Тиристорные коммутационные аппараты и регуляторы с естественной коммутацией

На рис. 5.1, а представлена однофазная схема тиристорного аппарата с ТКЕ. На рис. 5.1, б показана структурная схема системы управления (СУ) тиристорами, которая включает в себя формирователи импульсов ФИ1 и ФИ2, а также входное устройство ВУ, обеспечивающее синхронизацию импульсов с сетевым напряжением. В коммутационном состоянии аппарата «включено» каждый из тиристоров находится в проводящем… Читать ещё >
Тиристорные коммутационные аппараты и регуляторы с естественной коммутацией (реферат, курсовая, диплом, контрольная)
Вспомним, что обычный тиристор является силовым полупроводниковым прибором с неполной управляемостью. Для его выключения необходимо обеспечить снижение прямого тока до нуля и требуемое время выключения, после чего тиристор способен блокировать прямое напряжение. В этой связи различают два основных способа коммутации обычных тиристоров — естественную и искусственную (принудительную). Соответственно, существует два класса тиристорных аппаратов переменного тока: относительно простые аппараты с естественной коммутацией (ТКЕ) и более сложные — с искусственной коммутацией (ТКИ).
На рис. 5.1, а представлена однофазная схема тиристорного аппарата с ТКЕ. На рис. 5.1, б показана структурная схема системы управления (СУ) тиристорами, которая включает в себя формирователи импульсов ФИ1 и ФИ2, а также входное устройство ВУ, обеспечивающее синхронизацию импульсов с сетевым напряжением. В коммутационном состоянии аппарата «включено» каждый из тиристоров находится в проводящем состоянии в течение соответствующего полупериода напряжения сети. При выключении одного тиристора происходит включение другого, для чего к этому моменту на его управляющий электрод должен быть подан отпирающий импульс. При работе на активную нагрузку фазовый сдвиг ф между напряжением и током равен нулю. При активно-индуктивной нагрузке Ф > 0 и изменяется в зависимости от коэффициента мощности нагрузки. В результате изменяется также и момент перехода тока через нуль, определяющий выключение проводящего тиристора и включение встречного. Система управления должна отслеживать изменение угла ф или создавать импульсы управления с длительностью соtH > ф, чтобы обеспечить безразрывность тока нагрузки.
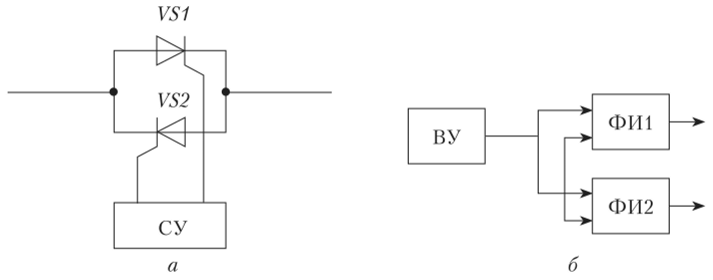
Рис. 5.1. Однофазный тиристорный аппарат с ТКЕ:
а — схема силовой части; б — структурная схема системы управления Слаботочные контакторы и реле можно выполнить и на одном тиристоре (рис. 5.2), когда потери в диодах выпрямителя некритичны.
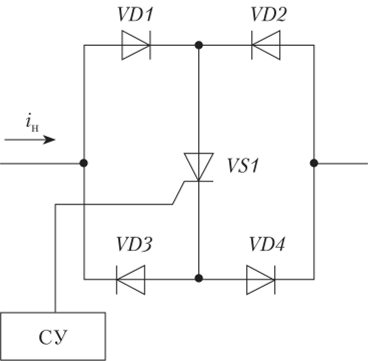
Рис. 5.2. Тиристорный аппарат переменного тока на одном тиристоре.
Вариант схемы трехфазного тиристорного аппарата с ТКЕ, в частности контактора, приведен на рис. 5.3. В такой схеме последовательность импульсов управления должна соответствовать трехфазной системе напряжений, т. е. следовать со сдвигом 120 электрических градусов. Одна из особенностей электронных аппаратов — возможность совмещать функции коммутационного аппарата и регулятора. При задержке поступления очередного импульса на угол управления а становится возможным изменять напряжение на нагрузке. В этом случае аппарат становится также регулятором напряжения или тока (рис. 5.4). Очевидно, что с увеличением угла а действующее значение /" тока нагрузки уменьшается, что позволяет реализовать принцип фазового регулирования.
На рис. 5.5 приведена зависимость тока 1Н (в относительных единицах) при активной нагрузке от угла управления а (ток /" б соответствует углу, а = 0). Следует отметить, что при таком регулировании форма выходного напряжения (тока) становится отличной от синусоиды. Это приводит к существенному росту коэффициента нелинейных искажений тока и соответственно напряжения на нагрузке.
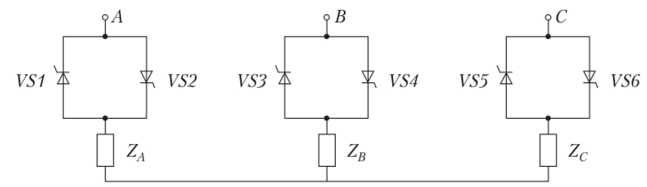
Рис. 5.3. Трехфазный тиристорный аппарат переменного тока.
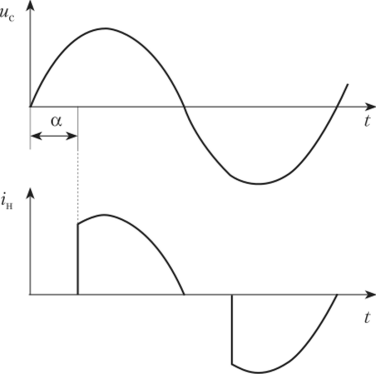
Рис. 5.4. Диаграммы напряжения и тока тиристорного регулятора переменного тока.
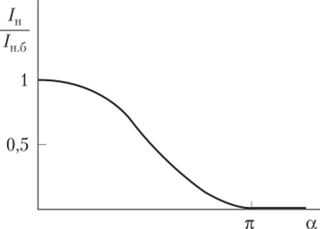
Рис. 5.5. Регулировочная характеристика тиристорного регулятора переменного тока при активной нагрузке.
При активно-индуктивной нагрузке (ср > 0) регулирование с симметричной работой тиристоров становится возможным только при условии, а > ф. В противном случае, при включении тиристора в момент, а < ф, переходный процесс изменения тока в активно-индуктивной нагрузке будет превышать половину периода. В результате встречный тиристор не сможет включиться, так как будет зашунтирован проводящим в этот момент тиристором, или включится в момент, не соответствующий углу управления а предыдущего полупериода. Таким образом, возникнет несимметричный режим, что приведет к дополнительным искажениям тока нагрузки, появлению постоянной составляющей, неравномерной загрузке тиристоров и другим нежелательным последствиям. Поэтому алгоритм формирования импульсов управления регулятора должен учитывать выполнение условия, а > ф во всех режимах, включая пусковой. Угол сдвига ф, напрямую связанный с коэффициентом мощности нагрузки регулятора (соэф), будет влиять на регулировочные характеристики и при условии, что, а > ф.
Рассмотрим более подробно крайний случай, когда нагрузка регулятора имеет чисто индуктивный характер, т. е. при ф = л/2 (соБф = 0). Это характерно для регулятора (компенсатора) избытка реактивной мощности емкостного характера, возможного в некоторых электроустановках. Схема и диаграммы, иллюстрирующие работу компенсатора с индуктивностью 10, приведены на рис. 5.6. Условие, а > ф определяет более узкий диапазон изменения угла управления, а (от л/2 до л). При очередном включении тиристора VS1 через индуктивность L0 начнет протекать ток Этот ток можно представить в виде суммы двух составляющих — свободной /св(0) и установившейся /*(Ф):

Допустим, что потери энергии в ключах равны нулю. Тогда при синусоидальном входном напряжении с амплитудой Uт установившаяся составляющая.

Свободную составляющую можно определить из закона коммутации тока в индуктивных цепях.

Из выражений (5.2) и (5.3) получим.

Так как свободная составляющая из-за отсутствия потерь в схеме не затухает, то iCB(d) = /св(а). В итоге имеем 
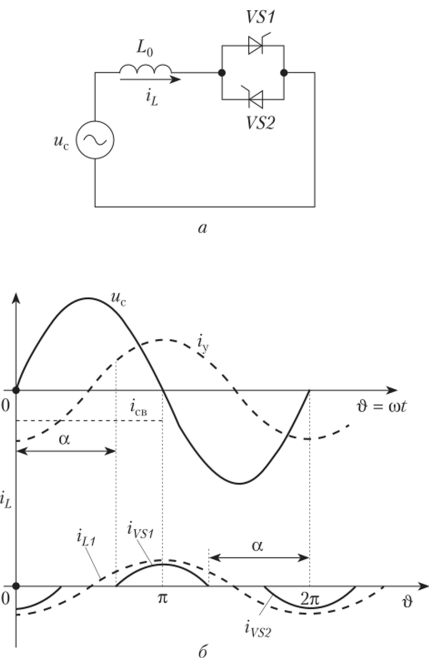
Рис. 5.6. Компенсатор реактивной мощности:
а — силовая схема; б — диаграммы работы В момент Д = (2л — а) (рис. 5.6, б) ток г, становится равным нулю и тиристор VS1 выключается. Возникает пауза в токе. Затем при Д = я + а включается тиристор VS2 и ток в индуктивности начинает протекать в противоположном направлении. Ток в индуктивности (при регулярном следовании импульсов управления) имеет периодическую несинусоидальную форму. Наиболее важна первая гармоника г/(, участвующая в компенсации (баланс реактивных мощностей выполняется для основной гармоники), в то время как высшие гармоники обычно отфильтровываются. Действующее значение первой гармоники тока равно.

где /", = ит/(ыЦ).
Из выражения (5.6) следует, что, варьируя угол а в интервале л/2—п, получим изменение действующего значения тока первой гармоники вдиапазоне от 1т /V2 до нуля. Снижение действующего значения тока первой гармоники IL при увеличении угла, а соответствует увеличению эквивалентного индуктивного сопротивления компенсатора.

где Х0 = со10 — индуктивное сопротивление реактора L0 на частоте напряжения сети.
На основе регулятора реактивной мощности может быть выполнен бестрансформаторный стабилизатор переменного напряжения, позволяющий обеспечить регулирование выходного напряжения относительно входного. Схема стабилизатора приведена на рис. 5.7, а. Стабилизатор содержит индуктивность L между входом и выходом. Параллельно выходу подсоединены конденсатор С и тиристорный компенсатор с индуктивностью L0
Принцип стабилизации поясним с помощью векторной диаграммы. Входное напряжение UBX равно геометрической сумме выходного напряжения Uu и падения напряжения на индуктивности L. Будем считать, что при номинальном входном напряжении t/Bx0 суммарным током всех параллельных ветвей (включая ток нагрузки /") создается падение напряжения Af/0 на индуктивности L (рис. 5.7, б). Увеличение входного напряжения до значения f/Bxl или уменьшение до значения f/Bx2 можно скомпенсировать соответствующим изменением падения напряжения на входной индуктивности L. Изменяя (но модулю и направлению) вектор общего тока параллельной выходу реактивной цепи С и L0 (ILC = IL + /с), можно стабилизировать выходное напряжение при изменении входного. Эта компенсация выполняется регулированием угла управления, а тиристоров VS1 и VS2. В результате регулирования появляется приращение тока А/ параллельной цени С и L0. Модуль и направление вектора тока приращения непосредственно связаны с изменением угла управления тиристоров. Векторы для положительного и отрицательного приращения (показаны пунктиром и обозначены как, А и А/2) перпендикулярны вектору t/BbIX, поскольку ток ILC сдвинут относительно напряжения Un на угол ±п/2. Соответствующие приращения векторов падения напряжения на входной индуктивности, А и А[/2 (показаны пунктиром) параллельны вектору выходного напряжения UH. Пользуясь методом наложения и геометрически суммируя приращения AU[ и А{/2 с исходным номинальным входным напряжением ?/вх0, получим искомые входные напряжения {/вх1 и t/Bx2.
Основное достоинство рассматриваемой схемы — малое искажение формы выходного напряжения благодаря наличию конденсатора С. Однако установленные мощности конденсатора и индуктивности L0 в 2—3 раза выше номинальной мощности нагрузки.
Широкое распространение получили стабилизаторы напряжения с переключением отпаек обмоток трансформатора (или автотрансформатора). Такие стабилизаторы позволяют обеспечить высокую точность стабилизации при малых искажениях входного тока. Эти качества особенно важны в системах электроснабжения с мощными выпрямителями, необходимых, например, для электролиза в металлургической промышленности. В таких системах использование для стабилизации выходного напряжения управляемых выпрямителей приводит к существенным искажениям сетевого тока. Поэтому более целесообразно применить многофазные неуправляемые выпрямители, а стабилизацию осуществлять путем регулировки входного напряжения.
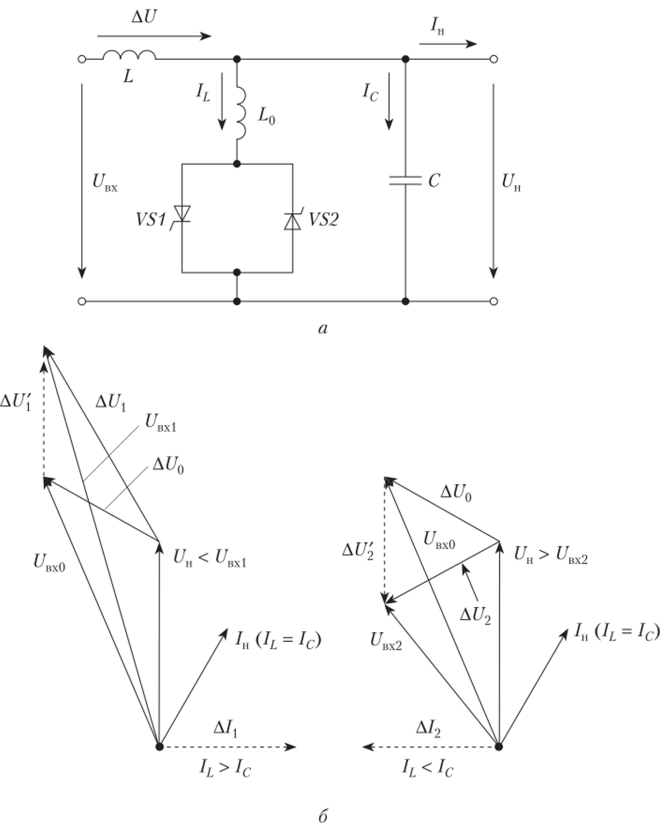
Рис. 5.7. Стабилизатор переменного напряжения:
а — схема силовой части; 6 — векторные диаграммы На рис. 5.8 представлена упрощенная схема стабилизатора, отпайки автотрансформатора которого переключаются тиристорами VS1, VS2 и VS3, VS4, обеспечивая дискретное регулирование. Плавное регулирование (в пределах дискретной регулировки) достигается дополнительным фазовым управлением тиристоров. В положительный полупериод входного напряжения работают тиристоры VS1 или VS2, а в отрицательный — VS3 или VS4. При дискретном регулировании для обеспечения синусоидальности выходного напряжения необходимо, чтобы переключение производилось при нуле тока. При плавном регулировании для естественной коммутации тиристоров переключение должно выполняться на отпайки с более высоким потенциалом. В частности, в положительную полуволну напряжения сначала включается тиристор VS2, а затем VS1. В этом случае при включении тиристора VS1 кратковременно образуется короткозамкнутый контур, в котором развивается ток, направленный встречно току нагрузки, протекающему через тиристор VS2. В результате тиристор VS2 выключается, и ток начинает проводить тиристор VS1. Плавное регулирование действующего значения выходного напряжения производится за счет изменения угла включения тиристора VS1. На рис. 5.8, б представлена диаграмма выходного напряжения стабилизатора при активной нагрузке.
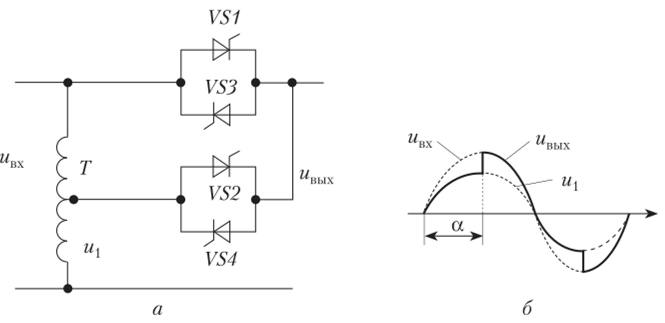
Рис. 5.8. Стабилизатор переменного напряжения с отпайками автотрансформатора:
а — схема силовой части; б — диаграммы напряжений Дискретное регулирование напряжения переключением отпаек в силовых трансформаторах широко используется и в системах электроснабжения, как специального (для электровозов, печных трансформаторов и др.), так и общего назначения. При этом регулирование напряжения обычно осуществляется в линиях свыше 10 кВ в трансформаторах мощностью 10 МВ • А и более. Для обеспечения бездуговой коммутации под нагрузкой используются гибридные аппараты, состоящие из механических переключателей и мощных тиристоров.
В заключение следует отметить, что в стабилизаторах напряжения невысокой мощности могут успешно использоваться транзисторы в сочетании с диодами, позволяющие осуществлять коммутацию в любой момент времени.