Движение свободного твердого тела
Переносным движением тела Т будет его поступательное движение вместе с ПСО, связанной с точкой А. Относительным движением тела Т будет его вращение вокруг неподвижной точки А, т. е. сферическое движение. Итак, движение свободного тела представляет собой сумму двух движений: поступательного и сферического. Пусть хА, уА, zA — координаты точки, А тела в НСО, а у/, 0, (р — углы Эйлера, определяющие… Читать ещё >
Движение свободного твердого тела (реферат, курсовая, диплом, контрольная)
Воспользуемся приемом разложения для описания движения, которое совершает свободное тело Т (рис. 7.8).
Будем использовать две системы отсчета: неподвижную — с координатными осями OX, OY, OZ и подвижную, оси координат которой АХ, A Y, AZ параллельны одноименным неподвижным осям, а начало совпадает с точкой А тела Т и движется вместе с ним (рис. 7.8).
Переносным движением тела Т будет его поступательное движение вместе с ПСО, связанной с точкой А. Относительным движением тела Т будет его вращение вокруг неподвижной точки А, т. е. сферическое движение. Итак, движение свободного тела представляет собой сумму двух движений: поступательного и сферического.
За угловую скорость со свободного тела принимают угловую скорость сферической составляющей его движения. Можно показать, что вектор со не зависит от того, какая точка А тела выбрана за начало подвижной системы координат.
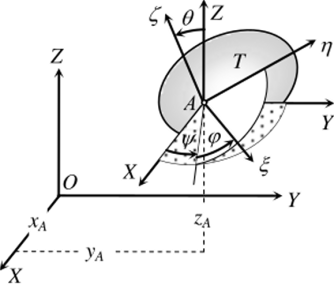
Рис. 7.8.
Пусть хА, уА, zA — координаты точки А тела в НСО, а у/, 0, (р — углы Эйлера, определяющие ориентацию тела относительно подвижной системы координат AXYZ (рис. 7.8). Очевидно, что задание этих шести параметров полностью определяет положение тела Т в пространстве, а их функциональные зависимости от времени.

можно использовать в качестве кинематических уравнений движения свободного твердого тела.
Для определения скоростей и ускорений точек свободного тела воспользуемся правилами сложения скоростей и ускорений (п. 7.2).
Так скорость произвольной точки М тела находим как сумму переносной скорости.

и относительной скорости точки М тела в его сферическом движении вокруг точки А (6.18).
В результате получаем.
Действуя подобным же образом, получаем для ускорения точки М

Здесь переносное ускорение; гхАМ +ых ((охАМ) — относительное ускорение точки М тела в его сферическом движении вокруг точки А (6.19). Кориолисово ускорение отсутствует, потому что переносное движение поступательное и, следовательно, со,. = 0.