Эффективность полноты ПИД-регулятора при управлении многоканальным объектом
На рис. 12.5 и 12.6 показаны переходные процессы при раздельной подаче ступенчатых входных воздействий с разницей во времени, равной половине времени моделирования, т. е. 20 с. Таким образом, показано, что, по меньшей мере, в некоторых случаях использование полной структуры ПИД-регулятора более эффективно, чем применение сокращенной структуры. Рассмотренный пример с упрощенной структурой детально… Читать ещё >
Эффективность полноты ПИД-регулятора при управлении многоканальным объектом (реферат, курсовая, диплом, контрольная)
В серии статей по численной оптимизации регуляторов [35, 37—41], а также в монографиях [36, 60] рассматриваются приемы и методики, позволяющие получить численные параметры регуляторов по известной модели объекта. При этом в случае использования многоканального объекта рекомендуется применение неполного ПИД-регулятора, а именно: интегратор рекомендуется применять только в прямом контуре управления, т. е. в главной диагонали матричной передаточной функции регулятора. В остальных элементах рекомендуется использование ПД-регуляторов.
Такой подход оправдан с позиции следующих соображений:
- 1) наличие интегратора в главной диагонали теоретически достаточно для обеспечения астатического управления;
- 2) указанное упрощение позволяет исключить несколько неизвестных коэффициентов. Например, при управлении объектом размерности 2×2 вместо 12 коэффициентов достаточно отыскать лишь 10; при управлении объектом размерности 3×3 вместо 27 коэффициентов достаточно отыскивать только 21 коэффициент.
В данной главе исследуется целесообразность такого упрощения на примере объекта с близкими параметрами элементов матричной передаточной функции. Такая модель объекта является одним из наиболее проблемных вариантов, особенно при наличии запаздывания.
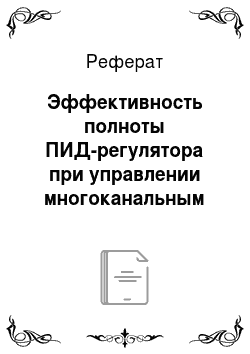
Пример 12.6. Пусть передаточная функция объекта задается произведением двух матриц:
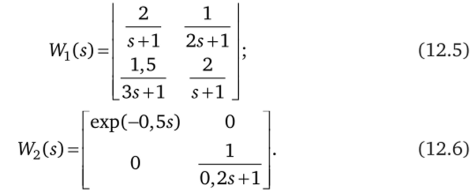
На рис. 12.1 показана структурная схема такого элемента при моделировании его в программе VisSim.
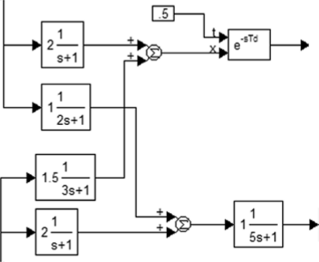
Рис. 12.1. Структура объекта.
Методами численной оптимизации в программе VisSim будем исследовать возможности управления при использовании двух вариантов регуляторов: 1) регулятор с неполной структурой, показанной на рис. 12.2; 2) регулятор с полной структурой, изображенный на рис. 12.3.
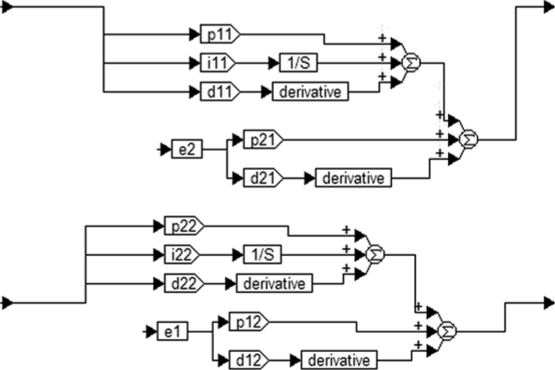
Рис. 12.2. Структура регулятора (ПИД в главных диагоналях и ПИ в неглавных диагоналях).
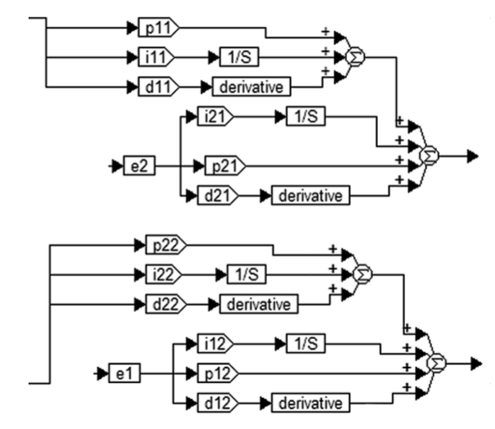
Рис. 12.3. Структура полного ПИД-регулятора.
Рассмотренный пример с упрощенной структурой детально исследован в работе [60]. Результат показан на рис. 12.4, где приведена структура для моделирования всей системы.
![Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60].](/img/s/8/09/1377109_5.png)
Рис. 12.4. Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60].
На рис. 12.5 и 12.6 показаны переходные процессы при раздельной подаче ступенчатых входных воздействий с разницей во времени, равной половине времени моделирования, т. е. 20 с.
![Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60], — выходной сигнал первого канала.](/img/s/8/09/1377109_6.png)
Рис. 12.5. Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60], — выходной сигнал первого канала.
![Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60], — выходной сигнал второго канала.](/img/s/8/09/1377109_7.png)
Рис. 12.6. Наилучший результат, полученный с упрощенной структурой ПИД-регулятора [60], — выходной сигнал второго канала.
Перерегулирование в первом канале составляет от 10 до 35%. Перерегулирование во втором канале составляет около 10% при подаче ступенчатого воздействия на первый вход, т. е. в данном случае речь идет о перекрестном влиянии первого канала на второй.
С другими параметрами регуляторов можно обеспечить меньшее значение перерегулирования в каналах, но при этом не обеспечивается требуемая статическая точность, в частности во втором канале в этом случае статическая ошибка слишком велика и возрастает с течением времени [3].
На рис. 12.7 показаны результаты оптимизации той же системы при использовании полной структуры ПИД-регулятора.

Рис. 12.7. Результаты оптимизации системы при использовании полного ПИД-регулятора.
На рис. 12.8 и 12.9 представлены переходные процессы на выходах объекта, показанного на рис. 12.4—12.6. Как видим на рис. 12.8 и 12.9, вследствие оптимизации обеспечивается высокое быстродействие, но большое перерегулирование: в первом канале оно превышает 150%, во втором канале — около 80%.
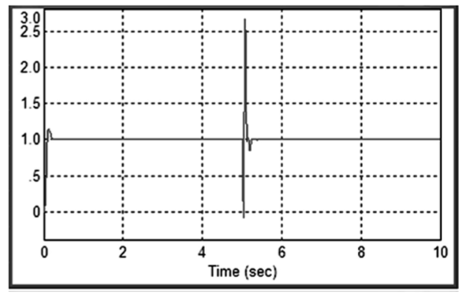
Рис. 12.8. Результаты оптимизации системы при использовании полного ПИД-регулятора — выход первого канала.
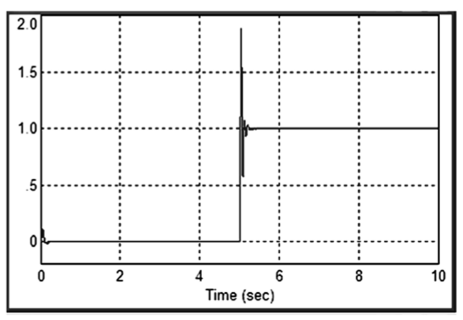
Рис. 12.9. Результаты оптимизации системы при использовании полного ПИД-регулятора — выход первого канала.
Данный результат, показанный на рис. 12.7—12.9, получен без использования детектора правильности движений [3], в отличие от результата, представленного на рис. 12.4—12.6. Поэтому для корректного сравнения двух видов регуляторов следует во втором случае также применить детектор правильности движения, т. е. слагаемое в целевой функции, которое резко возрастает, если произведение какой-либо из ошибки на ее производную положительно. Результаты показаны на рис. 12.10—12.12.
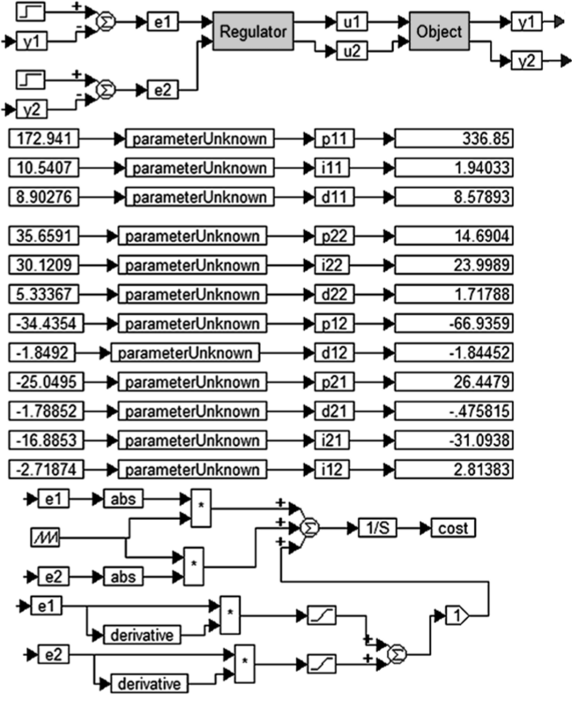
Рис. 12.10. Результаты оптимизации системы при использовании полного ПИД-регулятора при введении детектора правильности движений.
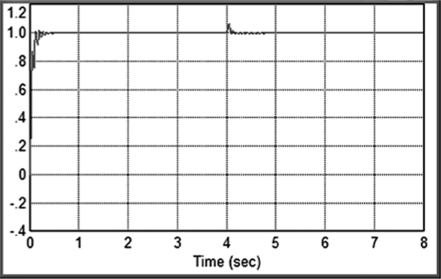
Рис. 12.11. Результаты оптимизации системы при использовании полного ПИД-регулятора — выход первого канала.
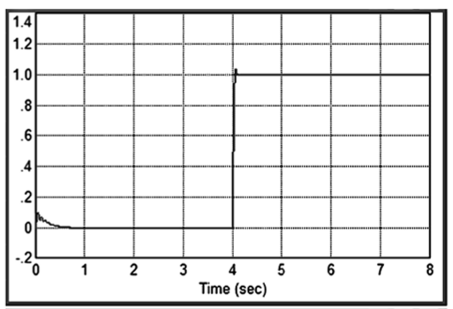
Рис. 12.12. Результаты оптимизации системы при использовании полного ПИД-регулятора — выход второго канала.
Из рис. 12.10—12.12 очевидно, что обеспечено снижение перерегулирования до величины порядка 2%.
Таким образом, показано, что, по меньшей мере, в некоторых случаях использование полной структуры ПИД-регулятора более эффективно, чем применение сокращенной структуры.