Угломерные радионавигационные системы
Сигнал задающего генератора (ЗГ) поступает на два модулятора (М, и М,), на которые с генераторов Г, и Г, подаются модулирующие сигналы с частотами Ft и F,. Далее эти два модулированных сигнала поступают каждый на свою антенну. ДН антенн немного перекрываются, образуя равносигнальную зону (РСЗ). Приемник на самолете принимает эти сигналы на ненаправленную антенну, демодулирует и с помощью фильтров… Читать ещё >
Угломерные радионавигационные системы (реферат, курсовая, диплом, контрольная)
Угломерные амплитудные системы были первыми РНС и получили широкое применение. Системы выполняются как с использованисм направленного излучения, так и направленного приема. В первом елучас речь идет о направленных радиомаяках, установленных в РЫТ, а в месте определения азимута используется радиоприемное устройство с ненаправленной антенной, обрабатывающее радиосигнал с целью выделения информации о направлении от маяка на точку приема. Во втором случае в РНТ устанавливаегся радиопередающее устройство с ненаправленной антенной, а в точке определения направления имеется приемное устройство с направленной антенной. Такое устройство называют радиопеленгатором. Пеленгом называют угол между направлениями на источник излучения и север.
На начальном этапе развития систем с радиопеленгатором использовался принцип, когда направление на источник сигнала определялось по положению антенны, при котором сигнал достигал максимальной или минимальной интенсивности. В дальнейшем были разработаны автоматические радиопеленгаторы, в которых без участия оператора пеленг выводится либо на указатель и в дальнейшем используется в навигационных целях, либо поступает в систему для дальнейшей автоматической обработки. Радиопеленгаторы, используемые в РНС, обладают своей спецификой. В первую очередь, это необходимость определения направления за пределами прямой видимости, в диапазонах от сверхдлинных до средних волн и, следовательно, невозможность получения узконаправленных диаграмм направленности антенн. Для пеленгования часто используют рамочные антенны с диаграммой направленности в виде восьмерки (см. рис. 6.74). Для разделения сигналов от направленных и ненаправленных радиомаяков используют разные несущие частоты. В амплитудных (угломерных) РИС в основном применяются радиопеленгаторы, работающие на принципах «сравнения амплитуд», «следящие» и с «модуляцией амплитуды».
Рассмотрим угломерную РНС, построенную на принципе сравнения амплитуд. Это автоматический радиопеленгатор (АРП), в котором положение антенной системы неизменно. Антенная система состоит из двух антенн, расположенных друг относительно друга под углом в 90°. Соответственно так же располагаются их диаграммы направленности (рис. 6.76).
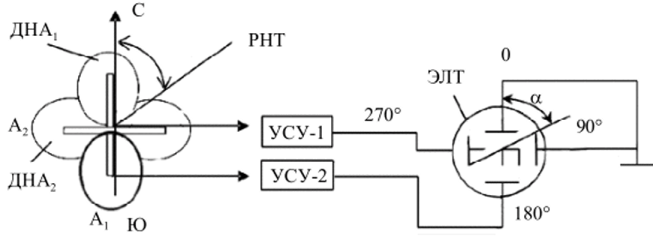
Рис. 6.76. Автоматический радиопеленгатор, использующий сравнение амплитуд.
Антенны А, и А2 — рамочные с диаграммами направленности ДНА, и ДНА2. Антенны соединены каждая со своим приемным устройством — устройством селекции и усиления УСУ-1 и УСУ-2. На электронно-лучевой трубке (ЭЛТ) на экране формируется линия пеленга, положение которого совпадает с направлением на РНТ. Необходимое условие — идентичность каналов. В антеннах А, и А2 наводитяся напряжения.

На отклоняющие пластины индикатора поступают сигналы:

По координатам х и у положение линии пеленга х = ?1ин АГин1
И У ~ *^2ин ^НН2;
Результирующее положение пеленга на экране индикатора.

где ф, = фЛ.0 — Лф,; ф2 = фл0 — Аф.
В случае идентичности каналов.

На экране по положению линии зрительно определяется пеленг. Погрешности при определении пеленга связаны с невыполнением условий идентичности каналов (6.73).
Безусловно, индикаторное устройство в виде ЭЛТ необязательно. Оно приведено для наглядности. Нс составляет труда выведение значения пеленга в цифровом виде. Особенностями рассмотренного типа радиопеленгаторов является:
- а) возможность осуществления пеленгования любых сигналов, в том числе импульсных. Модуляция сигналов не влияет на точность;
- б) точность онределяегся параметрами ЭЛТ (фокусировкой), неидсальностью приемного устройства, а также искажениями фронта электромагнитной волны. Величина погрешности порядка 1 — 2°;
- в) система подвержена действию помех, снижающих ее точность.
Наибольшее распространение РНС такого типа получила в морском флоте. АРП устанавливается на кораблях, а береговая зона оборудована радиомаяками (РНТ), расположенными на расстоянии 50 — 200 км друг от друга и излучающими непрерывные сигналы на выделяемой каждому маяку частоте с периодической передачей позывных в телеграфном режиме. Используется среднечастотный диапазон. Ненаправленные береговые маяки имеют мощность до 500 Вт, проволочную антенну высотой до 30 м и должны работать без технического обслуживания. Корабельные АРП просты, антенная система неподвижна. Предусматривается перестройка по частоте — наст ройка на конкретный маяк. Аналогичные устройства используются и в радиоразведке.
Пеленгование на основе использования «модуляции амплитуды» схоже с пеленгованием в обзорных РЛС. В РНС применяются КВи У KB-диапазоны, ан тенны слабонанравленныеДН с одним широким лепестком. Индикатор рабогаег по принципу измерения разносги фаз между опорным напряжением, связанным с вращением антенны, и напряжением на выходе амплитудного детектора. Применяются при пеленговании в зоне аэропорта для управления воздушным движением по сигналам связных УКВ радиостанций самолетов.
Более совершенными являются угломерные РНС со следящим приводом. В автоматических радиопеленгаторах используются две антенны, ДН которых накладываются одна на другую или одна антенна с ДН, периодически меняющей свое положение в пространстве. При пеленговании антенная система автоматически поворачивается до момента равенства интенсивности сигнала на обеих антеннах или же до неизменности интенсивности принимаемого радиосигнала.
Особенностью РНС такого типа является использование среднеи длинноволнового диапазонов. Вследствие этого невозможно обеспечить получение узких ДН и приходится ограничиваться слабонаправленными антеннами. РНТ разделяются использованием разных частот. Принцип действия следящего радиопеленгатора проиллюстрирован на рис. 6.77.
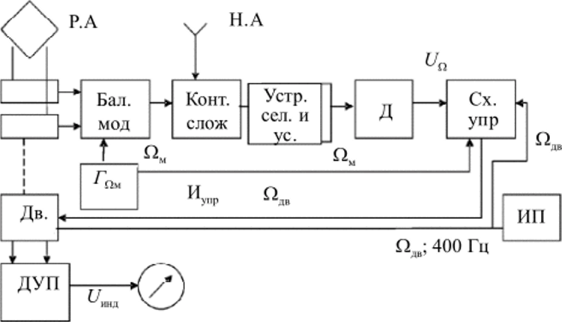
Рис. 6.77. Следящий радиопеленгатор.
Схема содержит две антенны — рамочную (РА) с диаграммой в виде восьмерки и ненаправленную (НА) с круговой диаграммой. Балансный модулятор меняет на к напряжение, поступающее с РА с частотой QM. Сигналы с РА и НА поступают на контур сложения, после которого на вход приемника — устройство селекции и усиления. Продетектированный в демодуляторе (Д) сигнал Un поступает на схему управления двигателем, которая меняет на я фазу напряжения питания, поетупающего на управляющую обмотку двигателя (Дв). Источник питания (ИП) запитывает напряжением с частотой Пдв(400 Гц) сетевую обмотку Дв. Генератор Г!!м подает напряжение с частотой Г2М на балансный модулятор и схему управления двигателем. Информация о положении РА снимается с датчика углового положения (ДУП) и поступает на индикатор. Балансный модулятор с периодом 2я/Ом изменяет на я фазу напряжения Up. Сигнал 6/пр — модулированное напряжение с частотой QM. Эпюры напряжения приведены на рис. 6.78, а, а на рис. 6.78, б показана результирующая диаграмма двух антенн.
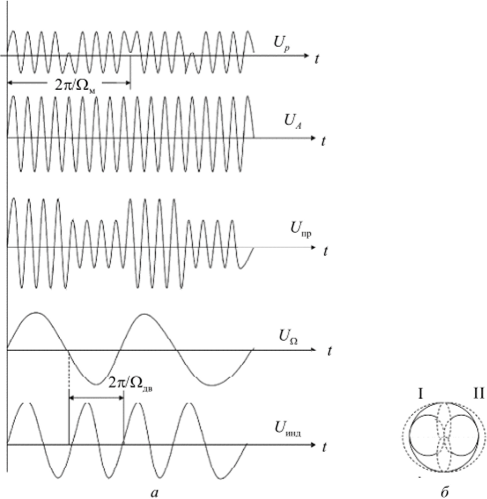
Рис. 6.78. Следящий радиопеленгатор: а — временные диаграммы работы; б — формирование суммарной ДН Балансный модулятор с периодом я/Ом меняет фазу сигнала в рамочной антенне. В результате суммарная ДН РА и НА имеет вид кордиоиды, с периодом 2n/QM меняющей положение — с I на II и обратно. После демодуляции напряжение U() поступает на схему управления и напряжение ?/упр подастся на электродвигатель. При этом ось двигателя поворачивается таким образом, чтобы сигналы от антенн при положении суммарной ДН I и II сравнивались и модуляция исчезала. При установлении плоскости рамки перпендикулярно направлению на РНТ <�Уу[ф становится равным нулю и рамка останавливается. Сигнал с датчика углового положения поступает- на индикатор и фиксируется направление на РНТ. При отклонении РА в другую сторону фазаменяется на я и происходит процесс поворачивания рамки до нулевого напряжения Un. Это — типичная замкнутая следящая система.
Система помехоустойчива, так как QM крайне низкочастотна — менее 1 Гц. Инерционность и узкополосность следящей системы обеспечивает защиту от помех. Радиопеленгаторы такого типа успешно работают с приводными аэродромными радиостанциями. Эти радиопеленгаторы, применяемые на самолетах, называют автоматическими радиокомпасами (АРК). Применяются они давно, но идея, заложенная в структурной схеме, сохранилась. Интересно формирование с помощью слабонаправленной и ненаправленной антенн некой равносигналыюй зоны, подобной используемой в следящих РЛС.
Измеряя с помощью магнитного компаса положение продольной оси самолета относительно направления на север и пеленгуя последовательно две РНТ, можно определить свое положение. Однако с учетом высокой скорости самолета, это достаточно неточная и громоздкая процедура: самолет меняет свое положение за время вычислений. Такая штурманская рабога более целесообразна в кораблевождении, где она и используется.
В авиации приводные аэродромные радиостанции (ПАР) и АРК применяются при движении по прямым маршрутам. Этот режим называют «привод на аэродром». Он обеспечивает выход на ПАР при наличии бокового ветра и ошибок. Так как корпус самолета искажает электромагнитное поле, возникает специфическая ошибка в показаниях АРК — радиодсвиация.
Кроме радиопеленгаторов, используются амплитудные РНС с направленным излучением (направленные радиомаяки). Громоздкая аппаратура размещается на земле в РНТ, а пеленг измеряется простым приемным устройством с ненаправленной антенной. Бортовая система работает автоматически, выдавая информацию на простой индикатор.
Основное применение получили радиомаяки с вращающейся ДН, позволяющие определять в точке приема азимут, для привязки в момент прохождения диаграммой направления на север излучается импульс привязки. Кроме того, используются курсовые радиомаяки, позволяющие самолету двигаться, но направлению, задаваемому радиомаяком. Это реализовано в системе «слепой» посадки. Принцип действия курсового радиомаяка показан на рис. 6.79.
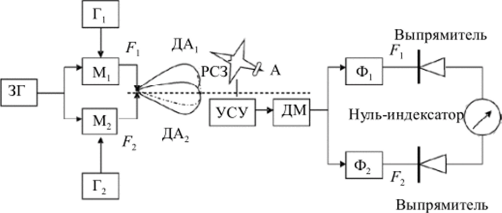
Рис. 6.79. Система «слепой» посадки.
Сигнал задающего генератора (ЗГ) поступает на два модулятора (М, и М,), на которые с генераторов Г, и Г, подаются модулирующие сигналы с частотами Ft и F,. Далее эти два модулированных сигнала поступают каждый на свою антенну. ДН антенн немного перекрываются, образуя равносигнальную зону (РСЗ). Приемник на самолете принимает эти сигналы на ненаправленную антенну, демодулирует и с помощью фильтров (Ф, и Ф,) выделяет сигналы с частохами F, и F2, которые преобразуются в постоянное напряжение выпрямителями и поступают на нуль-индикатор. В случае нахождения самолета в РСЗ сигналы с фильтров Ф, и Ф2 равны и нуль-индикатор показывает равенство этих сигналов. Если же один из них преобладает, то индикатор показывает сторону и величину отклонения.
Маяки такого типа используются в системах «слепой посадки», но необходимо формировать две равносигнальные зоны (плоскости), пересечение которых дает траекторию снижения самолега — глиссаду. Пилот должен выдерживать нулевые положения стрелок индикатора по курсу и глиссаде.
Отметим, что система требует идентичности каналов, что контролируется с помощью соответствующих имитаторов.