Суть модельного эксперимента
Фильтр также вносит свое запаздывание, поэтому сравнение исходного сигнала и результата преобразования при условии, что оба эти сигнала пропущены через идентичные фильтры, все же не дает достаточного совпадения, как показано на рис. 12.9. На рис. 12.10 даны эти же сигналы с учетом сдвига, т. е. в исходный сигнал внесено дополнительное запаздывание на половину периода частоты преобразования… Читать ещё >
Суть модельного эксперимента (реферат, курсовая, диплом, контрольная)
Требования теоремы Котельникова нельзя понимать буквально. Ошибкой было бы думать, что обеспечение условий соотношения (5.4) или (5.5) обеспечивает достаточно точное преобразование аналогового сигнала (т.е. его последующее восстановление в цифровом виде с достаточно малой погрешностью). На деле прагматический подход, состоящий в предположении, что частота квантования должна в 10 и более раз превышать верхнюю границу частотного спектра входного сигнала, дает лучшие результаты, поскольку преобразуемый сигнал не бесконечен во времени, метод фильтрации и метод восстановления не оптимален и т. д.
Для наглядности осуществим моделирование преобразования сигнала в программе VisSim.
Поскольку чисто гармонический сигнал преобразовывать неинтересно, можно при этом упустить некоторые тонкости, будем преобразовывать сумму двух квазигармонических сигналов. Вид этих сигналов показан на рис. 12.1 и 12.2. Период самой высокой частоты в этом сигнале примерно можно считать равным 3 с.
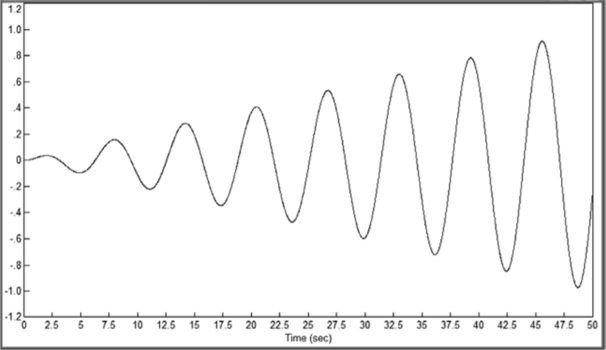
Рис. 12.1. Квазигармонический сигнал с линейно нарастающей амплитудой, частота равна 1 рад/с.
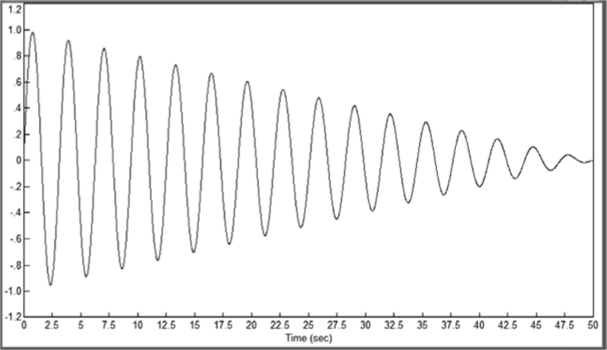
Рис. 12.2. Квазигармонический сигнал с линейно ниспадающей амплитудой, частота равна 2 рад/с.
Исходя из этих условий, преобразование с периодом 1,4 с отвечает требованиям теоремы. Это в полной мере относится не только к каждому сигналу в отдельности, но и к сумме этих сигналов, которая показана на рис. 12.3.
При моделировании работы АЦП вначале используем период преобразования, равный 0,4 с, чтобы на интервале, равном периоду наивысшей частоты, было существенно больше чем два отсчета. На рис. 12.4 показан результат преобразования этого сигнала, на рис. 12.5 исходный сигнал и результат преобразования объединены в одних осях для наглядности, на рис. 12.6 показана ошибка преобразования.
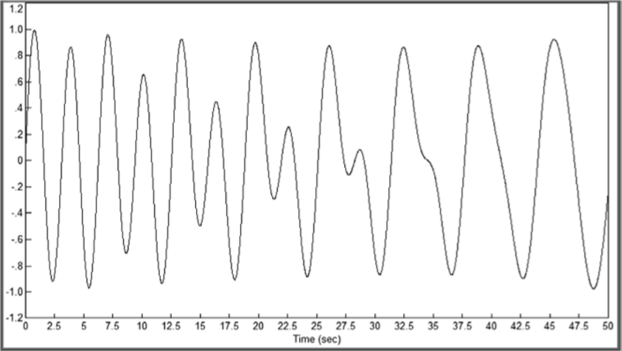
Рис. 12.3. Преобразуемый сигнал, являющийся суммой сигналов по рис. 12.1 и 12.2.
Ошибка преобразования для графика на рис. 12.6 получена простым вычитанием из исходного сигнала результата его преобразования. Эта ошибка слишком велика, так как в пиковом значении она достигает 70% амплитуды входного сигнала. Это объясняется недостаточно корректным сравнением результатов, что легко исправить. Операция преобразования получает исходный сигнал и поддерживает его неизменным на протяжении всего времени до следующего преобразования, тогда как на самом деле этот отсчет относится к моменту начала ступенчатого сигнала, формируемого преобразователем.
Следовательно, для восстановления истинной шкалы времени результат преобразования следует сдвинуть на половину периода преобразования влево, но поскольку сдвиг во времени вперед невозможен, осуществим задержку исходного сигнала на время, равное половине периода преобразования. Ошибка преобразования, вычисленная после такой коррекции, показана на рис. 12.7, она явно меньше, чем ошибка, показанная ранее на рис. 12.6, и все же еще слишком велика: в пиковом значении достигает 40% амплитуды входного сигнала.
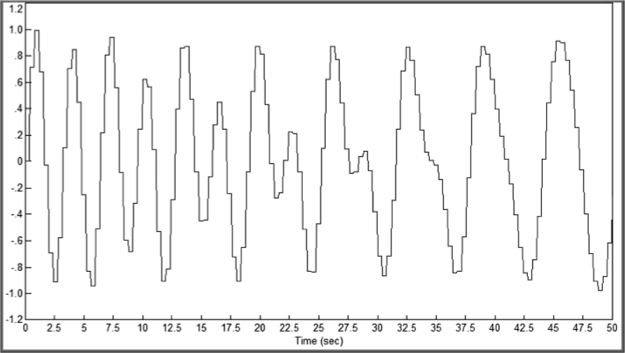
Рис. 12.4. Результат преобразования сигнала по рис. 12.3 при периоде преобразования 0,4 с.
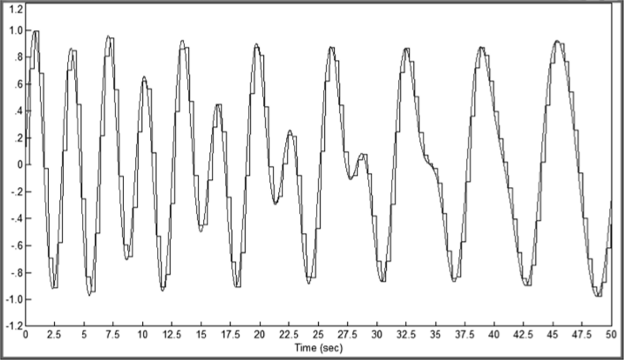
Рис. 12.5. Исходный сигнал и результат его преобразования в одних осях для сравнения.
На рис. 12.8 даны для сравнения исходный сигнал и результат преобразования после фильтрации, но без указанного сдвига. При этом фильтр используется с передаточной функцией следующего вида:

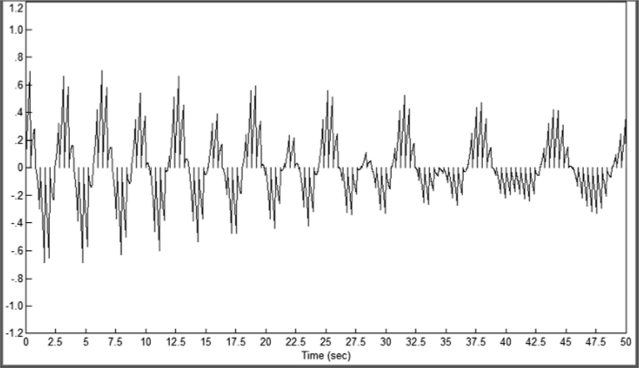
Рис. 12.6. Ошибка преобразования, получаемая вычитанием из исходного сигнала результата его преобразования.
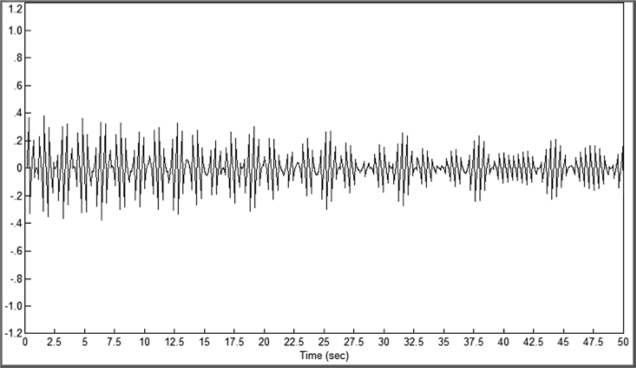
Рис. 12.7. Ошибка преобразования после уточнения вносимого запаздывания операцией преобразования, равного половине периода преобразования; данный результат получен путем вычитания из исходного сигнала, задержанного на 0,2 с, сигнала, полученного в результате преобразования.
Фильтр также вносит свое запаздывание, поэтому сравнение исходного сигнала и результата преобразования при условии, что оба эти сигнала пропущены через идентичные фильтры, все же не дает достаточного совпадения, как показано на рис. 12.9. На рис. 12.10 даны эти же сигналы с учетом сдвига, т. е. в исходный сигнал внесено дополнительное запаздывание на половину периода частоты преобразования. Видно, что полученные сигналы почти полностью совпадают. Ошибка преобразования — это разность этих сигналов. Она показана на рис. 12.11, при этом масштаб увеличен в 20 раз. Видно, сколь мала ошибка преобразования в данном случае: в пиковом значении она достигает лишь 3% амплитуды входного сигнала.
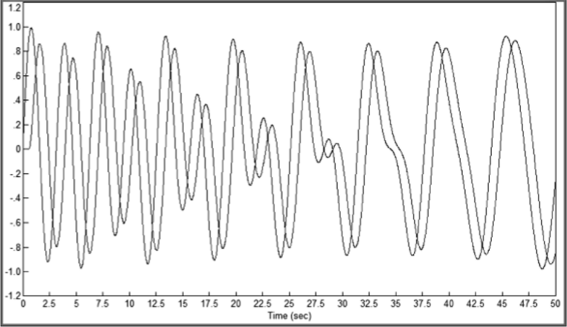
Рис. 12.8. Сравнение исходного сигнала и сигнала, полученного в результате преобразования и последующей фильтрации.
Хотя оставшийся шум на уровне 3% по-прежнему слишком велик, следует учесть, что примененный фильтр излишне широк для этого случая. Также далее будет показано, что свой вклад в остаточную ошибку вносит недостаточная точность моделирования, связанная с выбранным шагом интегрирования.
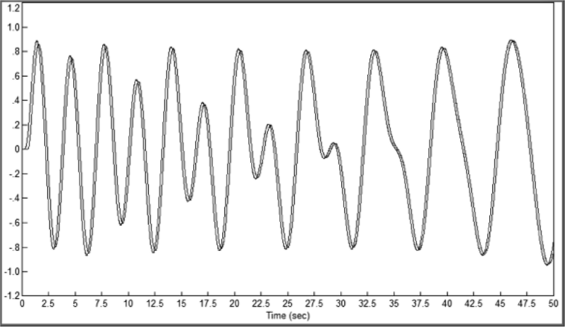
Рис. 12.9. Сравнение исходного сигнала и сигнала, полученного в результате преобразования, после того, как оба сигнала подверглись идентичной последующей фильтрации.
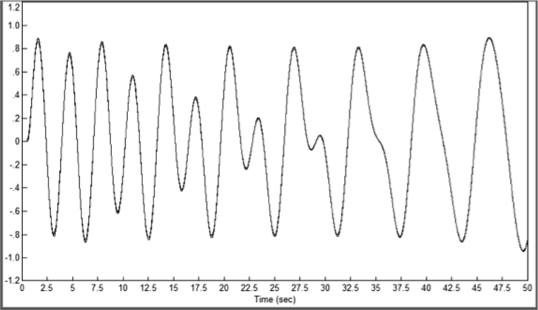
Рис. 12.10. То же, что на рис. 12.9, с введением дополнительного запаздывания в исходный сигнал на величину 0,2 с.
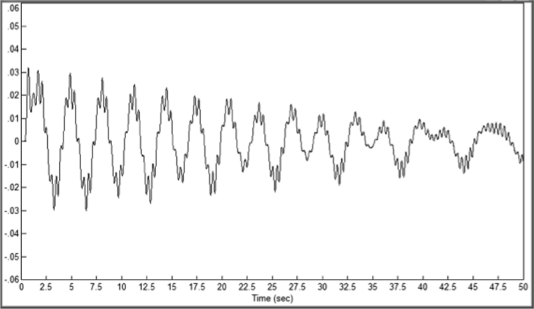
Рис. 12.11. Ошибка преобразования, полученная вычитанием двух графиков из рис. 12.10, с последующим увеличением масштаба по оси ординат в 20 раз.
На рис. 12.12 показан сигнал с добавлением гауссовых шумов, что применено для исследования вопроса о том, как высокочастотные шумы проявляются при преобразовании. Результат преобразования этого сигнала показан на рис. 12.13. На рис. 12.14 показана ошибка преобразования, определенная по простейшему алгоритму, т. е. вычитанием преобразованного сигнала из исходного.
На рис. 12.15 даны в одних осях преобразованный сигнал, пропущенный через фильтр, и исходный сигнал, пропущенный через идентичный фильтр и после этого задержанный на половину периода преобразования. На рис. 12.16 показана ошибка преобразования, вычисленная вычитанием двух сигналов из рис. 12.15. После учета запаздываний, так же, как было сделано на рис. 12.11, ошибка существенно уменьшается, как показано на рис. 12.16.
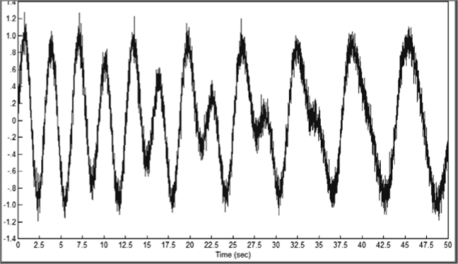
Рис. 12.12. Вид исходного сигнала при добавлении в него гауссовых шумов (стандартное отклонение 0,1)
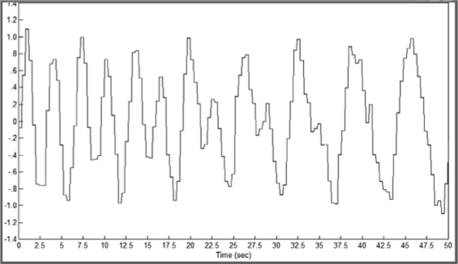
Рис. 12.13. Результат преобразования сигнала по рис. 12.12 при тех же условиях
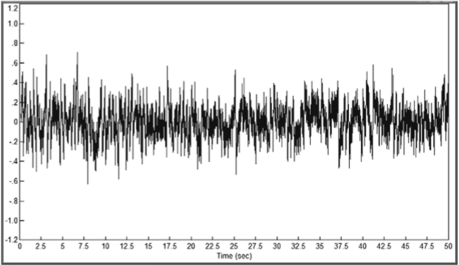
Рис. 12.14. Ошибка преобразования (отличие сигнала на рис. 12.13 от сигнала на рис. 12.12)
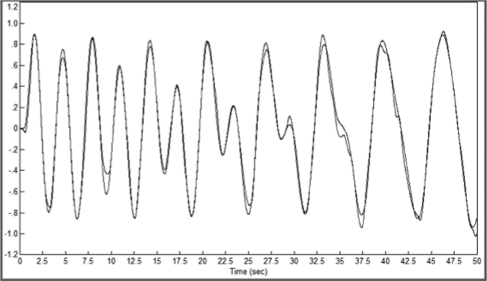
Рис. 12.15. В одних осях преобразованный сигнал и исходный сигнал, с соответствующей фильтрацией
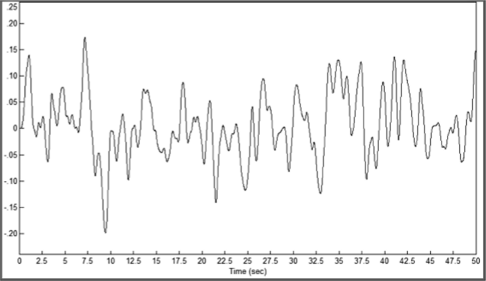
Рис. 12.16. Ошибка преобразования в условиях шумов, аналогично рис. 12.11, масштаб увеличен только в пять раз
Покажем, что увеличение частоты преобразования эффективно снижает ошибку преобразования. На рис. 12.17 показана ошибка преобразования (без фильтрации и задержки) в результате того, что частота преобразования увеличена в четыре раза. На рис. 12.18 — совмещенные исходный сигнал и результат преобразования. На рис. 12.19 показана ошибка после применения всех мер компенсации задержек. В пиковом значении ошибка уменьшилась в три раза по сравнению с результатом, показанным на рис. 12.16.
Если и далее повышать частоту преобразования, ошибка также уменьшается, что иллюстрируют аналогичные графики на рис. 12.20— 12.22.
Если же частоту преобразования уменьшить, то ошибка увеличивается, что иллюстрируют аналогичные графики на рис. 12.23—12.25. При добавлении гауссовых шумов ситуация еще больше ухудшается.
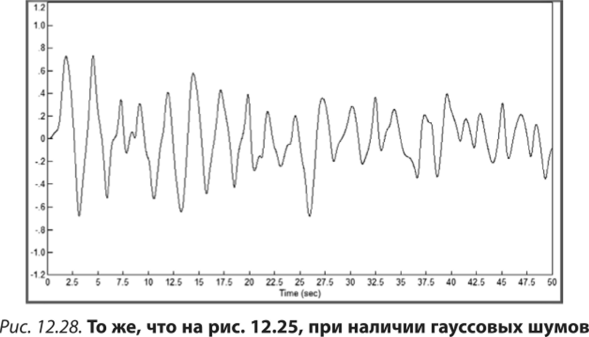
На рис. 12.26 показаны сигнал с гауссовыми шумами и результат его преобразования. На рис. 12.27 показаны оба этих сигнала после прохождения ими тех же идентичных фильтров. На рис. 12.28 показана ошибка преобразования для этого случая, полученная вычитанием сигналов, показанных на рис. 12.27, друг из друга.
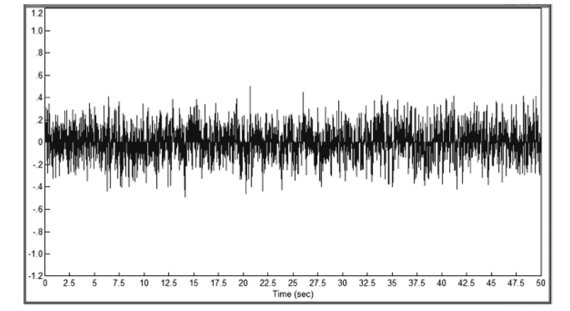
Рис. 12.17. Ошибка преобразования в тех же условиях по сигналу и шумам без фильтрации и задержки при увеличении частоты преобразования в четыре раза (период равен 0,1 с).
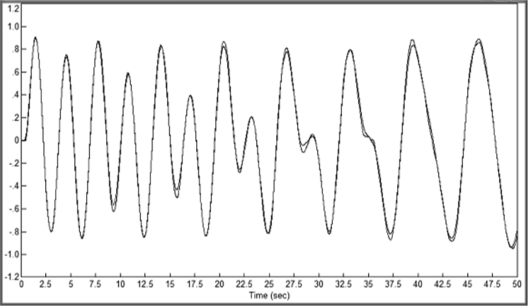
Рис. 12.18. Исходный сигнал с фильтрацией и задержкой и результат преобразования с фильтрацией в тех же условиях, при увеличении частоты преобразования в четыре раза (как на рис. 12.17).
Как видно из этого результата, наличие высокочастотных шумов существенно увеличивает ошибку преобразования. Применение более высокой частоты преобразования, хотя и не столь высокой, чтобы высокочастотные гауссовы шумы стали удовлетворять условиям теоремы Котельникова, позволяет многократно снизить указанную ошибку, порождаемую гауссовыми шумами.
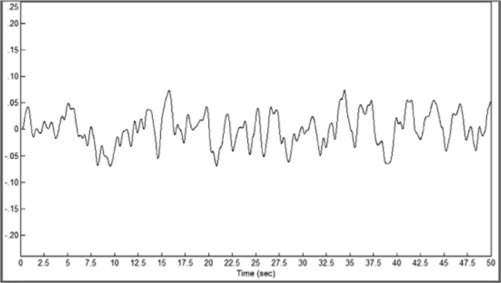
Рис. 12.19. Ошибка результата преобразования в тех же условиях, что на рис. 12.16, при увеличении частоты преобразования в четыре раза (как на рис. 12.17).
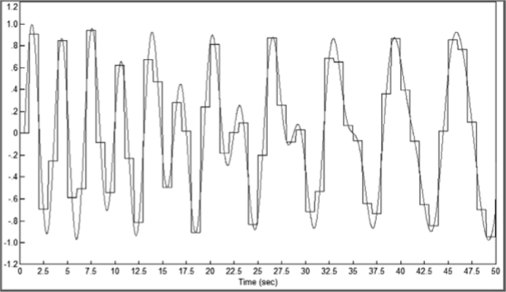
Рис. 12.20. Исходный сигнал и результат преобразования при периоде преобразования, равном 1 с (в 2,5 раза выше, чем в первом эксперименте); шумы отсутствуют.
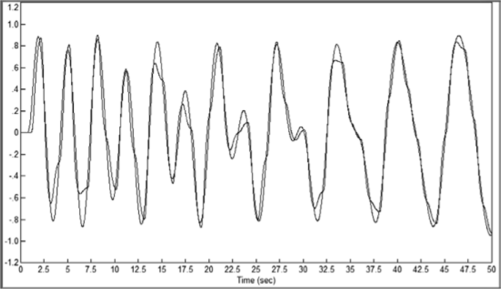
Рис. 12.21. Исходный сигнал после фильтрации и задержки и результат преобразования по рис. 12.20 после фильтрации.
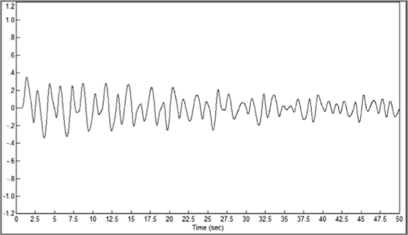
Рис. 12.22. Ошибка преобразования (разность сигналов на рис. 12.21), масштаб тот же, что на рис. 12.21.
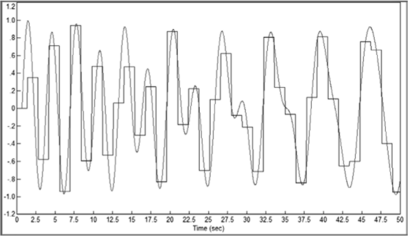
Рис. 12.23. Исходный сигнал и результат преобразования при изменении частоты преобразования (период равен 1,4 с).
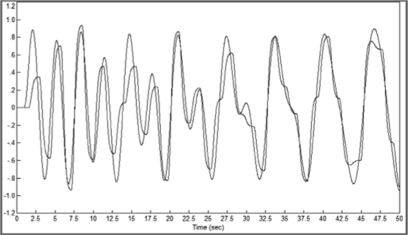
Рис. 12.24. Исходный сигнал после фильтрации и задержки и результат преобразования по рис. 12.20 после фильтрации при изменении частоты преобразования (как на рис. 12.23).
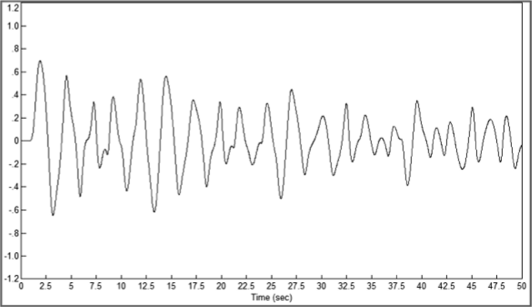
Рис. 12.25. Ошибка преобразования (разность сигналов на рис. 12.24), масштаб тот же, что на рис. 12.24.
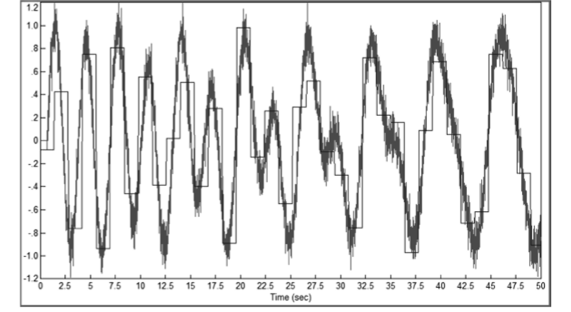
Рис. 12.26. То же, что на рис. 12.23, при наличии гауссовых шумов.
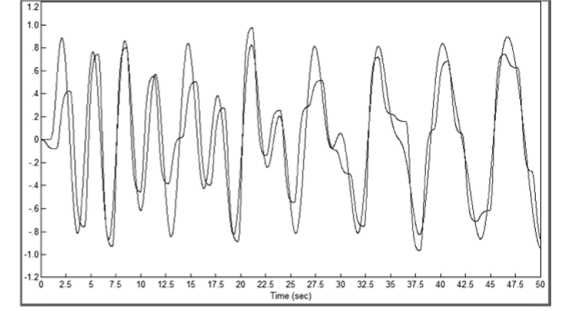
Рис. 12.27. То же, что на рис. 12.24, при наличии гауссовых шумов.
Действительно, на рис. 12.29 показаны тот же входной сигнал с теми же гауссовыми шумами и результат его преобразования при увеличении частоты преобразования в 75 раз, а именно: период преобразования стал 0,02 с. На рис. 12.30 показаны оба сигнала после фильтрации при внесении соответствующего запаздывания во входной сигнал, равного половине периода преобразования. Видно, что визуально эти сигналы совпадают.
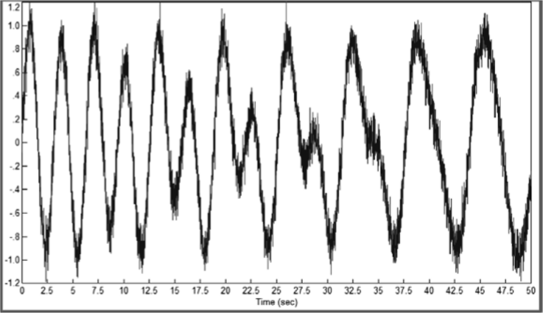
Рис. 12.29. То же, что на рис. 12.26, при увеличении частоты преобразования в 75 раз (период преобразования равен 0,02 с).
На рис. 12.31 показана ошибка преобразования, вычисленная как разница между двумя сигналами, показанными на рис. 12.30. Для наглядности масштаб сохранен, так же, как и на рис. 12.25. Видно, что ошибка резко уменьшилась.
Рассмотрим работу АЦП без гауссовых шумов при указанной высокой частоте преобразования. Вид ошибки преобразования в этом случае показан на рис. 12.32. При этом масштаб по оси ординат увеличен в 100 раз. Пиковое значение погрешности составляет 0,8%.
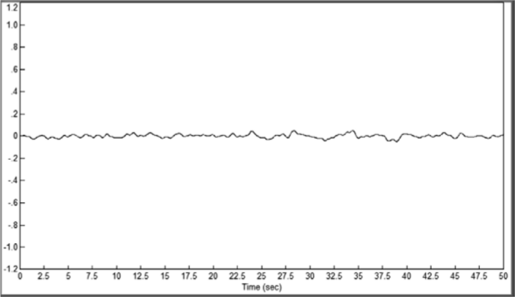
Рис. 12.31. Ошибка преобразования (разница сигналов на рис. 12.30), масштаб тот же, что на рис. 12.30.
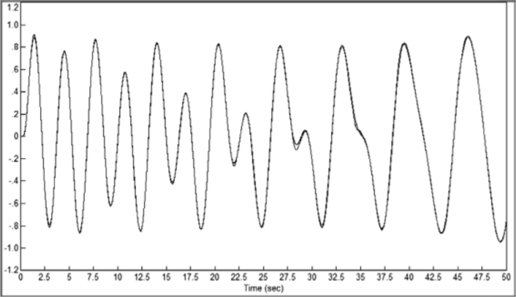
Рис. 12.30. Разница входного сигнала (после фильтрации и сдвига) и результата преобразования при условиях по рис. 12.29 (гауссов шум, период преобразования 0,02 с).
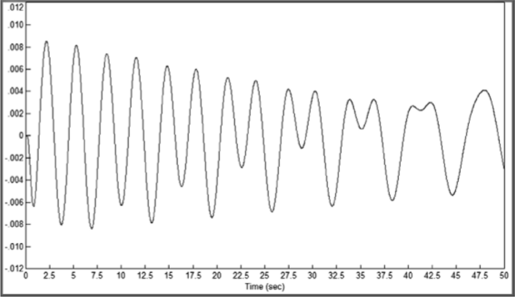
Рис. 12.32. Ошибка преобразования для этого же случая при отсутствии шумов: масштаб по оси ординат увеличен в 100 раз.
В этом случае уже сказывается недостаточная точность моделирования, что проявляется в том, что при уменьшении шага квантования по времени (называемого шагом интегрирования) вдвое ошибка преобразования также падает вдвое, что показано на рис. 12.33.
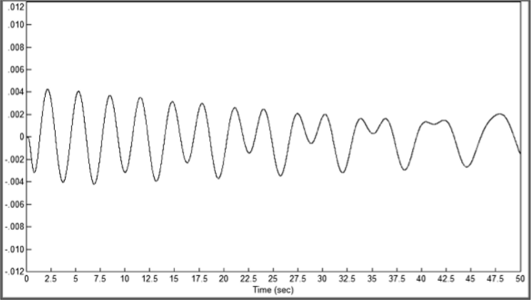
Рис. 12.33. То же, что и на рис. 12.32, при уменьшении вдвое шага интегрирования при моделировании: ошибка преобразования уменьшилась в два раза.
Покажем, что ошибка преобразования все же зависит не только и не столько от шага интегрирования, и что ранее выполненное моделирование дает корректные выводы. Для этого, сохраняя указанное уменьшенное значение шага интегрирования, начнем увеличивать период преобразования. Результат показан на рис. 12.34.

Рис. 12.34. То же, что и на рис. 12.33, при увеличении периода преобразования:
1 — 0,08 с; 2 — 0,16 с; 3 — 0,32 с При увеличении периода до значения 0,8 с ошибка увеличивается незначительно. При дальнейшем удвоении периода ошибка увеличилась примерно на 10% ее значения и достигла 0,5% входного сигнала. При следующем удвоении периода преобразования ошибка возросла более чем втрое, в пиковом значении достигла 1,75% амплитуды входного сигнала. На рис. 12.35 приведена схема для формирования тестового сигнала и моделирования работы АЦП, а на рис. 12.36 приведена схема для моделирования фильтров.
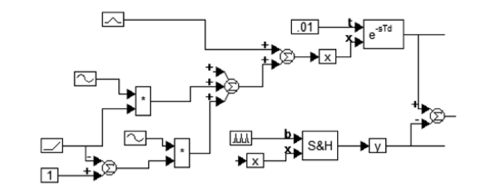
Рис. 12.35. Структура для моделирования источника преобразуемого сигнала, генератора шума и АЦП (имитируется устройством выборки-хранения «S&H»).
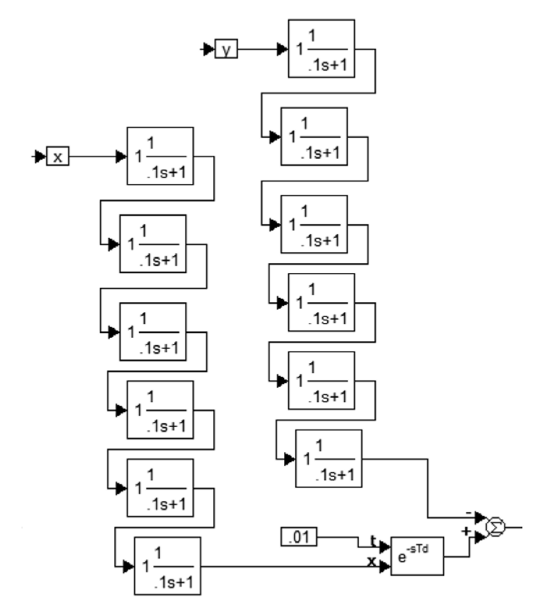
Рис. 12.36. Структура для моделирования двух фильтров и звена запаздывания (к рис. 12.31).