Асинхронные машины автоматических устройств
Трансформаторная система связи состоит из сельсинадатчика, сельсина-приемника, линии связи, усилителя У и исполнительного двигателя ИД (рис. 3.111). Исполнительный двигатель соединен с нагрузочным механизмом, который имеет обратную механическую связь с сельсином-приемником. Обмотка возбуждения сельсина-датчика подключена к однофазной сети переменного тока и создает пульсирующее магнитное поле… Читать ещё >
Асинхронные машины автоматических устройств (реферат, курсовая, диплом, контрольная)
К машинам, применяемым в автоматических устройствах, в первую очередь относятся асинхронные исполнительные двигатели, которые должны обеспечивать высокий диапазон изменения частоты вращения при линейных механических и регулировочных характеристиках. Исполнительные двигатели должны иметь высокое быстродействие, большой пусковой момент, малую мощность управления, малый момент трения, а также не иметь самохода при уменьшении напряжения управления до нуля.
Этим противоречивым требованиям в основном удовлетворяют двухфазные асинхронные двигатели с полым ротором и двигатели с короткозамкну той обмоткой ро тора с повышенным активным сопротивлением. Двигатели с полым ротором, рассмотренные в параграфе 3.15, выполняются на мощность до 30 Вт, а двигатели с короткозамкнутым ротором с повышенным сопротивлением — до 500 Вт. Исполнительные асинхронные двигатели могут изготовляться на мощность и в несколько киловатт.
Исполнительные асинхронные двигатели на сотни ватт выполняются с шихтованным ротором, а короткозамкнутая обмотка заливается сплавами алюминия с повышенным сопротивлением или сваривается из латуни или бронзы. Используются также двигатели с массивным ротором, рассмотренные в параграфе 3.15, которые имеют худшие энергетические и массогабаритные показатели, но сравнению с двигателями с шихтованным ротором. Двигатели с массивным ротором применяются в высокоскоростных приводах, в которых двигатели с короткозамкнутой обмоткой из-за недостаточной механической прочности применяться нс могут.
В асинхронных исполнительных двигателях основной проблемой является отвод тепла, которое выделяется в машине при глубоком регулировании частоты вращения. Для лучшего охлаждения исполнительных двигателей применяются вентиляторы-наездники, частота вращения которых не зависит от частоты вращения исполнительного двигателя, используются также охлаждение водой и внутреннее испарительное охлаждение. В исполнительных микродвигателях интенсивный отвод тепла осуществляется также путем увеличения поверхности охлаждения.
Для плавного регулирования частоты вращения асинхронных исполнительных двигателей применяется два способа: частотный (изменение частоты напряжения) и изменением напряжения (изменение скольжения за счет амплитуды и фазы питающего напряжения). Наибольшее распространение получил второй способ, так как преобразователи частоты, несмотря на применение силовых полупроводниковых элементов, остаются громоздкими и дорогими. При регулировании частоты вращения исполнительных двигателей путем изменения напряжения применяют три способа управления: амплитудное, фазное и амплитудно-фазное. При амплитудном регулировании изменяется амплитуда подводимого к двигателю напряжения, при фазном — фаза напряжения, а при амплитудно-фазном изменяются и амплитуда, и фаза напряжения.
При изменении амплитуды или фазы питающего напряжения изменяется форма поля в воздушном зазоре из-за изменения амплитуд прямого и обратного полей. Таким образом, за счет изменения степени эллиптичности поля в воздушном зазоре осуществляется регулирование частоты вращения.
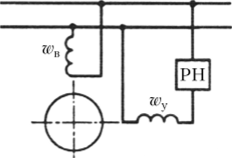
Рис. 3.107. Схема управления двухфазным двигателем.
В системах автоматического управления мощностью до 1 кВт обычно применяются двухфазные двигатели, когда одна обмотка (обмотка возбуждения гив) подключена к сети, а обмотка управления wy питается через регулятор напряжения PH (рис. 3.107). В исполнительных двигателях мощностью больше 1 кВт используются трехфазные двигатели, когда каждая фаза обмотки через регулятор напряжения подключается к сети.
В последнее время в качестве управляющих элементов применяются регуляторы напряжения на тиристорах и транзисторах, находят также применение схемы на магнитных усилителях. Следует отметить, что управляющие элементы имеют большие габариты, так как они рассчитываются на полную или на часть мощности системы. Габариты и стоимость управляющих элементов возрастают в реверсивных системах, когда необходимо изменять направление вращения и регулировать частоту вращения в широких пределах.
Стремление снизить массу всей системы регулирования приводит к попытке объединить исполнительный двигатель и регулятор напряжения или преобразователь частоты в одном агрегате и за счет лучшего использования материалов получить общее снижение массы электромеханической системы.
Удачным совмещением исполнительного асинхронного двигателя и магнитных усилителей являются двигателиусилители (рис. 3.108). В двигателях-усилителях обмотки магнитных усилителей наматываются на спинку магнитопровода статора, а обмотки двигателя 1 и магнитного усилителя 2 укладываются в пазы. Обмотки переменного тока наматываются на спинку статора каждого пакета 3, а обмотки управления охватывают оба пакета. В ярме статора пото;
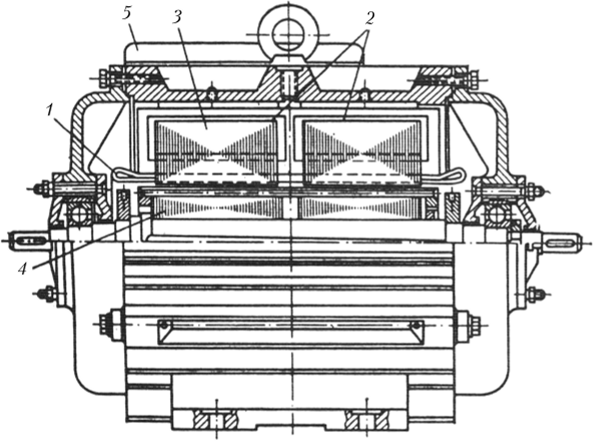
Рис. 3.108. Асинхронный двигатель-усилитель ки магнитного усилителя и двигателя складываются. Сталь ярма статора является магнитопроводом магнитных усилителей и двигателя. Ротор 4 короткозамкнутый.
В коробке выводов 5 двигателя-усилителя помещаются диоды магнитных усилителей. В специальных машинах обычно коробки выводов имеют увеличенные размеры, так как в них располагаются различные элементы систем управления. Благодаря тому, что силовые обмотки магнитных усилителей соединены последовательно с обмоткой статора двигателя, при работе системы напряжение сети перераспределяется между магнитным усилителем и двигателем так, что суммарный магнитный поток практически не изменяется. Когда магнитные усилители не насыщены, их поток максимален, а при насыщении магнитных усилителей магнитный поток максимален в исполнительном двигателе. В промежуточных режимах поток перераспределяется между магнитными усилителями и двигателем. Двигатели-усилители обеспечивают снижение массы по сравнению с раздельной системой в 1,2—1,5 раза и, несмотря па применение регуляторов напряжения па тиристорах, являются наименее металлоемкими системами.
Для управления различными механизмами применяются микроЭВМ — микропроцессоры. Упрощение технологии изготовления и увеличение надежности микропроцессоров приводит к тому, что они встраиваются в электрические машины, чтобы получить простейшие самонастраивающиеся электромеханические системы.
В системах автоматического управления для приводных механизмов часто требуются низкие частоты вращения и большие моменты. Получить низкую частоту вращения, имея частоту сети 50 или 400 Гц, можно путем увеличения числа полюсов двигателя. Однако увеличение числа полюсов ограничивается технологическими причинами, так как нельзя из-за наклепа сделать ширину зубцов меньше примерно 1,2 мм, а диаметр двигателя, как правило, ограничен. Применение механических редукторов усложняет и снижает точность электромеханической системы.
Электрические машины позволяют получить электромагнитную редукцию частоты вращения. В основе электромагнитной редукции лежит использование пространственных гармоник и несимметрии воздушного зазора в двигателях с ротором индукторного типа, с катящимся или волновым ротором.
В редукторных двигателях в качестве основной гармоники используется 5-я или 7-я пространственная гармоника, которая имеет в 5—7 раз меньшие синхронные частоты вращения. При определенных соотношениях чисел зубцов на роторе и статоре и числа пар полюсов высшие пространственные гармоники имеют амплитуду большую, чем 1-я, и двигатель работает на высшей пространственной гармонике как на основной.
Недостатком редукторных двигателей являются низкий КПД и разброс характеристик, зависящий от технологии изготовления двигателя.
В настоящее время созданы электромеханические системы с исполнительными двигателями, обеспечивающие равномерную частоту вращения в один оборот и доли оборота в сутки.
Наибольшие трудности существуют при создании моментных асинхронных двигателей с большими моментами при о)р «0, а также обеспечивающих глубокое регулирование частоты вращения.
В генераторном режиме асинхронные машины в системах автоматического управления широко используются в качестве тахогенераторов — датчиков частоты вращения и датчиков ускорения.
По своей конструкции асинхронные тахогенераторы ничем не отличаются от асинхронных двигателей с полым ротором. К одной из обмоток статора — обмотке возбуждения подводится переменное напряжение U". При вращении ротора со второй обмотки статора wр, сдвинутой на электрический угол 90° по отношению к обмотке возбуждения, снимается напряжение Ur, которое пропорционально частоте вращения (рис. 3.109).
При неподвижном роторе, когда юр = 0, в обмотке w(sf ЭДС не наводится и Uv = 0. При вращении согласно уравнениям (3.132) в обмотке статора гер, расположенной под углом 90°.
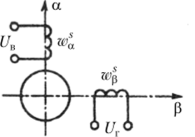
Рис. 3.109. Асинхронный тахогенератор.
к w’a, будет наводиться синусоидальное напряжение, пропорциональное Юр.
Для тахогенсратора важно, чтобы напряжение линейно зависело от Юр, а его фаза и форма нс изменились при изменении частоты вращения. Иными словами, амплитудные и фазовые погрешности в асинхронных тахогенераторах должны быть минимальными. Для уменьшения погрешностей следует делать ротор с повышенным сопротивлением, а нагрузка, подключаемая к напряжению должна быть высокоомной. При этом U,. ~ Ег и ток в выходной обмотке не влияют на характеристики асинхронного тахогенератора.
Одним из важных показателей тахогенератора является крутизна выходной характеристики.

где AU,. — изменение выходного напряжения; Ап — изменение частоты вращения.
Чем больше крутизна выходной характеристики, тем точнее будет работать система автоматического управления. Однако увеличение крутизны выходной характеристики без увеличения габаритов тахогенератора влечет увеличение амплитудной и фазовой погрешностей. Поэтому при проектировании тахогенераторов приходится увязывать крутизну выходной характеристики с погрешностями. У точных асинхронных тахогенераторов k = 1-^3 мВ/(об/мин), а у тахогенераторов следящих систем k = 6-ИО мВ/(об/мин).
При питании обмотки возбуждения zc, постоянным током при постоянной частоте вращения напряжение Ur будет равно нулю, а при наличии ускорения dn/dt ЭДС на обмотке изменяется согласно уравнениям (3.132) пропорционально ускорению. В этом режиме асинхронный тахогенератор является датчиком ускорения.
В системах синхронной связи и для преобразования угла поворота в электрический сигнал применяются сельсины и поворотные (вращающиеся) трансформаторы.
Трехфазные сельсины конструктивно не отличаются от асинхронных машин с фазным ротором. В однофазных сельсинах имеется однофазная обмотка возбуждения и трехфазная обмотка синхронизации. Поворотные трансформаторы — двухфазные асинхронные двигатели с фазной обмоткой на роторе, выведенной на кольца. Так как сельсины и поворотные трансформаторы выполняют функции датчиков и приемников в устройствах автоматического управления, при проектировании их основное внимание должно быть уделено вопросам точности и надежности.
Сельсины применяют в системах синхронной связи двух видов: синхронного поворота (передачи угла) и синхронного вращения (электрического вала).
Системы передачи угла в свою очередь можно разделить на индикаторные системы синхронной связи, в которых момент сопротивления на ведомой оси мал или отсутствует, и на трансформаторные системы синхронной связи, когда на ведомой оси имеется момент сопротивления.
На рис. 3.110 представлена схема индикаторной синхронной связи. Эта схема включает в себя два одинаковых однофазных сельсина и линию связи. Обмотки возбуждения сельсина-датчика wBa и сельсина-приемника wBn присоединены к одной сети, а концы фаз обмоток роторов сельсинов — обмотки синхронизации — через контакторные кольца и линию связи соединены между собой. При повороте ротора сельсина-датчика на угол (хд ротор сельсина-приемника стремится повернуться на такой же угол. При ад * а" возникают токи 1А, 1ц, 1С, создающие момент в сельсине-приемнике и сельсине-датчике.
Уравнительный ток в фазах обмотки синхронизации определяется как.

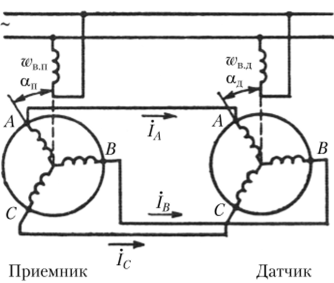
Рис. 3.110. Схема индикаторной синхронной связи где АЕ — ЭДС, определяемая углом поворота сельсина-датчика; z,|, — сопротивление фазы сельсина (для датчика и приемника одинаковые).
В результате взаимодействия уравнительных токов с пульсирующим полем обмоток возбуждения сельсинов возникает синхронизирующий момент, который при изменении угла рассогласования изменяется по синусоидальнему закону. Синхронизирующий момент приложен к сельсину-датчику и сельсину-приемнику.
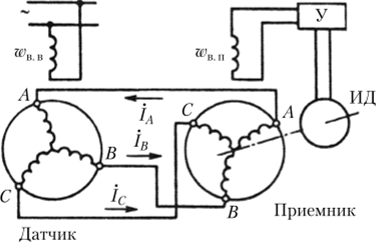
Рис. 3.111. Трансформаторная система связи.
Трансформаторная система связи состоит из сельсинадатчика, сельсина-приемника, линии связи, усилителя У и исполнительного двигателя ИД (рис. 3.111). Исполнительный двигатель соединен с нагрузочным механизмом, который имеет обратную механическую связь с сельсином-приемником. Обмотка возбуждения сельсина-датчика подключена к однофазной сети переменного тока и создает пульсирующее магнитное поле. Пульсирующее магнитное поле наводит в обмотке синхронизации датчика ЭДС, под действием которых в линии связи и обмотке синхронизации приемника постоянно протекают токи. Эти токи создают в сельсине-приемнике пульсирующее магнитное поле, направление которого зависит от взаимного расположения роторов приемника и датчика. Сцепляясь с обмоткой возбуждения приемника, это поле наводит ЭДС — выходное напряжение приемника. Последнее подается на усилитель, а затем на обмотку управления исполнительного двигателя, который отрабатывает заданный датчиком угол и возвращает ротор приемника в положение, при котором выходное напряжение становится равным нулю. Такое положение роторов сельсинов называется согласованным.
В целях повышения качества работы системы синхронной связи часто сельсины выполняются без скользящих контактов (рис. 3.112). Статор 1 бесконтактного сельсина практически не отличается от статора обычной асинхронной машины. В пазах статора располагается соединенная в звезду трехфазная обмотка синхронизации 6. Ротор 2 бесконтактного сельсина двухполюсный и разделен немагнитным промежутком 7 на две части. Однофазная обмотка возбуждения 5 выполняется в виде двух неподвижных кольцевых катушек, расположенных между лобовыми частями обмот;

Рис. 3.112. Бесконтактный сельсин.
ки статора и тороидами 3. Наружные цилиндрические поверхности тороидов связаны внешним магнитопроводом 4. Между внешним магнитопроводом и пакетом статора имеется немагнитный зазор. Путь магнитного потока, создаваемого обмоткой возбуждения, показан на рис. 3.112. Потокосцепление обмотки возбуждения с той или иной фазой обмотки синхронизации зависит от положения ротора, так же как и в контактном сельсине.
Главным требованием к сельсинам, работающим в системах синхронной связи, является точность, которая характеризуется погрешностью.

где 0тах1, 0тах2 — максимальные положительное и отрицательное отклонения ротора приемника от ротора датчика при повороте на один оборот.
В зависимости от значения Д0 сельсины делят на четыре класса точности. Для первого класса Д0 не более ±30 с, а для четвертого — не более ±90 с.
Системы синхронного вращения заменяют механическое соединение двух или нескольких синхронно перемещающихся механизмов. Электрический вал применяется там, где необходимо иметь синхронное вращение механизмов, находящихся на большом удалении друг от друга, а механическое соединение нежелательно или невозможно. Электрический вал состоит из асинхронных машин с фазным ротором, контактные кольца которых соединены между собой (рис. 3.113). При рассогласовании роторов двигателей, так же как и в схеме.
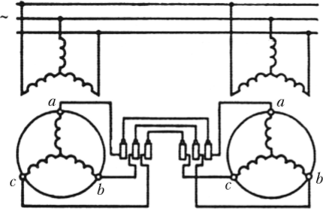
Рис. 3.113. Электрический вал.
с сельсинами, возникают в статоре двигателей уравнительные токи и электромагнитные моменты, возвращающие роторы в согласованное положение.
Поворотные (вращающиеся) трансформаторы применяются в системах автоматического управления для преобразования механического перемещения — угла поворота ротора в выходное напряжение. Конструктивно они представляют собой двухфазные двигатели с двухфазной обмоткой ротора, выведенной на контактные кольца. Особенностью их конструкции является тщательное выполнение магнитной системы и обмоток, в результате чего уменьшается число пространственных гармоник, что обеспечивает высокую точность поворотных трансформаторов.
Последние используются в качестве синусных поворотных трансформаторов, в которых и = Lisina; синусно-косинусных поворотных трансформаторов, в которых иА = Umsin a, ив = Umcos а; линейных поворотных трансформаторов, в которых U = k a.
Поворотные трансформаторы также используются как построители и фазовращатели. Они могут заменять сельсины. Благодаря тому что поворотные трансформаторы — симметричные машины, в них достигается большая точность, чем в сельсинах.
Схема включения синусно-косинусного поворотного трансформатора показана на рис. 3.114. При повороте ротора поворотного трансформатора в обмотке А наводится ЭДС, изменяющаяся по закону синуса, а в обмотке В — по закону косинуса.
Если в поворотном трансформаторе используется одна обмотка на роторе, такой поворотный трансформатор называется синусным поворотным трансформатором.
При определенном соединении обмоток и значении параметров обмоток можно в значительном диапазоне изменения угла получить линейное изменение U = /(а). Такие поворотные трансформаторы называются линейными поворотными трансформаторами.
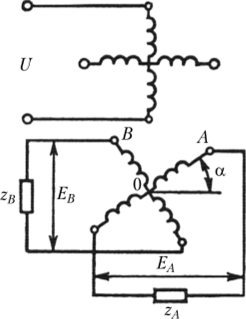
Рис. 3.114. Синуснокосинусный поворотный трансформатор.
По максимальной погрешности (отклонению от синусной или линейной зависимости от угла а и ряду других показателей) поворотные трансформаторы делят на шесть классов точности. В высокоточных поворотных трансформаторах погрешность не превышает нескольких секунд.
Особое место среди асинхронных машин, применяемых в системах автоматического управления, занимают электрические машины гироскопических систем. Они являются основой навигационных систем, с их помощью осуществляется стабилизация различных космических объектов.
Асинхронные гиродвигатели выполняются с короткозамкнутым ротором. Это — обращенные машины. Внешний ротор обеспечивает больший момент инерции, который определяет большую равномерность частоты вращения. Частота вращения в несколько десятков тысяч оборотов в минуту достигается за счет повышенной частоты напряжения питания — до 400−2000 Гц [2, 16].