая антенна, состоящая из нескольких (до сотен штук) гидрофонов, обладающая нужной диаграммой направленности. Компенсатор служит для поворота оси диаграммы направленности антенны на шумящий объект и определения её направления. При использовании вращающейся антенны компенсатор в составе шумопеленгатора обычно отсутствует.
Фильтр шумопеленгатора пропускает определённую полосу звуковых частот. Выделение низких частот способствует увеличению дальности действия шумопеленгатора, а высоких — улучшению отношения сигнал/помеха и повышению точности пеленгования. Усилитель увеличивает амплитуду принимаемых сигналов до нужного для индикации уровня. Индикатором может быть телефон, динамик, электроннолучевая трубка, дисплей.
Существуют устройства, сопрягаемые с шумопеленгатором, с помощью которых посредством анализа спектра принимаемого акустического сигнала производится классификация (определение типа) шумящих объектов (подводная лодка, надводный корабль, торпеда и т. п.). Точность пеленгования целей современного шумопеленгатора может достигать долей градуса, а дальность действия — десятков км.
Контрольные вопросы
- 1. Что такое гидрофон, принцип его устройства и работы.
- 2. Что такое эхолот, принцип его устройства и работы.
- 3. Объясните принцип работы гидролокатора.
- 4. Что такое шумопеленгатор, принцип его устройства и работы.
- 1. Перечислите виды преобразователей упругих колебаний и волн?
- 2. Какую энергию преобразовывают в акустическую и обратно электроакустические преобразователи?
- 3. В чем заключается прямой и обратный пьезоэлектрический эффект?
- 4. Какую энергию преобразовывают в акустическую и обратно электростатические и пьезоэлектрические преобразователи?
- 5. Какую энергию преобразовывают в акустическую и обратно электродинамические, электромагнитные и магнитострикционные преобразователи?
- 6. Принцип действия электростатических, пьезоэлектрических электродинамических, электромагнитных и магнитострикционных преобразователей.
- 7. Какой вид преобразователей имеет наибольший КПД?
- 8. Какой вид преобразователей имеет наибольшую удельную мощность?
- 9. Какие преобразователи преимущественно используются на мегагерцовом диапазоне частот?
- 1. Как называется приемники звука в воздушной среде?
- 2. Для чего применяются микрофоны?
- 3. Чем отличаются измерительные конденсаторные микрофоны от других микрофонов?
- 4. По способу преобразования звука на какие группы делятся микрофоны?
- 5. Перечислите и объясните основные параметры (характеристики) микрофонов.
- 6. Объясните работу электродинамического катушечного микрофона.
- 7. Объясните работу электродинамического ленточного микрофона.
- 8. Объясните работу конденсаторного микрофона.
- 9. Объясните работу электретного микрофона.
- 10. Объясните работу пьезоэлектрического микрофона.
- 11. Объясните работу электромагнитного микрофона.
- 12. Объясните работу угольного порошкового микрофона.
- 1. Для чего предназначен образцовый источник шума?
- 2. Какие требования предъявляются к образцовым источникам шума?
- 3. Какие метрологические характеристики должны быть указаны в паспорте образцового источника шума?
- 4. Каким должен быть уровень звукового давления в источниках шума?
- 1. Что такое громкоговоритель?
- 2. Что такое акустическая система?
- 3. Что такое головка громкоговорителя?
- 4. Дайте классификацию головок по принципу действия.
- 5. Перечислите технические характеристики головок громкоговорителей.
- 6. Объясните принцип действия динамического диффузионного громкоговорителя.
- 1. Что собой представляет шумомер?
- 2. Принцип действия шумомера.
- 3. Как устроен шумомер?
- 4. Как и с помощью каких средств измерений осуществляют калибровку шумомеров?
- 5. Перечислите состав аппаратуры для измерения шума.
- 6. Чем отличаются анализатор гармоник и спектрометр друг от друга?
- 7. Из каких блоков состоит анализатор спектра?
- 1. Что из себя представляет реверберационная камера?
- 2. Для чего предназначены реверберационная камера?
- 3. Что такое объём и эквивалентная площадь звукопоглощения реверберационной камеры?
- 4. Какие методы оценки степени диффузности поля знаете?
- 5. Как осуществляется измерение времени реверберации?
- 6. Как проверяется звуковое поле реверберационной камеры?
- 1. Какие знаете средства измерений в области физиологической акустики?
- 2. Что из себя представляет аудиометр?
- 3. Для чего предназначен аудиометр?
- 4. Для чего предназначен и из себя представляет прибор «Искусственное ухо»?
- 5. Для чего предназначен и из себя представляет прибор «Искусственный мастоид»?
- 6. Объясните схему поверки аудиометров.