Взаимное ориентирование аэроснимков с новым сочетанием угловых элементов в стереопаре
При таком выборе фотограмметрической системы координат, в которой будет осуществляться взаимное ориентирование аэроснимков, шесть элементов внешнего ориентирования пары снимков примут нулевые значения. Так как начало системы совпадает с S1, то ХS1 = УS1 = ZS1 = 0. Базисный компоненттакже примет нулевое значение, поскольку базис проектирования оказался в плоскости ХУ. Равны нулю и угловые элементы… Читать ещё >
Взаимное ориентирование аэроснимков с новым сочетанием угловых элементов в стереопаре (реферат, курсовая, диплом, контрольная)
Взаимное ориентирование снимков — фундаментальная задача фотограмметрии. От точности ее решения зависит достоверность окончательного результата, характеризующего пространственное положение сфотографированного объекта (местности). Фотограмметрическая обработка снимков, предусматривающая их взаимное ориентирование, позволяет существенно сократить объем полевых геодезических работ, необходимых для внешнего (геодезического) ориентирования модели объекта, построенной по этой технологии.
На практике широкое распространение получили две системы взаимного ориентирования стереопары [1]. Их названия базировались на аналоговых принципах обработки снимков. В первой системе взаимное ориентирование осуществлялось на аналоговых приборах при неподвижном базисе проектирования (отсюда и название «базисная»). Вторая система (линейно-угловая) предполагала выполнять взаимное ориентирование пары снимков при неподвижном левом снимке. Такое название она получила из-за того, что на аналоговых приборах отечественного производства взаимное ориентирование велось не только угловыми движениями правой камеры фотограмметрического прибора, но и линейными (движения bz и by). В настоящее время первую систему по-прежнему называют базисной, а вторую — системой левого снимка [2].
Анализируя подходы к выбору фотограмметрических систем координат, в которых ведется взаимное ориентирование стереопар в названных выше системах, можно заметить, что возможны и иные варианты взаимного расположения координатной системы и плоскости снимка. Важно лишь то, чтобы из восьми угловых элементов стереопары три в выбранной системе координат оказались равными нулю. Например, в базисной группе элементов ф и х оказались равными нулю, так как за ось абсцисс фотограмметрической системы координат принят базис проектирования, а щ1 = 0, поскольку плоскость ХZ этой системы совмещена с главной базисной плоскостью левого снимка, в которой лежит главный луч левой связки, что и привело к отсутствию угла щ1 в данной ситуации. Однако невозможно «придумать» такую систему, чтобы в ней для стереопары осталось меньше пяти угловых элементов, ибо взаимное положение двух плоскостей в пространстве с точностью до параллельного переноса определяют пять параметров, которые в фотограмметрии называют элементами взаимного ориентирования пары перекрывающихся снимков. Не удастся, разумеется, избавиться одновременно и от любых двух одноименных элементов левого и правого снимков стереопары. Тем не менее, можно предложить целый ряд новых сочетаний элементов взаимного ориентирования (ЭВзО) снимков посредством варьирования направлениями координатных осей фотограмметрической системы координат, в которой решается данная задача. К этому побуждают и следующие обстоятельства.
Погрешности ЭВзО, вызванные известными причинами, приводят к деформациям в плане и по высоте созданной с их использованием пространственной фототриангуляционной сети (построенной, например, способом независимых или частично зависимых моделей [1]). И хотя эти погрешности вполне подчиняются нормальному закону их распределения (обладают свойством компенсации), тем не менее, кроме уже известных факторов ситуация усугубляется наличием корреляционных зависимостей между ошибками ЭВзО смежных моделей. На это обратил внимание еще в середине прошлого века доктор технических наук И. Т. Антипов [3]. Согласно его исследованиям эти зависимости (корреляционные связи) могут приводить к накоплению ошибок в угловых элементах внешнего ориентирования аэроснимков, что вызовет дополнительный прогиб маршрутной модели в координатных плоскостях ХZ и ХУ.
Поскольку используемые на практике базисная и линейно-угловая группы ЭВзО получены без учета корреляционных связей [3], можно предположить, что могут существовать сочетания элементов и с меньшими коэффициентами корреляции между их ошибками. Современные тенденции развития фотограмметрических принципов измерений, о которых шла речь в работе [4], также могут повлиять на взаимозависимости ошибок ЭВзО в цифровой фотограмметрии. Например, способ идентификации соответственных точек на цифровых снимках существенно отличается от бинокулярного принципа создания искусственного стереоэффекта на аналоговых фотограмметрических приборах. Может быть и сам «пиксельный» подход внесет определенные коррективы в решение задачи взаимного ориентирования аэроснимков (см. например, [5, 6]). Появились публикации (например, [7]), которые возвращают нас к использованию во взаимном ориентировании аэроснимков алгебры кватернионов. Этот метод предложен профессором М. С. Урмаевым [8] в восьмидесятых годах прошлого столетия. Однако, судя по публикациям, преимущества его пока еще не доказаны.
Рассмотрим один их возможных вариантов нового сочетания угловых элементов в стереопаре. Он не исследован на корреляционные связи, а призван обратить внимание ученых и специалистов на возможно новое направление в исследовании технологии взаимного ориентирования аэроснимков.
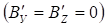
Обращаясь к теоретическим основам взаимного ориентирования аэроснимков с новой группой угловых элементов, вместо традиционной угловой ориентации снимков [9] б, щ, ч воспользуемся новой трактовкой их последовательности, то есть щ, б, ч. Тогда связь направляющих косинусов с угловыми элементами внешнего ориентирования аэроснимка будет представлена так:
(1).
Пусть взаимное ориентирование аэроснимков ведется в фотограмметрической системе координат (Х, У, Z), начало которой совмещено с центром проекции (S1) левого снимка. При этом плоскость ХУ проходит через базис проектирования параллельно оси ординат (у2) правого снимка, а координатная плоскость ZУ параллельна оси ординат (у1) левого снимка.
При таком выборе фотограмметрической системы координат, в которой будет осуществляться взаимное ориентирование аэроснимков, шесть элементов внешнего ориентирования пары снимков примут нулевые значения. Так как начало системы совпадает с S1, то ХS1 = УS1 = ZS1 = 0. Базисный компоненттакже примет нулевое значение, поскольку базис проектирования оказался в плоскости ХУ. Равны нулю и угловые элементы ч1, щ2: первый вследствие взаимной параллельности осей У и у1, второй — из-за параллельности оси у2 плоскости ZУ. Оставшиеся не нулевые угловые элементы и составят группу ЭВзО:
ф, щ1, б1, б2 и ч2.
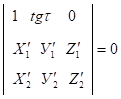
фотограмметрический стереопара аэроснимок система Известное условие пересечения соответственных лучей стереопары [1] для назначенной выше системы координат примет следующий вид:
.
Или.
.

где — пространственные координаты соответственных точек на левом и правом аэроснимках.
Поскольку, следовательно,.
.
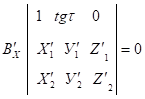
или, раскладывая данный определитель по элементам первой строки,.

(2).

Выражение (2) представляет собой уравнение взаимного ориентирования снимков в назначенной выше фотограмметрической системе координат. Заметим, что в данном случае пространственная координатная система левого снимка совпадает с фотограмметрической, а правого снимка стереопары (с началом в S2) ей параллельна. Однако фотограмметрические координаты (Х, У, Z) относятся к точке модели (точке пересечения соответственных лучей после взаимного ориентирования снимков), а пространственные характеризуют положение этой же точки на левом и правом аэроснимках.
Поскольку при взаимном ориентировании непосредственно измеряемыми величинами являются плоские координаты соответственных точек на снимках (х1, у1; х2, у2), то для перехода к пространственным воспользуемся формулами связи [9], имеющими следующий вид:
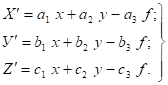
(3).
Уравнения пространственных преобразований (3) совместно с направляющими косинусами (1) позволяют включить в уравнение взаимного ориентирования стереопары (2) определяемые неизвестные ф, щ1, б1, б2 и ч2. Учитывая, что угловые элементы ч1 и щ2 равны нулю, направляющие косинусы (1) примут новые значения. Тогда уравнения (3) в окончательном виде будут выглядеть так:
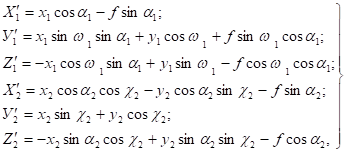
(4).
где f — фокусное расстояние аэроснимка.
После подстановки пространственных координат (4) конкретной точки с плоскими ее координатами х1, у1; х2, у2 в уравнение взаимного ориентирования (2) получим тригонометрическое (нелинейное) его выражение с пятью определяемыми неизвестными ЭВзО. Следовательно, для их определения необходимо измерить плоские координаты хотя бы пяти точек. Такую систему уравнений обычно решают методом Ньютона через приближенные значения неизвестных. При избыточном числе точек (n > 5) используют метод наименьших квадратов (МНК). Рассмотрим параметрический способ его реализации.
Пусть известны приближенные значения определяемых ЭВзО (ф), (щ1), (б1), (б2) и (ч2), и измерены плоские координаты соответственных точек стереопары (n > 5). Тогда уравнения поправок, соответствующих функции (2), примут следующий вид:
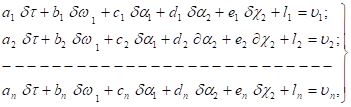
(5).
где аi, bi, …, ei — коэффициенты, которыми являются частные производные от функции (2) по переменным ф, щ1, б1, б2, ч2, а свободные члены (li) подсчитываются посредством подстановки в нее приближенных значений ЭВзО, используя выражение (4) и плоские координаты соответственных точек стереопары.
Вычислим несколько коэффициентов, например, а и b.
Коэффициент а вычисляется просто:

Для определения коэффициента b сначала вычислим частные производные от пространственных координат левого снимка, в которые входит угловой элемент щ1:
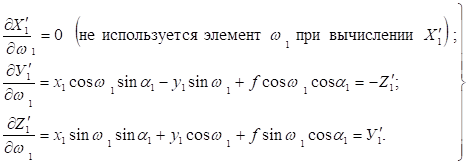
Остальные пространственные координаты соответственных точек для переменной щ1 будут считаться константами. Подставляя теперь в общий дифференциал функции (2) значения полученных частных производных, для коэффициента b получим следующее значение:

Аналогично вычисляются и остальные коэффициенты уравнений поправок (5):



Полученную систему уравнений поправок (5) при n > 5 решают под условием то есть используя МНК. Тогда от n уравнений поправок переходят к пяти нормальным уравнениям, из решения которых получают поправки к приближенным ЭВзО. Поскольку они, как правило, далеки от их истинных значений, решение задачи ведется методом последовательных приближений. При этом в каждом приближении коэффициенты уравнений поправок (5) уточняются новыми значениями ЭВзО, вычисляемые по следующим формулам:
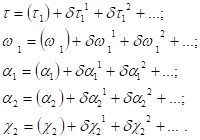
Обычно достаточно 4−6 приближений до полной сходимости итерационного процесса.
Известно, что в результате взаимного ориентирования стереопары создается модель сфотографированного объекта. В компьютерных технологиях вычисляются фотограмметрические координаты (Х, У, Z) на основе прямой фотограмметрической засечки [1]:

Множитель N вычисляют по разным формулам в зависимости от вида съемки (фототопографическая, воздушная, космическая). Предлагается общая формула для всех упомянутых видов съемки:

Для воздушной съемки данная формула повышает точность определения N за счет использования большего числа измеренных величин при его вычислении.
При полной фотограмметрической обработке отдельной стереопары (одиночной модели) для перехода от фотограмметрической системы координат к геодезической применяются известные [10] уравнения пространственных преобразований, для чего используются опорные геодезические точки.
- 1. Лобанов, А. Н. Фотограмметрия [Текст]: Учебник для вузов / А. Н. Лобанов. М.: Недра, 1984. 552 с.
- 2. Обиралов, А. И. Фотограмметрия [Текст]: Учебник для вузов / А. И. Обиралов, А. Н. Лимонов, Л. А. Гаврилова. М.: КолосС, 2004. 240 с.
- 3. Антипов И. Т. О корреляционных связях ошибок элементов взаимного ориентирования в рядах аналитической пространственной фототриангуляции [Текст] // Труды НИИГАиК, 1968. т. ХХI. С. 39−46.
- 4. Тюфлин Ю. С. Фотограмметрия — вчера, сегодня и завтра [Текст] // Изв. Вузов. «Геодезия и аэрофотосъемка», 2011. № 2. С. 3−8.
- 5. Lu Dengsheng, Moran Emilio, Hetrick Scott. Detection of impervious surface change with multitemporal Landsat images in an urbanrural frontier // ISRRS J. Photogramm. and Retome Sens, 2011. 66, № 3. P. 298−306. Англ.
- 6. Balci Murat, Foroosh Hassan. Subpixel estimation of shifts directly in the Fourier domain //IEEE Trans. Image Process, 2006. 15, № 7. P. 1965;1972.
- 7. Безменов В. М. Элементы кватернионов в фотограмметрии [Текст] // Изв. Вузов. «Геодезия и аэрофотосъемка». 2009. № 4. С. 48−56.
- 8. Урмаев М. С. Применение алгебры кватернионов в фотограмметрии [Текст] // Изв. Вузов. «Геодезия и аэрофотосъемка». 1986. № 2. С. 81−90.
- 9. Добрынин Н. Ф., Пимшина Т. М. Использование космических средств позиционирования при обработке аэрои космической информации [Электронный ресурс] // «Инженерный вестник Дона», 2013, № 3. Режим доступа: http://www.ivdon.ru/magazine/archive/n3y2013/1835 (доступ свободный). Загл. с экрана. Яз. рус.
- 10. Куштин, В. И. Преобразование координат, используемых в геодезии [Электронный ресурс] // «Инженерный вестник Дона», 2012, № 4−2. Режим доступа: http://www.ivdon.ru/magazine/archive/n4p2y2012/1240 (доступ свободный). Загл. с экрана. Яз. рус.