Основы автоматического управления и регулирования
Рассмотренная система ручного регулирования обладает существенными недостатками: малая точность регулирования и нежелательное наличие оператора. Кроме того, действует ряд возмущающих воздействий: меняющийся момент на валу двигателя Мс, изменение температуры среды, износ щеток электрических машин и т. д., отсюда неточность системы регулирования. Поддержание показателей на заданном уровне или… Читать ещё >
Основы автоматического управления и регулирования (реферат, курсовая, диплом, контрольная)
Основные понятия и определения теории автоматического регулирования. Классификация систем
Технический процесс характеризуется совокупностью данных, величин, показателей. Совокупность операций для пуска, остановки процесса, поддержания постоянства показателей процесса или изменения их по заданному закону называется управлением.
Поддержание показателей на заданном уровне или изменение их по заданному закону называется регулированием, т. е. регулирование — это часть управления. И если эти процессы управления осуществляются без участия человека (оператора), то они называются автоматическими.
Устройство, осуществляющее технологический процесс, показателями которого нужно управлять или регулировать, называется объектом управления, или управляемым объектом. Объектами управления могут быть буровой насос, буровой станок, привод бурового станка и т. д. или отдельные их узлы, выполняющие те или иные операции технологического процесса, например лебедка бурового станка.
Техническое устройство, осуществляющее управление в соответствии с программой (алгоритмом), называется автоматическим управляющим устройством (автоматическим регулятором).
Совокупность объекта управления и управляющего устройства называется системой автоматического управления.
Для восприятия работы буровых автоматических систем основным является рассмотрение операций автоматического регулирования, т. е. тех операций, которые относятся к поддержанию или изменению показателей технологического процесса бурения. В связи с этим буровые автоматические системы называются установившимися в литературе и практике терминами — буровые автоматические регуляторы (БАР), автоматический стабилизатор крутящего момента на вращателе бурового станка, стабилизатор осевой нагрузки и т. и.
Всякий процесс регулирования может вестись без контроля результата — регулирование по разомкнутому циклу или с контролем результата — регулирование по замкнутому циклу.
Примером регулирования по разомкнутому циклу без контроля результата может служить стабилизация подачи промывочной жидкости Q при работе поршневого насоса на полную производительность при включении соответствующей скорости коробки перемены передач (нерегулируемый привод и нет сброса промывочной жидкости). Здесь при значительных (нс аварийных) изменениях характеристики гидравлического тракта (по причине зашламования забойной части, вывалов кусочков породы со стенок скважины и т. п.) расход промывочной жидкости остается неизменным.
Регулирование по разомкнутому циклу применяется значительно реже, чем регулирование по замкнутому циклу, в силу нестабильности характеристик элементов, подверженных различного рода возмущениям. В приведенном примере это может быть изменение коэффициента заполнения цилиндров насоса по причине изменения параметров промывочной жидкости или всасывающего тракта.
Пример замкнутой системы ручного регулирования угловой скорости вращения вала со электрического двигателя приведен на рис. 1.1.
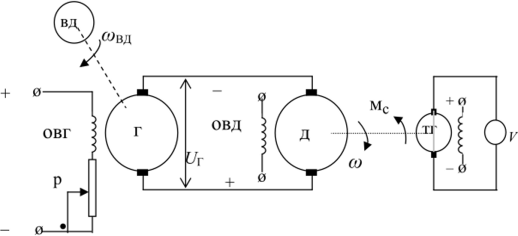
Рис. 1.1. Электрическая схема ручного регулирования угловой скорости вращения вала двигателя: Г — генератор; ОВГ — обмотка возбуждения генератора; ВД — вспомогательный двигатель; Д — двигатель;
ОВД — обмотка возбуждения двигателя; ТГ — тахогенератор;
V — вольтметр; Р — реостат
Угловая скорость вращения вала со электрического двигателя Д является функцией напряжения на клеммах генератора UT, которое при постоянной частоте оборотов якоря (якорь вращается вспомогательным двигателем ВД, (увд = const) определяется током в обмотке возбуждения ОВГ генератора Г. Для регулирования или поддержания постоянной угловой скорости вращения вала со электрического двигателя Д оператор следит за показаниями вольтметра V, проградуированного в размерностях частоты оборотов, и, меняя вручную с помощью реостата Р ток /овг в обмотке возбуждения генератора Г, добивается требуемого значения частоты оборотов вала электрического двигателя Д.
Рассмотренная система ручного регулирования обладает существенными недостатками: малая точность регулирования и нежелательное наличие оператора. Кроме того, действует ряд возмущающих воздействий: меняющийся момент на валу двигателя Мс, изменение температуры среды, износ щеток электрических машин и т. д., отсюда неточность системы регулирования.