Импульсное регулирование напряжения
Из выражений (2.75) и (2.76) следует, что электромеханическая и механическая характеристики электропривода по системе ТП — Д представляют собой прямые линии, наклон которых определяется сопротивлением якорной цепи Ляц. Сопротивление преобразователя из-за наличия трансформатора (токоограничивающего реактора) и сопротивления коммутации, как правило, выше сопротивления якоря Лд, поэтому статическая… Читать ещё >
Импульсное регулирование напряжения (реферат, курсовая, диплом, контрольная)
Систему импульсный регулятор напряжения — двигатель (рис. 2.53) применяют при неРис. 2.53. Система импульсный регулятор напряжения — двигатель:
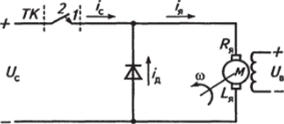
ТК—тиристорный коммутатор изменном напряжении сети постоянного тока. Уравнение электромеханической характеристики.

Поскольку среднее значение тока равно статическому /ср = /с, то и среднее значение момента также будет равно статическому моменту Мс р = Л/с:

Электромеханические и механические характеристики будут параллельны друг другу. Уравнения (2.70) и (2.71) справедливы, если по цепи якоря протекает непрерывный ток. Если же во время открытого ТК (/2) ток успевает снизиться до нуля за время t'2, меньшее чем /2, то в кривой тока содержится пауза и по цепи якоря протекает прерывистый ток (рис. 2.54).
В этом случае движение привода во время паузы связано с большим расходом запаса кинетической энергии, чем в режиме непрерывного тока.
Существует граничный режим, называемый режимом начальнонепрерывного тока, приведенный на рисунке 2.55, когда ток во время /2 уменьшается до нуля в конце паузы. Электромеханические (механические) характеристики при импульсном регулировании скорости по системе источник регулируемого напряжения —.
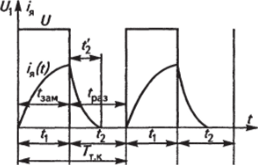
Рис. 2.54. Режим прерывистого тока:
Т1Х — период коммутации тиристорного коммутатора, с; fi—*щ* — время замкнутого состояния тиристорного коммутатора, с; h—t^ — время разомкнутого состояния тиристорного коммутатора, с; t — время снижения тока якоря до нуля в режиме прерывистого тока.
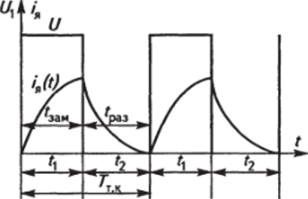
Рис. 2.55. Режим начально-непрерывного тока:
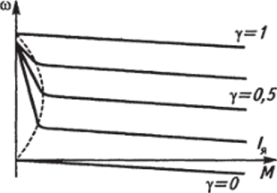
Рис. 2.56. Характеристики при импульсном регулировании скорости по системе источник регулируемого напряжения — двигатель:
у—скважность при широтно-импульсном регулировании.
7*тк— период коммутации тиристорного коммутатора, с; — время замкнутого состояния тиристорного коммутатора, с; /2—Гр*, — время разомкнутого состояния тиристорного коммутатора, с двигатель приведены на рисунке 2.56. Пунктиром показана граница, левее которой находится зона прерывистых токов.
Диапазон регулирования в незамкнутой системе управления составляет D — 20 (при относительном сопротивлении цепи якоря о о Дя =0,05) и достигает D = 50 (при Дя =0,02). В замкнутых системах теоретически достижимый диапазон регулирования при однополярных импульсах составляет 50, при биполярных импульсах возрастает до 200.
Ослабление магнитного потока двигателя. Направление регулирования угловой скорости этим способом (см. рис. 2.2) — вверх относительно основной, то есть выше скорости, находящейся на естественной механической характеристике. Максимальная скорость сотах —• паспортная величина, определяется механической прочностью обмотки якоря, для современных двигателей составляет (З…8)с0н. Минимальная скорость (0,™ — это скорость сос е на ЕМХ при статическом моменте Л/с и Ф = Фн. При регулировании магнитного потока целесообразно соблюдать условие полного использования двигателя по нагреву, чтобы ток /я = /", и при этом условии определять Мс для заданного диапазона регулирования.
Диапазон регулирования в этом случае составит:

где (Он.с =1-Дя, сои =(1-Ля)/Ф при / = /н.
Рис. 2.57. Характер изменения момента и мощности при регулировании скорости:
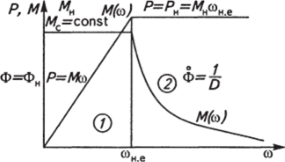
1 — регулирование при постоянном моменте; 2—регулирование при постоянной мощности Магнитный поток при /с = /н равен ф = 1 / D. Статический момент Мс прямо пропорционален Ф и равен Мс = ф /н = /н/ D, где о о.
/н = 1, поэтому с увеличением D будет уменьшаться Л/с = 1/7) (рис. 2.57, кривая 2).
Поскольку при /с = /н произведение /)шн.е =®тах. а статический перепад на ИМХ Дюи=Дюн.с, А то есть если статический перепад на искусственной механической характеристике прямо пропорционален диапазону регулирования, то стабильность с ослаблением магнитного потока ухудшается.
Направление регулирования угловой скорости электропривода — вверх относительно основной скорости. Плавность регулирования высокая, так как регулирование происходит в слаботочных цепях.
Коэффициент полезного действия при этом способе регулирования.

о При номинальном токе нагрузки 1= 1н, % = 1 — Ля, то есть соответствует номинальному значению КПД на естественной механической характеристике.
В регулируемом электроприводе широко применяют электроприводы постоянного тока по системе управляемый выпрямитель-двигатель постоянного тока независимого возбуждения УВ—Д. В качестве полупроводниковых элементов управляемого выпрямителя в зависимости от мощности используют тиристоры или транзисторы.
Система тиристорный преобразователь — двигатель. Систему тиристорный преобразователь — двигатель (ТП — Д) широко применяют благодаря ряду достоинств тиристорного преобразователя (ТП): высокому КПД (потери энергии в тиристорах при протекании номинального тока составляют 1…2% номинальной мощности привода); незначительной инерционности (10…20мс), обусловленной фильтрами управления и неуправляемостью тиристоров; использованию быстродействующей защиты и блочно-модульному исполнению тиристорных преобразователей.
Выбор различных типовых схем и способов управления вентильным электроприводом связан с областью применения электропривода. Здесь в первую очередь необходимо учесть следующие факторы: мощность двигателя, диапазон регулирования скорости, частоту процессов реверса, быстродействие, перерегулирование, сложность и надежность электропривода, капитальные затраты и эксплуатационные расходы.
Схема выпрямления ТП во многом зависит от его мощности. Полупроводниковые преобразователи однофазного тока обычно выполняют по схеме со средней точкой и мостовой схеме. Основная область применения этих схем — установки малой мощности.
При увеличении мощности управляемых выпрямительных установок (свыше нескольких киловатт) используют схемы, питающиеся от трехфазной сети переменного тока и обеспечивающие режим трехфазного (т = 3) или шестифазного (т = 6) выпрямления.
Трехфазные нулевые схемы применяют в установках до.
30. .50 кВт при невысоком напряжении (115 и 230 В), шестифазную схему с уравнительным реактором и трехфазную мостовую схему — в установках средней и большой мощности.
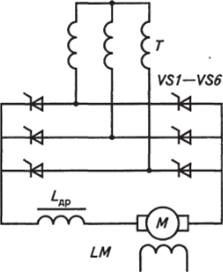
Наиболее совершенна с точки зрения использования трансформатора и вентилей — трехфазная мостовая схема (рис. 2.58).
Современные серии электроприводов средней мощностью.
5. .50 кВт обычно выполняют по бестрансформаторной схеме (рис. 2.59) с включением со стороны переменного тока вентильного преобразователя анодных реакторов, которые обычно выполняют воздушными. При отсутствии дросселя в цепи якоря реакторы должны ограничивать скорость нарастания аварийного тока при коротком Рис. 2.58. Трансформаторная трехфазная мостовая схема:
Т— силовой трансформатор; VS1— К5'б—тиристоры; — дроссель с магнитопроводом Рис. 2.S9. Ьестрансформаторная трехфазная мостовая схема:
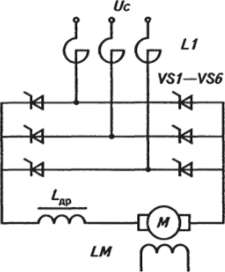
Л/—реактор; V5I—VS6—тиристоры; дроссель с машшопровояом замыкании в цепи якоря двигателя. При больших мощностях нагрузки применяют комбинированные (составные) схемы, представляющие собой последовательное или параллельное соединение нескольких простых схем выпрямления.
При выборе реверсивного вентильного электропривода следует иметь в виду, что на быстродействие электропривода в целом оказывают влияние инерционности всех его элементов. Для приводов, где требуется максимальное быстродействие, изменение направления тока в цепи якоря двигателя реализуется с помощью двух вентильных групп. Двухкомплектные преобразователи выполняют по встречно-параллельной и по перекрестной схемам. В реверсивных тиристорных электроприводах наибольшее распространение получила встречно-параллельная схема соединения вентильных групп (рис. 2.60).
Существует два способа управления реверсивными преобразователями: совместный (см. рис. 2.60) и раздельный (рис. 2.61).
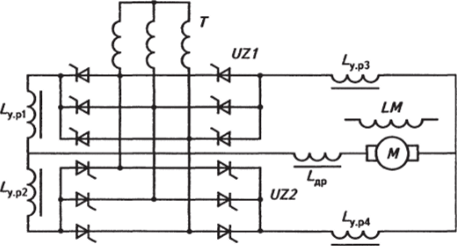
Рис. 2.60. Двухкомплексная встречно-параллельная схема с совместным управлением:
Т— силовой трансформатор; UZ1, UZ2— вентильные группы; Ly^—Ly^ — уравнительные реакторы; Lgp — дроссель с магнитопроводом.
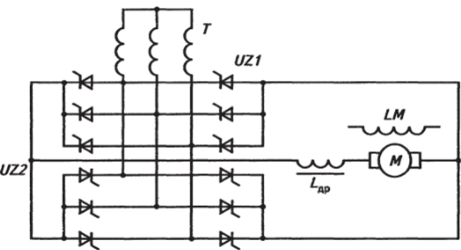
Рис. 2.61. Двухкомплексная встречно-параллельная схема с раздельным управлением:
Г—силовой трансформатор; UZI, UZ2— вентильные группы; L^,—дроссель с магнитолроиодом Большинство реверсивных преобразователей, выпускаемых промышленностью, выполняют с раздельным способом управления, обеспечивая повышенные технико-экономические показатели. В реверсивных преобразователях с раздельным управлением, где требуется повышенное быстродействие, применяют два комплекта фазосдвигающих устройств. В этом случае максимальная бестоковая пауза для трехфазных мостовых схем составляет 3,33 мс. В преобразователях, не требующих повышенного быстродействия, применяют один комплект фазосдвигающего устройства на реверсивный преобразователь. В этом случае может возникнуть дополнительная бестоковая пауза до 8 мс.
Входная координата тиристорного преобразователя (ТП) — это напряжение управления ((/упр), выходная координата — выпрямленная ЭДС (Ed), определяемая как среднее значение на интервале проводимости. Среднее значение выпрямленного напряжения после интегрирования мгновенных значений напряжений катодной и анодных групп и напряжения на нагрузке определяется уравнением вида.

где т — число каналов системы импульсно-фазового управления (СИФУ); т = 3 — для трехфазной однополупериодной схемы; т =6 — для техфазной мостовой схемы; Um — амплитудное значение фазного напряжения, В; 0^, — угол регулирования; укон — угол коммутации тиристоров.

где UK, — относительное напряжение короткого замыкания силового трансформатора, %; /rf, — соответственно средний и средний номинальный выпрямленный ток, А.
Управляющие свойства тиристорного преобразователя зависят от характеристики управления Ed=f (Uynp). Внутренняя координата ТП — угол регулирования а^р связан с характеристикой управления СИФУ OpCr =f2(UYnp). Поскольку для всех ТП характеристики управления вентильных групп одинаковы, то вид результирующей характеристики ТП будет зависеть от характеристики управления СИФУ, которая связана с видом опорного напряжения.
Из уравнения электрического равновесия системы ТП — Д получим электромеханическую характеристику электропривода.

где Д, ц — активное сопротивление силовой цепи якоря, Ом; Ed0 — выпрямленная ЭДСТП при арег = 0. В; Edo Sin~~;
Заменив ток двигателя через его момент, найдем уравнение механической характеристики электропривода.

Из выражений (2.75) и (2.76) следует, что электромеханическая и механическая характеристики электропривода по системе ТП — Д представляют собой прямые линии, наклон которых определяется сопротивлением якорной цепи Ляц. Сопротивление преобразователя из-за наличия трансформатора (токоограничивающего реактора) и сопротивления коммутации, как правило, выше сопротивления якоря Лд, поэтому статическая жесткость механической характеристики примерно едва раза меньше естественных. Указанные прямые при применении угла регулирования отсекают от оси ординат отрезки, соответствующие скорости идеального холостого хода (первый член уравнений 2.75 и 2.76) и параллельны друг другу.
Приведенные на рисунке 2.62 характеристики соответствуют режиму непрерывного тока. Кроме режима непрерывных токов различают режим прерывистых токов (рис. 2.63), при котором ток в нагрузке прерывается. Время наступления режима прерывистых токов зависит от угла управления арег, значения и характера нагрузки (катодной индуктивности).
Причина указанных режимов работы преобразователя в системе ТП — Д заключена в количестве запасенной электро;
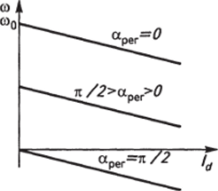
Рис. 2.62. Электромеханические характеристики системы ТП — Д в режиме непрерывного тока:
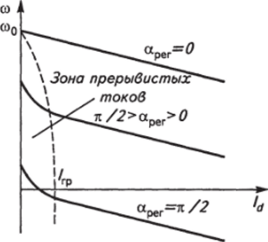
Рис. 2.63. Электромеханические характеристики системы ТП —Д в режиме прерывистого тока:
Орет — угол регулирования; /ф — граничный ток Оре, — угол регулирования магнитной энергии в индуктивностях силовой цепи, которая зависит от выпрямленного тока (нагрузки).
Ширина зоны прерывистых токов, то есть значение граничного тока /ф, зависит от угла регулирования ОреГ и параметров схемы системы ТП — Д:

где —частота сети, Гц; — индуктивность силовой цепи якоря, Гн.
Уравнения электромеханической (2.75) и механической (2.76) характеристик действительны при /^>/ф, то есть вне зоны граничного тока.
Диапазон регулирования в разомкнутой системе ТП—Д ниже, чем при регулировании ДПТ НВ от источника бесконечной мощности из-за сопротивления преобразователя.
Введение
обратных связей по скорости и току позволяет значительно увеличить диапазон регулирования скорости до 10 000. Регулирование возможно не только вниз, но и вверх от основной скорости, когда для регулирования магнитного потока также применяют управляемый преобразователь.
Коэффициент полезного действия системы ТП — Д зависит от нагрузки на валу двигателя и значения минимальной скорости регулирования. Например, зависимость КПД от скорости при номинальной нагрузке приведена на рисунке 2.64.
Коэффициент мощности системы ТП — Д также зависит от минимальной угловой скорости и нагрузки. Зависимость коэффици;
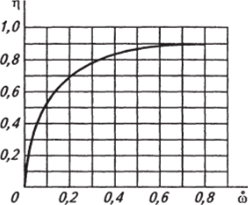
Рис. 2.64. Коэффициент полезного действия системы ТП — Д.
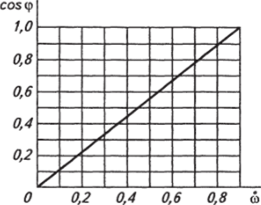
Рис. 2.65. Коэффициент мощности системы ТП — Д.
ента мощности при номинальной нагрузке в зависимости от скорости приведена на рисунке 2.65. Из уравнения баланса мощностей следует, что cos (р = 0,955cos 0^,. Коэффициент мощности убывает с уменьшением выпрямленного напряжения, поэтому для его увеличения приходится применять компенсацию реактивной мощности, например с помощью конденсаторных батарей, либо использовать более сложные схемы.
Пуск системы осуществляют при угле регулирования а,*.,. ~ л/2 с последующим уменьшением его по мере разгона привода.