Численное моделирование работы синхронного детектора и системы апч
На рис. 10.30 показан выходной сигнал системы в двух случаях. В первом случае на вход системы подан медленно изменяющийся гармонический сигнал, имитирующий медленные девиации частоты относительно среднего значения. Во втором случае сигнал, получаемый в результате детектирования, подается с некоторым коэффициентом в обратную связь, что имитирует действие системы АПЧ. Видно, что результирующее… Читать ещё >
Численное моделирование работы синхронного детектора и системы апч (реферат, курсовая, диплом, контрольная)
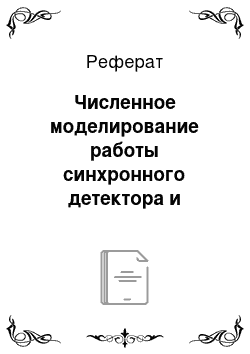
Для моделирования работы СД можно использовать программу VisSim. Для начала смоделируем нелинейную характеристику, имитирующую характеристику коэффициента поглощения ячейки в зависимости от частоты входного излучения. Предположим, что эта характеристика имеет максимум, а ее вид соответствует квадратичной зависимости. На рис. 10.14 показана схема моделирования и сама нелинейная зависимость, полученная в результате подачи на вход этой нелинейности линейно нарастающего сигнала. Модель нс;
линейности имеет вид У = 27 -(5 — Х)~.
При значении ^=5 характеристика имеет плавный максимум. На рис. 10.15−10.17 модель нелинейности свернута в блок, обозначенный Non Unter unit. Многие гладкие зависимости с экстремумом вблизи точки экстремума могут быть с достаточно высокой точностью аппроксимированы как квадратичные. Поэтому данное моделирование адекватно иллюстрирует работу системы АПЧ вблизи точки экстремума резонансного поглощения.
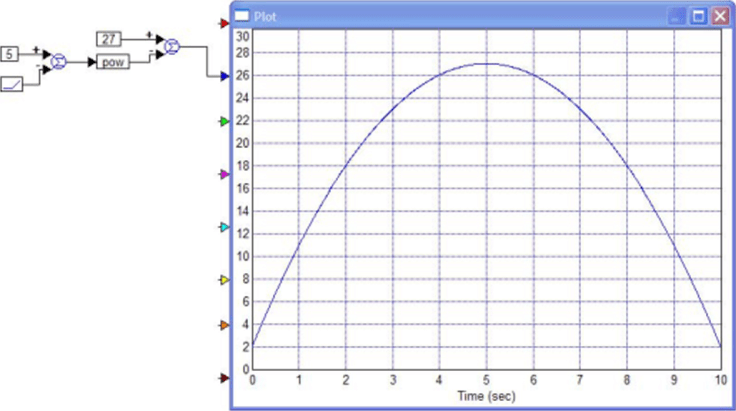
Рис. 10.14. Моделирование нелинейности в программе УіяЗіт.
Если частота меньше резонансного значения (например, среднее ее значение находится левее пика), то наклон положительный. Эту ситуацию иллюстрирует рис. 10.15. Выходной сигнал совпадает по фазе с переменной компонентой входного сигнала. В данном случае переменная компонента входного сигнала моделирует тестовую девиацию частоты, осуществляемую через быстрый модулятор.
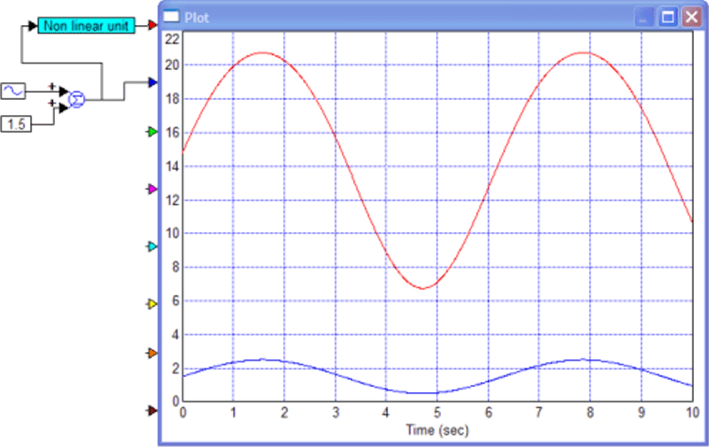
Рис. 10.15.11одуляция сигнала при нахождении на левом склоне.
характеристики Постоянное или медленно изменяющееся смещение входного сигнала моделирует спонтанный дрейф частоты лазерного излучения. В примере, показанном на рис. 10.15, постоянное смещение составляет 2,5 условной единицы. На рис. 10.16 показана ситуация, когда среднее значение частоты излучения соответствует нахождению справа ог экстремума. При этом оно равно 8,5 условной единицы. Видно, что выходной сигнал, моделирующий сигнал с выхода фотоприемника в системе АПЧ, находится в противофазе по отношению к переменной части входного сигнала.
На рис. 10.17 показана ситуация, когда среднее значение частоты соответствует значению экстремума характеристики поглощения. Это значение в данном случае равно пяти условным единицам. Видно, что выходной сигнал представляет собой удвоенную частоту по отношению к частоте сигнала тестовой модуляции. На рис. 10.18−10.32 показаны результаты обработки таких сигналов. Поскольку сигнал с выхода фотоприемника требуется отфильтровать для устранения низкочастотных компонент, применяется фильтр, который неизбежно вносит фазовый сдвиг. В реальной системе этот фазовый сдвиг компенсируется внесением аналогичного сдвига фазы в опорный сигнал. При моделировании обеспечение требуемого равенства фаз легко достигается применением идентичных фильтров для обоих сигналов, т. е. для сигнала, прошедшего через нелинейный элемент, и для опорного сигнала. На рис. 10.18 показаны оба фильтра, а также умножитель сигналов для получения произведения этих двух сигналов один на другой. Графики показывают, что эти сигналы когерентны, если частота находится слева от экстремума (см. рис. 10.15). В этом случае произведение указанных двух сигналов, показанное на рис. 10.19, положительно.
Рис. 10.16. Модуляция сигнала при нахождении на правом склоне.
характеристики На рис. 10.20 показана противоположная ситуация, соответствующая рис. 10.16. Видно, что сигналы на рис. 10.20 находятся в противофазе. Их произведение, показанное на рис. 10.21, отрицательно.
На рис. 20.22 показана ситуация, когда частота совпадает со значением экстремума, как показано на рис. 10.17. Видно, что частота получаемого сигнала вдвое выше частоты тестового сигнала. Кроме того, выходной сигнал заметно меньше по амплитуде. Результат перемножения этих сигналов показан на рис. 20.23. Видно, что этот сигнал знакопеременный и в среднем равен нулю.
На рис. 10.24 показано, как изменяется входной и выходной сигналы в случае линейного дрейфа средней частоты, на рис. 10.25 — перемножаемые для этого случая сигналы, а на рис. 10.26 — результат этого перемножения. Видно, что изначально положительное среднее значение сигнала становится Офицательным. На рис. 10.27−10.29 показаны те же сигналы в случае, когда к входному сигналу примешиваются гауссовы шумы.
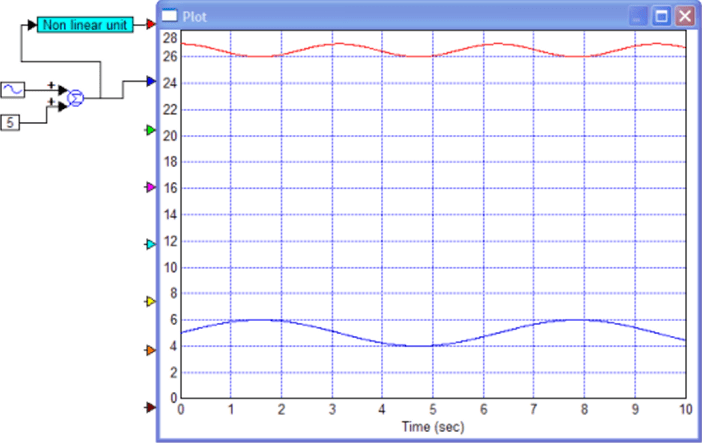
Рис. 10.17. Модуляция сигнала при нахождении в центре характеристики.
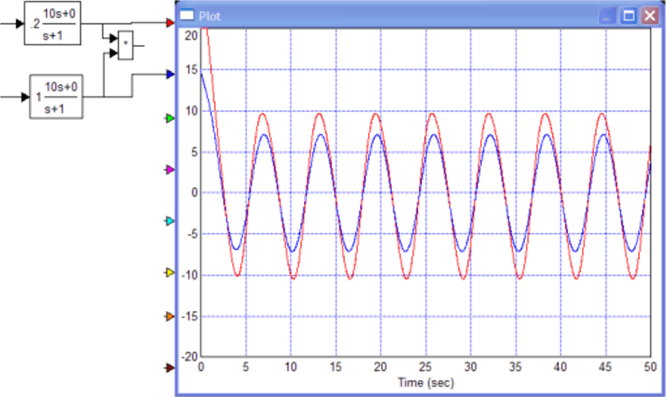
Рис. 10.18. Два фильтрованных сигнала, модулированный и опорный, при нахождении на левом склоне характеристики (также на схеме показан умножитель сигналов для получения произведения этих сигналов).
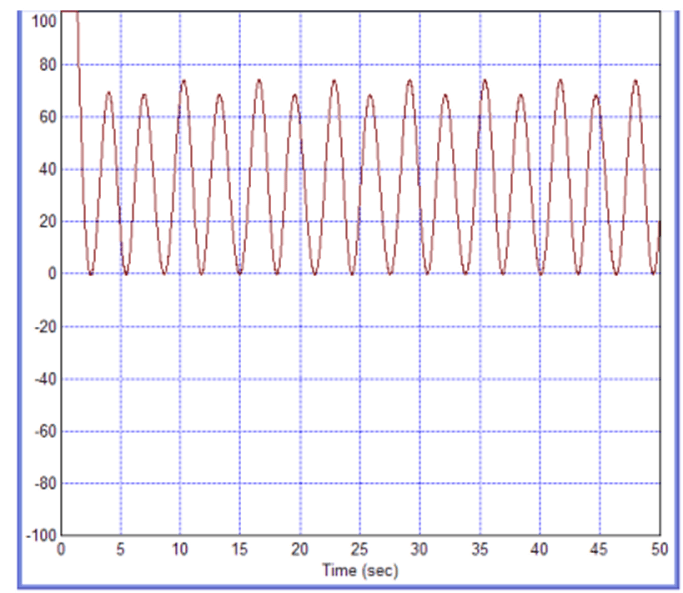
Рис. 10.19. Произведение показанных выше сигналов — результат демодуляции при нахождении на левом склоне характеристики.
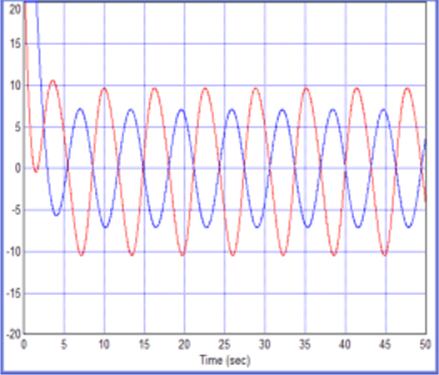
Рис. 10.20. Два фильтрованных сигнала при нахождении на правом склоне характеристики.
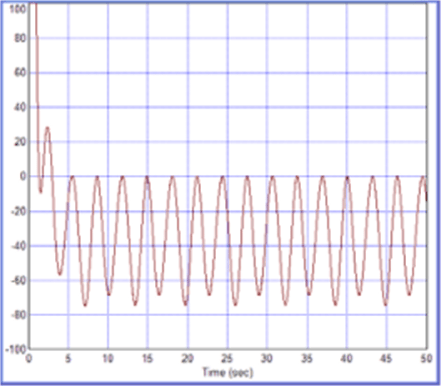
Рис. 10.21. Произведение показанных выше сигналов по рис. 10.20.
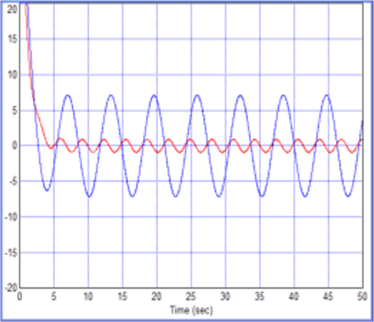
Рис. 10.22. Два фильтрованных сигнала при нахождении в центре характеристики.
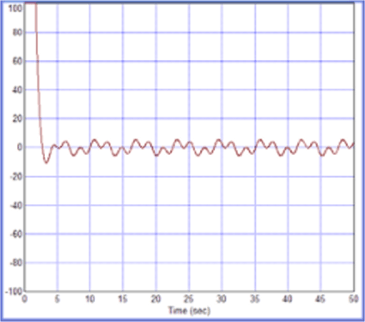
Рис. 10.23. Произведение показанных выше сигналов — результат демодуляции.
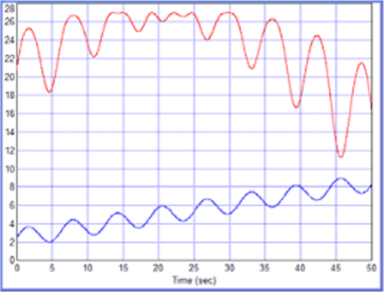
Рис. 10.24. Модуляция сигнала при линейно нарастающем изменении среднего значения смещения.
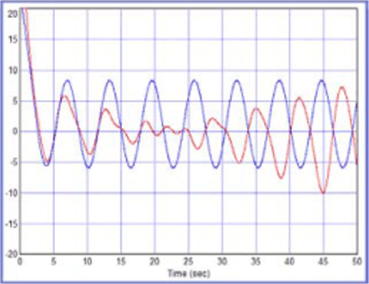
Рис. 10.25. Модулированный и опорный сигналы при линейно нарастающем изменении среднего значения смещения.
На рис. 10.30 показан выходной сигнал системы в двух случаях. В первом случае на вход системы подан медленно изменяющийся гармонический сигнал, имитирующий медленные девиации частоты относительно среднего значения. Во втором случае сигнал, получаемый в результате детектирования, подается с некоторым коэффициентом в обратную связь, что имитирует действие системы АПЧ. Видно, что результирующее отклонение уменьшается. Тем самым моделирование продемонстрировало возможность работы системы по рассмотренному принципу и позволило детально рассмотреть получаемые в такой системе сигналы.
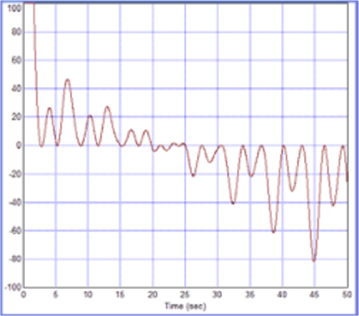
Рис. 10.26. Изменение результата детектирования в ситуации по рис. 10.24.
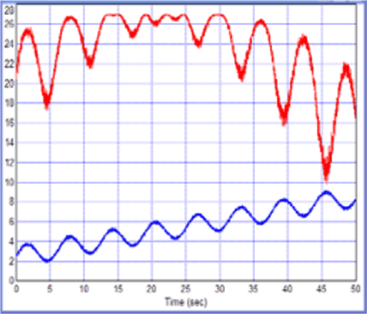
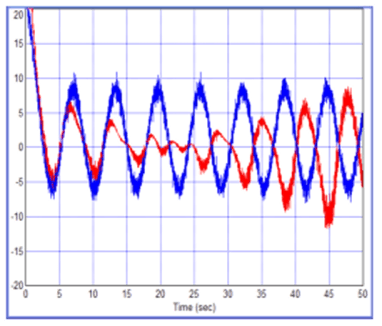
Рис. 10.28. То же, что на рис. 10.25, при наличии гауссовых шумов.
Рис. 10.27. То же, что на рис. 10.24, при наличии гауссовых шумов

Рис. 10.29. То же, что на рис. 10.26, при наличии гауссовых шумов.
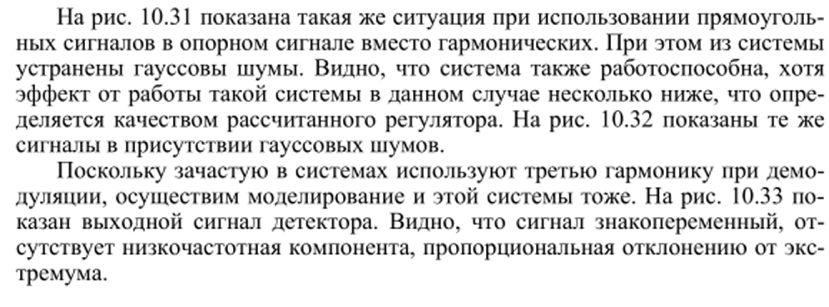

Рис. 10.30. Выходной сигнал 1 системы (аналог частоты излучения лазера) без обратной связи при наличии медленной гармонической модуляции (амплитуда тестовой девиации при этом уменьшена) и этот же сигнал 2 при замыкании пропорциональной обратной связи.
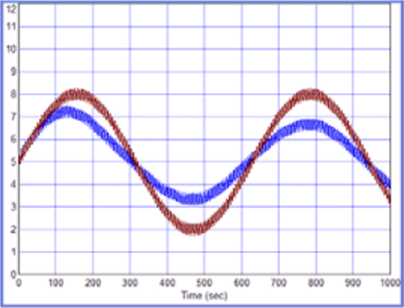
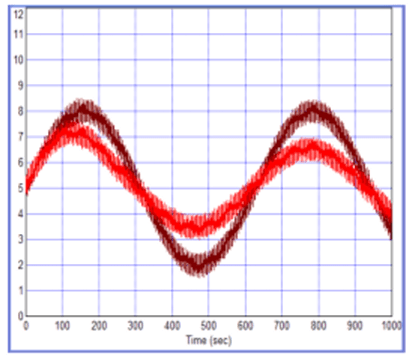
Рис. 10.32. То же, что на рис. 10.31, при использовании прямоугольного сигнала в канале демодуляции при подключении гауссовых шумов.
Рис. 10.31. То же, что на рис. 10.30, при использовании прямоугольного сигнала в канале демодуляции при условии отключения гауссовых шумов
Рис. 10.33. Сигнал на выходе детектора при использовании третьей гармоники при демодуляции.

Изменим используемую характеристику таким образом, чтобы получилась характеристика четвертого порядка. Результат демодуляции такой нелинейности с использованием сигнала основной гармоники показан на рис. 10.35, на рис. 10.36 — результат работы системы, но такому сигналу. Видно, что система работоспособна.
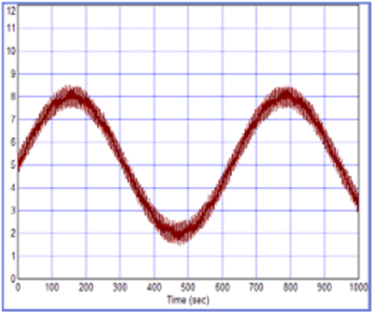
Рис. 10.34. Результат работы системы с обратной связью: сигнал с разомкнутой системой совпадает с сигналом с замкнутой системой.
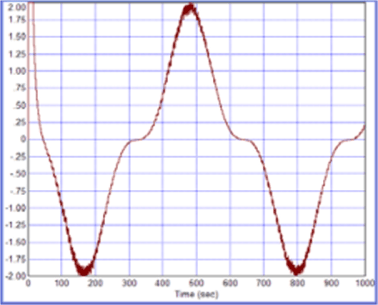
Рис. 10.35. Вид демодулированного сигнала (аналог сигнала на рис. 10.26) после того, как нелинейность изменена с квадратичной на нелинейность четвертого порядка вида У =21 — 0,04 (5 — X)4
На рис. 10.37 показан результат демодуляции такого сигнала с использованием третьей гармоники. Видно, что результат неудовлетворителен. На рис. 10.38 показан результат работы системы с таким сигналом. Видно, что система нс работает, графики с обратной связью и без обратной связи идентичны, т. е. обратная связь не работает.
На рис. 10.39 показан результат детектирования этой нелинейности с прямоугольным сигналом основной гармоники. Видно, что демодуляция достаточно эффективна. На рис. 10.40 показан результат работы системы с таким сигналом. Видно, что система работоспособна, обратная связь уменьшает исходную ошибку. На рис. 10.41 показаны для сравнения гармонический и прямоугольный сигналы, используемые в качестве опорных.
По результатам моделирования можно сделать следующие выводы.
- 1. Принцип действия системы АПЧ с модуляцией достаточно эффективен при использовании первой гармоники.
- 2. Высокочастотная помеха несущественно влияет на результат работы АПЧ.
- 3. Детектирование на третьей гармонике также не дает результата, если вид нелинейности соответствует параболе.
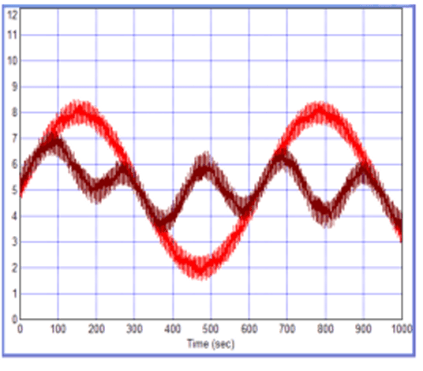
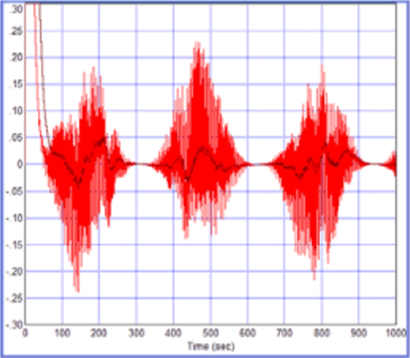
Рис. 10.37. Вид демодулированного сигнала (аналог сигнала на рис. 10.26) после тою, как нелинейность изменена с квадратичной на нелинейность четвертою порядка вида, как на рис. 10.35
Рис. /0.36. Результат подавления помехи за счет системы с обратной связью, работающей, но первой гармонике при нелинейности, показанной нарис. 10.35.
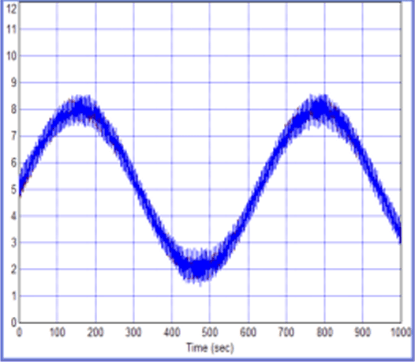
Рис. 10.38. Отрицательный результат подавления помехи (нет результата) за счет системы с обратной связью, работающей, но третьей гармонике, но сигналу, показанному на рис. 10.37 (сигналы в системе с обратной связью и без нее совпадают).
Рис. 10.39. Результат детектирования нелинейности четвертою порядка (аналогично рис. 10.35) при использовании прямоугольного опорного сигнала.
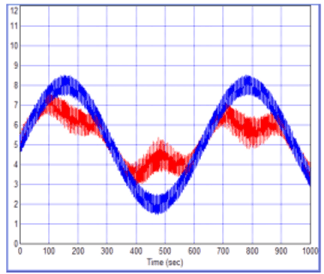
Рис. 10.40. Результат подавления помехи за счет системы с обратной связью, работающей по первой гармонике по сигналу, показанному на рис. 10.39.

Рис. 10.41. Используемый прямоугольный сигнал в экспериментах, результаты которых показаны на рис. 10.39 и 10.40, и гармонический сигнал, использованный в предыдущих экспериментах.
- 4. Детектирование па третьей гармонике нс даст результата и в случае, если вид нелинейности соответствует кривой четвертого порядка.
- 5. При детектировании по первой гармонике можно использовать нс только гармонический сигнал, но и прямоугольный.