Система автоматического управления гидросуппортом токарного станка
РА · FА = РБ · FБ При прохождении щупа 9 по копиру 8 изменяется осевое открытие щели золотника 10, а следовательно и давление в полости Б. Цилиндр 6 перемещается и перемещает корпус золотника 10. Это перемещение происходит до тех пор, пока вновь не установится равновесное состояние. Таким образом, цилиндр 6 с резцом 4 полностью отрабатывает перемещение, заданное копиром 8 и на заготовке 1… Читать ещё >
Система автоматического управления гидросуппортом токарного станка (реферат, курсовая, диплом, контрольная)
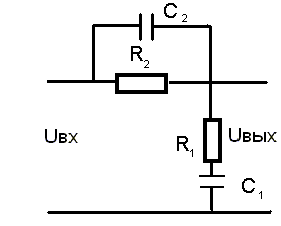
Гидравлические копировальные устройства, применяемые на токарных станках, предназначены для автоматизации процесса обработки сложных фасонных поверхностей деталей машин, имеющих, как правило, круглое поперечное сечение.
Обрабатываемая деталь 1 установлена в патроне 2 и в заднем центре 3 токарного станка. Резец 4 закреплен в резцедержателе каретки 5, связанной со штоком цилиндра 6 и расположенной на направляющих суппорта 7. С копиром 8 взаимодействует щуп 9 однокромочного золотника 10. Полости, А и Б цилиндра 6 соединены между собой постоянным дросселем 11.
При обработке детали 1 сообщается вращение для создания скорости резания, а суппорту 7 — движение продольной подачи. Рабочая жидкость под давлением проводится в полость, А цилиндра и через постоянный дроссель 11 попадает в полость Б, откуда через щель золотника 10 на слив. На схеме видно, что величина давления в полости Б определяется открытием щели золотника 10 и величиной проводимости постоянного дросселя 11. В нейтральном положении (при неподвижном гидросуппорте) давление в полостях, А и Б таково, что поддерживается равновесие цилиндра 6.
РА · FА = РБ · FБ При прохождении щупа 9 по копиру 8 изменяется осевое открытие щели золотника 10, а следовательно и давление в полости Б. Цилиндр 6 перемещается и перемещает корпус золотника 10. Это перемещение происходит до тех пор, пока вновь не установится равновесное состояние. Таким образом, цилиндр 6 с резцом 4 полностью отрабатывает перемещение, заданное копиром 8 и на заготовке 1 формируется заданная поверхность.
В САУ гидросуппорта в качестве объекта управления входит процесс резания в замкнутой технологической системе станка.
ТГУ, с. | КГУ, мм2/с. | КГЦ ,. 1/мм2. | ТР, с. | СРУ. | XРУ. | УРУ. | V, м/мин. | t, мм. | n. | KV. | w0 ,. 1/с. | б. | С Н/мм. | |
0,05. | 2· 106. | 2· 10−4. | 0,002. | 3· 103. | 0,9. | 0,5. | 0,2. | 1,0. | 0,9. | 5· 103. | ||||
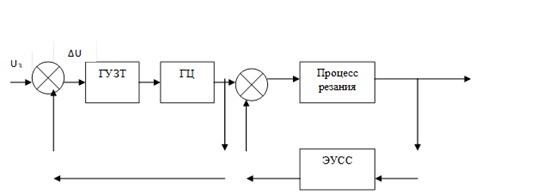
Функциональная схема САУ. Описание функций входящих элементов.
Процесс резания Передаточная функция процесса резания:
W= KР / (TР + 1) ,.
где KР — коэффициент резания;
ТР — постоянная времени стружкообразования, с.
Коэффициент резания KР зависит от силы резания и параметров резания.
KР = KРS · KPt · KPост ,.
где KРS = PS / S — составляющая коэффициента резания по подаче;
KPt = Pt / t — составляющая коэффициента резания по глубине;
KPост — составляющая коэффициента резания от прочих параметров резания.
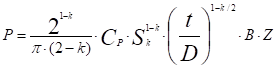
Сила резания при точении :

При равномерном фрезеровании цилиндрической фрезой :
При полном фрезеровании торцовой фрезой :
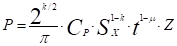
;
При шлифовании :
;
Эквивалентная упругая система станка.
(в предположении одномассовой системы).
.
где w0 — собственная частота колебаний, с-1 ;
d — коэффициент затухания колебаний ;
у — деформация упругой системы станка, мм ;
С — жесткость упругой системы станка, Н/мм ;
PВХ — входной силовой параметр, Н .
Механический редуктор
или ,.
где wВЫХ, aВЫХ — соответственно угловая скорость и угол поворота выходного звена редуктора ;
wВХ, aВХ — соответственно угловая скорость и угол поворота входного звена редуктора ;
КР — коэффициент передачи.
Электронный усилитель.

.
где ТЭУ — постоянная времени электронного усилителя, с ;
UВЫХ — выходное напряжение, В ;
UВХ — входное напряжение, В ;
КЭУ — коэффициент усиления .
Тиристорный усилитель-преобразователь.

.
где ТТП — постоянная выхода тиристорного преобразователя, с ;
UВЫХ — выходное напряжение, В ;
UВХ — входное напряжение, В ;
KТП — коэффициент передачи (усиления) .
Электродвигатель постоянного тока.
.
где ТЯ — электромагнитная постоянная времени якоря, с ;
ТМ — электромеханическая постоянная двигателя, с ;
w — угловая скорость, с-1 ;
KД — коэффициент передачи электродвигателя, 1/сВ ;
UД — напряжение якоря, В.
Гидроусилитель золотникового типа.
.
где ТГУ — постоянная времени гидроусилителя, с ;
Q — выходной параметр — расход рабочей жидкости, м3 ;
КГУ — коэффициент передачи, мм2/с ;
h — входное перемещение плунжера золотника, мм .
Гидродвигатель.
.
где ТГД — постоянная времени гидродвигателя, с ;
w — выходная угловая скорость гидродвигателя, с-1 ;
KГД — коэффициент передачи гидродвигателя, 1/мм2 ;
Q — входной расход рабочей жидкости, м3 .
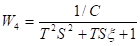
Гидроцилиндр (без учета массы).
.
где Y — выходное перемещение штока гидроцилиндра, мм ;
KГЦ — коэффициент передачи, 1/мм2 ;
Q — расход рабочей жидкости, м3 .
Асинхронный двигатель.
.
где ТД — постоянная времени электродвигателя, с ;
J — выходной ток в цепи питания, А ;
КМ — коэффициент пропорциональности между моментом нагрузки и током в цепи питания, А/Нм ;
М — входной момент нагрузки на валу, Н· м .
Преобразователь линейного перемещения.
.
где UВЫХ — выходное напряжение преобразователя, В ;
Кn — коэффициент передачи, В/мм ;
SВХ — входное перемещение, мм .
Преобразователь тока.
.
где UВЫХ — выходное напряжение преобразователя, В ;
Кn — коэффициент передачи, В/А ;
JВХ — входной ток, А .
Преобразователь силы.

.
где UВЫХ — выходное напряжение преобразователя, В ;
Кn — коэффициент передачи, В/Н ;
РВХ — входной силовой параметр, Н .
Преобразователь углового перемещения.
.
где UВЫХ — выходное напряжение преобразователя, В ;
Кn — коэффициент передачи, В/рад ;
бВХ — входной угол поворота, рад .
Тахогенератор

.
где UВЫХ — выходное напряжение тахогенератора, В ;
КТГ — коэффициент передачи, В· с ;
dб/dt — угловая скорость входного вала, рад/с .
Составление типовых звеньев Передаточные функции элементов.
Гидроусилитель золотникового типа.
Гидроцилиндр (без учета массы).
.
W=.
Процесс резания.
W= KР / (TР + 1) ,.
ЭУСС ,.
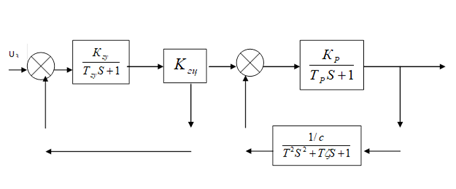
Структурная схема САУ.

Определение устойчивости системы По исходным данным строим ЛАХ и ЛФХ разомкнутой системы.
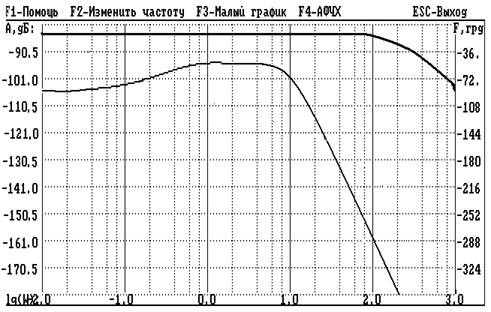
Рис. 1 Система неустойчива.
W/ = W1•W2•W3•W4 = =.
=.


Ф (S) = =.


Подбор корректирующего устройства Для устойчивости системы необходимо подобрать корректирующее устройство. Корректирующее устройство можно подобрать путём построения ЛАХ неизменяемой части и желаемой ЛАХ.
W (S) =.

Определение частот для построения неизменяемой ЛАХ:
щ1н = 1/Т3 = 1/0,02 = 50; lg12.5=1,653;
щ2н = 1/Т2 = 1/0,002 = 500; lg20 = 2,894;
щ3н = 1/Т1 =1/0,05 = 20; lg25 = 2,301.
20lgK = 20lg11,22= 21.
Построение ЛАХ неизменяемой части представлено на Рис. 1.
При получении дополнительных условий.
max<=25−30%;
tр<=0,2 с; определим частоты для построения желаемой ЛАХ:
щe<�щср< щк По диаграмме Солодовникова определяем частоту среза wср

=54,95; lgwср=1.67.
40<54,95<400.
щк =Dщ= 400 lgщк=2.6.
ще=e = =6,32 lgще= 0.95.
0.95 <1.67<2.6
Построим желаемую ЛАХ (Рис.2).
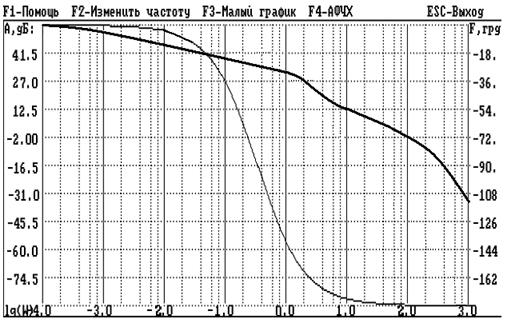
Рис. 2 Построение желаемой ЛАХ
Wк ==.

Построим ЛАХ корректирующего устройства.
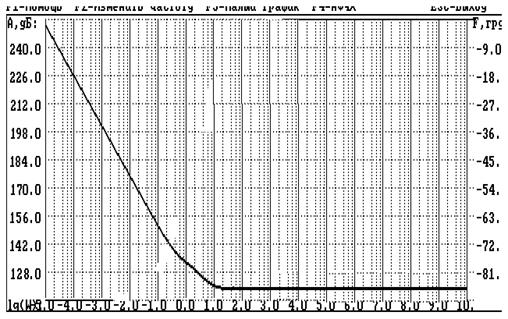
Рис. 3 ЛАХ корректирующего устройства
По ЛАХ корректирующего устройства выбираем схему корректирующего устройства.


;
Произведем расчет элементов корректирующего устройства.
1) Т=T=0,2.
T=0,6.
T=Т=1.
Т=Т=0,002.
Пусть С=10мкФ, тогда.

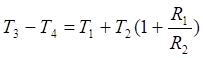


W (P)=.

T=RC.
Пусть С=10Мкф, тогда.
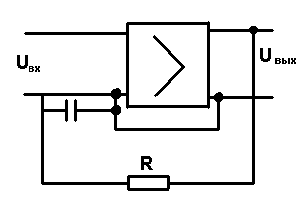
R=T/C=2,602/10=0.2602кОм Построим переходный процесс синтезированной системы.
Рис. 4 Переходный процесс синтезированной системы
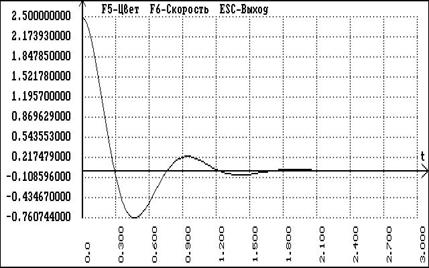
Рис. 5 Ошибка синтезированной системы
По графику (Рис.4) определим основные показатели качества.
1. Максимальное перерегулирование.
у =(хmax-хвын)*100%/хвын=(3.26−2.28)*100%/50=1.96%.
2. Время регулирования.
tр=1,8с.
- 3. Число колебаний tk=1.
- 4. Собственная частота колебаний.
w=2П/tk=2*3.14/2=3.14.
5. Логарифмический декремент затухания.
d=ln (qi/qi+1)=ln (0.327/0.103)=1.155.
6. Максимальная скорость отработки сигнала.
[dx/dt]max=1,22.
Построим ЛАХ и ЛФХ разомкнутой части синтезированной системы.
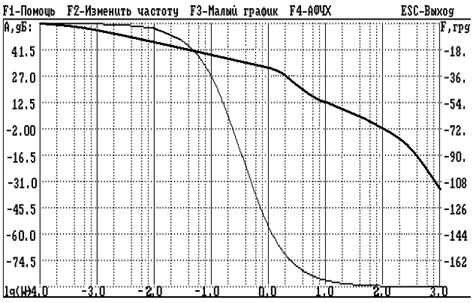
Рис. 6 ЛАХ и ЛФХ синтезированной системы
Заключение
По заданной конструктивной схеме составили функциональную схему и динамическую модель исследуемого объекта в виде системы дифференциальных уравнений. Составили структурную схему и реализовали ее на ЭВМ. Определили показатели качества системы. Провели синтез САР с учетом дополнительных условий. Проанализировав полученную систему удостоверились, что она удовлетворяет заданным требованиям.
Используемая литература
- 1. Теория автоматического управления: Учеб. для вузов по спец. «Автоматика и телемеханика». В 2-х ч. Ч.I. Теория линейных систем автоматического управления/ Н. А. Бабаков, А. А. Воронов, А. А. Воронова и др.; Под ред. А. А. Воронова.—2-е изд., перераб. и доп.—М.: Высш.шк., 1986.—367с., ил.
- 2. В. В. Семенов, А. В. Пантелеев, А. С. Бортовский. Математическая теория управления в примерах и задачах. — М.: МАИ, 1997.