Разработка поведенческой модели сенсора линейного ускорения с двумя осями чувствительности для моделирования в среде Simulink программного пакета MatLab
Результаты исследований, изложенные в данной статье, получены при финансовой поддержке Минобрнауки РФ в рамках реализации проекта «Создание высокотехнологичного производства для изготовления комплексных реконфигурируемых систем высокоточного позиционирования объектов на основе спутниковых систем навигации, локальных сетей лазерных и СВЧ маяков и МЭМС технологии» по постановлению правительства… Читать ещё >
Разработка поведенческой модели сенсора линейного ускорения с двумя осями чувствительности для моделирования в среде Simulink программного пакета MatLab (реферат, курсовая, диплом, контрольная)
Одним из динамично развивающихся научно-технических направлений является микросистемная техника. В рамках данного направления создается большое количество различных по функциональному признаку микроэлектромеханических систем (далее МЭМС). Микромеханические сенсоры линейных ускорений (акселерометры) представляют собой один из классов МЭМС, получивших широкое распространение и изготавливаемых по групповым методам изготовления компонентов микроэлектроники и микросистемной техники. Микромеханические акселерометры находят применение в системах контроля и безопасности транспортных средств, инерциальных навигационных системах, интерактивных игровых приставках, медицинском оборудовании и т. д. [1 — 7].
В данной статье рассматривается поведенческая модель емкостного сенсора линейного ускорения с двумя осями чувствительности с целью проверки работоспособности синтезируемой МЭМС.
Конструкция сенсора На рисунке 1 представлена конструкция микромеханического сенсора линейных ускорений с двумя осями чувствительности.
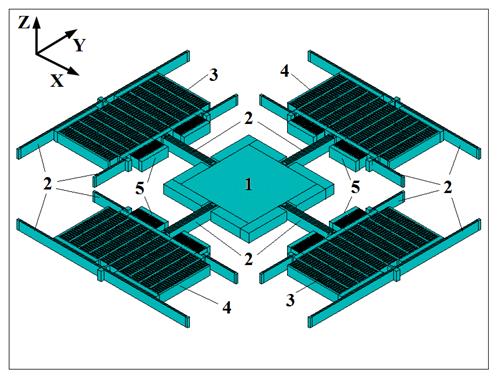
Рис. 1. — Микромеханический сенсор линейных ускорений с двумя осями чувствительности
Разработанный микромеханический сенсор содержит инерционную массу 1, подвес чувствительного элемента 2, емкостные преобразователи перемещений 3, 4, электростатические приводы 5.
Достоинство предложенной конструкции микромеханического сенсора заключается в возможности его работы как акселерометра прямого преобразования, так и компенсационного.
Математическая модель. Математическая модель движения чувствительного элемента акселерометра в форме уравнений в переменных состояния может быть получена на основе уравнения Лагранжа 2-го рода и выглядит следующим образом [1, 8]:
поведенческий моделирование сенсор линейный где x, y — перемещения чувствительного элемента по осям Х и Y; m — масса чувствительного элемента; в — коэффициент демпфирования; щ01, щ02 — собственные частоты колебаний чувствительного элемента по осям Х и Y; Fx, Fy — силы инерции; Fel1, Fel2 — электростатические силы; Щ — угловая скорость.
Силы, действующие на чувствительный элемент, выражаются равенствами [1]:

(2).
где ах, аy — линейные ускорения по осям Х и Y; N1 — число пальцев подвижного гребенчатого электрода электростатического привода; - относительная диэлектрическая проницаемость воздушного зазора; - электрическая постоянная; h — толщина структурного слоя; d1 — зазор между пальцами гребенок подвижного и неподвижного электродов электростатического привода; UDC — постоянное напряжение; UAC1, UAC2 — переменные напряжения.
Изменение емкостей преобразователей перемещений считается по формулам [1, 9 — 11]:
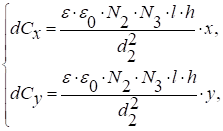
(3).
где N2, N3 — число пальцев и гребенок подвижных электродов емкостных преобразователей перемещений; l — длина перекрытия пальцев гребенок подвижных электродов емкостных преобразователей перемещений; d2 — зазор между пальцами гребенок подвижного и неподвижного электродов емкостных преобразователей перемещений.
Коэффициент жесткости подвеса чувствительного элемента определяется исключительно свойствами структурного слоя и конфигурацией упругих балок. Однако, как видно из конструкции предложенного устройства и принципа его функционирования емкостные преобразователи перемещений будут оказывать влияние на динамические свойства чувствительного элемента через коэффициент электростатической упругости [1, 8].
Таким образом, собственные частоты чувствительного элемента акселерометра будут определяться выражениями:
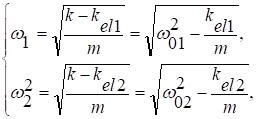
(4).
где k — жесткость подвеса чувствительного элемента; kel1, kel2 — коэффициенты электростатической упругости, вычисляемые из уравнений:
(5).
Поведенческая модель. На основе математической модели (1) с учетом выражений (2 — 5) была разработана поведенческая модель сенсора линейных ускорений с двумя осями чувствительности.
На рисунке 2 представлена поведенческая модель акселерометра, разработанная для моделирования в среде Simulink программного пакета MatLab.
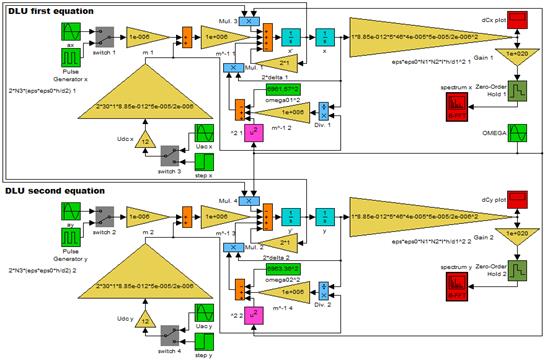
Рис. 2. — Поведенческая модель сенсора линейных ускорений с двумя осями чувствительности
С применением прямых и обратных связей на главные сумматоры подаются одночлены из уравнений: сигналы со входов системы, собственно переменные состояния и их первые производные с требуемыми знаками (плюс или минус в зависимости от знака в уравнении) и коэффициентами. На входах системы оказываются переменные, не относящиеся к переменным состояния, т. е. исходные данные, не являющиеся константами. Именно они играют роль задающих воздействий, характер которых определяется целями управления. Прохождение сигналов по блок-схеме реализуется посредством прямых и обратных связей, усилительных коэффициентов, сумматоров и умножителей в соответствии с уравнениями в переменных состояния.
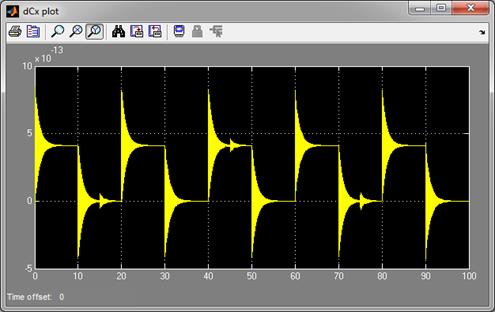
Рис. 3. — Переходной процесс относительно переменной x (измерение линейного ускорения по оси x)
Результаты моделирования. Результаты моделирования динамики синтезированной системы представлены графически на рисунках 3 — 6 в виде переходных процессов и спектрального анализа, имеющих целью исследование параметров демпфирования и частотных свойств объекта. Переходные процессы являются реакцией системы на прямоугольные импульсы (именно по этим законам в рамках поставленного эксперимента изменяются во времени линейные ускорения ax, ay). Спектральным анализом отражены собственные резонансы системы на частотах щ01 и щ02.
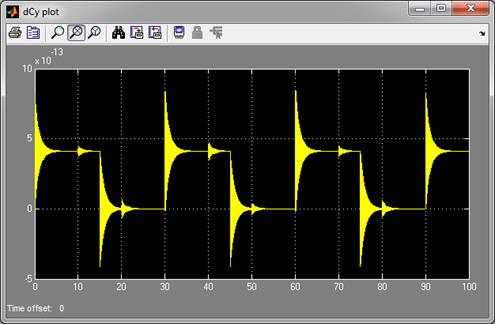
Рис. 4. — Переходной процесс относительно переменной y (измерение линейного ускорения по оси y)
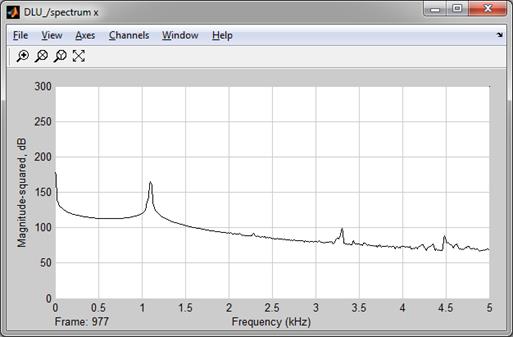
Рис. 5. — Спектральная мощность переменной x
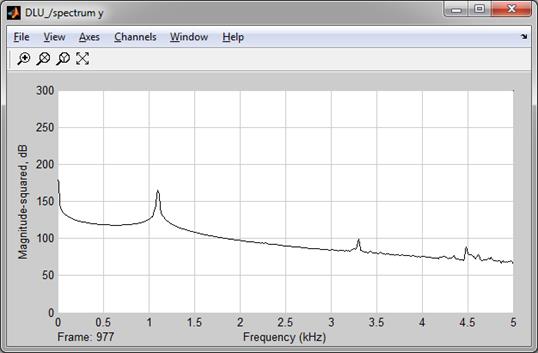
Рис. 6. — Спектральная мощность переменной y
В ходе моделирования акселерометра периоды импульсов имеют следующие значения: на входе переменной ax — 20 с, на входе переменной ay — 30 с.
Заключение
Моделированием подтверждена корректная работа сенсора линейных ускорений с двумя осями чувствительности. В ходе эксперимента была выявлена высокая добротность колебательной системы, обусловленная малым демпфированием и отраженная медленным затуханием переходных процессов, а также ярко выраженными резонансами.
Результаты исследований, изложенные в данной статье, получены при финансовой поддержке Минобрнауки РФ в рамках реализации проекта «Создание высокотехнологичного производства для изготовления комплексных реконфигурируемых систем высокоточного позиционирования объектов на основе спутниковых систем навигации, локальных сетей лазерных и СВЧ маяков и МЭМС технологии» по постановлению правительства № 218 от 09.04.2010 г. Исследования проводились в Южном федеральном университете (г. Ростов-на-Дону).
- 1. Распопов В. Я. Микромеханические приборы. Тула: Тульский государственный университет, 2007. 400 с.
- 2. Тимошенков С. П., Кульчицкий А. П. Применение МЭМС-сенсоров в системах навигации и ориентации подвижных объектов // Нано — и микросистемная техника. 2012. № 6. С. 51 — 56.
- 3. Аравин В. В., Вернер В. Д., Сауров А. Н., Мальцев П. П. МЭМС высокого уровня — возможный путь развития МЭМС в России // Нано — и микросистемная техника. 2011. № 6. С. 28 — 31.
- 4. Прокофьев И. В., Тихонов Р. Д. Нано — и микросистемы для мониторинга параметров движения транспортных средств // Нано — и микросистемная техника. 2011. № 12. С. 48 — 50.
- 5. Анчурин С. А., Максимов В. Н., Морозов Е. С., Головань А. С., Шилов В. Ф. Блок инерциальных датчиков // Нано — и микросистемная техника. 2011. № 1. С. 50 — 53.
- 6. Elwenspoek, M. and R. Wiegerink, 2005. Silicon micro accelerometers. Mechanical microsensors, pp: 230 — 236.
- 7. Alper, S.E., K. Azgin and T. Akin, 2007. A high-performance silicon-on-insulator MEMS gyroscope operating at atmospheric pressure. Sensors and Actuators A, 135: 34 — 42.
- 8. Lysenko, I.E., 2013. Modeling of the micromachined angular rate and linear acceleration sensors LL-type with redirect of drive and sense axis. World Applied Sciences Journal, 27 (6): 759 — 762.
- 9. Коноплев Б. Г., Лысенко И. Е., Шерова Е. В. Интегральный сенсор угловых скоростей и линейных ускорений // Инженерный вестник Дона, 2010, № 3 URL: ivdon.ru/ru/magazine/archive/n3y2010/240.
- 10. Лысенко И. Е., Ежова О. А. Критерии равенства собственных частот колебаний чувствительных элементов микромеханических гироскопов-акселерометров // Инженерный вестник Дона, 2014, № 2 URL: ivdon.ru/ru/magazine/archive/n2y2014/2475.
- 11. Лысенко И. Е. Моделирование двухосевого микромеханического сенсора угловых скоростей и линейных ускорений LR-типа // Инженерный вестник Дона, 2013, № 1 URL: ivdon.ru/ru/magazine/archive/n1y2013/1549.