Автоматизация управления ЭП в функции тока
На рисунке 1.51 приведена принципиальная электрическая схема автоматического управления резисторным пуском трехфазного АД с фазным ротором в функции тока. После включения автоматического выключателя QF пуск двигателя осуществляют нажатием кнопки SB1. Включается линейный контактор КМ1 и замыкающим контактом КМ1:1 становится на самопитание. Главными замыкающими контактами КМ1 статорная обмотка АД… Читать ещё >
Автоматизация управления ЭП в функции тока (реферат, курсовая, диплом, контрольная)
Она основана на использовании электромагнитных реле минимального или максимального тока, которые коммутируют цепи катушек ускорительных контакторов в моменты увеличения или уменьшения тока двигателя до заданного значения. Указанный принцип автоматизации широко применяют в устройствах максимальной и минимальной токовой защиты ЭП и при управлении ЭП в пусковых и тормозных режимах.
На рисунке 1.51 приведена принципиальная электрическая схема автоматического управления резисторным пуском трехфазного АД с фазным ротором в функции тока. После включения автоматического выключателя QF пуск двигателя осуществляют нажатием кнопки SB1. Включается линейный контактор КМ1 и замыкающим контактом КМ1:1 становится на самопитание. Главными замыкающими контактами КМ1 статорная обмотка АД подключается к сети. Замыкающим контактом КМ 1:2 включается промежуточное (блокировочное) реле напряжения KV, которое необходимо для создания на следующем узле схемы управления некоторой задержки времени в подаче питания, достаточной для размыкания контактов КЛ1 и КА2 токовых реле под действием броска пускового тока двигателя. При разгоне будет происходить снижение тока двигателя, и при определенном его значении первым отпустит якорь токовое реле КА1. Замкнувшимся контактом КЛ1 оно включит контактор ускорения КМ2, который контактом КМ2:1 становится на самопитание, а контактами КМ2:2 и КМ2:3 шунтирует первую ступень пусковых резисторов. Пусковой ток возрастает, а затем по мере дальнейшего разгона двигателя уменьшится до значения, достаточного для отпускания якоря токового реле КЛ2 и срабатывания последнего контактора ускорения КМЗ, который контактом КМ3:1 становится на самопитание, а контактами КМ3:2 и КМ3:3 накоротко замыкает обмотку ротора АД. На этом процесс пуска завершается, и двигатель выходит на естественную механическую характеристику. Отключение двигателя и возврат схемы в исходное состояние осуществляют кнопкой SB2 «Стоп». Защиту от коротких замыканий предусматривают автоматическим выключателем QF, от перегрузки — тепловым реле FP. Цепи управления защищены от коротких замыканий плавкими предохранителями FU1 и FU2.
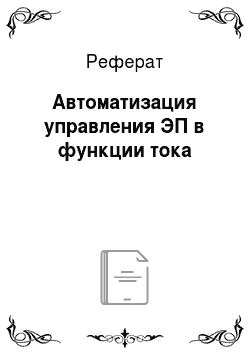
Схема типового узла резисторного пуска ДПТ в функции тока приведена на рисунке 1.52 применительно к ДПТ независимого возбуждения, пускаемого в одну ступень. Для контроля тока служит токовое реле КА, катушка которого включена в.
Рис. 1.52. Схема автоматического управления пуском ДПТ с НВ в функции тока
цепь якоря двигателя. В схеме также предусмотрено промежуточное (блокировочное) реле напряжения KV продолжительность срабатывания которого должна превышать продолжительность срабатывания токового реле КА.
Пуск ДПТ осуществляют нажатием кнопки SB1 «Пуск». Включение линейного контактора КМ1 и бросок пускового тока двигателя, сопровождающийся срабатыванием токового реле КА, вызовут более раннее размыкание контакта КА токового реле по отношению к замыканию контакта KV промежуточного реле. По мере разгона ДПТ ток якоря снижается до значения, достаточного для отпускания токового реле и замыкания его контакта КА. Тогда срабатывает контактор ускорения КМ2, который одним замыкающим контактом КМ2:1 шунтирует пусковой резистор R, другим КМ2:2 становится на самопитание. Двигатель выходит на естественную механическую характеристику и заканчивает разбег. Для отключения двигателя и возврата схемы в исходное состояние нажимают кнопку SB2 «Стоп».
Преимущество автоматизации управления пуском ЭП по току состоит в том, что пуск происходит при заданных значениях пускового тока двигателя независимо от колебания напряжения питающей сети. Вместе с тем, этому способу присущ существенный недостаток, заключающийся в том, что во время пуска при значительном непредусмотренном увеличении нагрузки на валу двигателя его ток не сможет снизиться до значения, достаточного для отпускания токового реле и срабатывания контактора ускорения. Поэтому пусковой резистор (реостат) окажется невыключенным, что может привести к его перегоранию, так как он не рассчитан на длительную нагрузку.
Автоматизация управления ЭП в функции времени. Такая автоматизация получила наибольшее распространение. Преимущества схем автоматического управления ЭП, работающих в функции времени, — исключение возможности работы двигателя с неполной частотой вращения. Причем опасность, связанная с возможным резким возрастанием нагрузки, устраняется применением максимальной токовой защиты, отключающей двигатель от сети при чрезмерных перегрузках. Простота схемной реализации, надежность в работе и возможность применения однотипных реле времени для ЭП постоянного и переменного тока независимо от их мощности привели к широкому использованию принципа автоматического управления в функции времени во многих схемах типовых ЭП.
В качестве примера на рисунке 1.53 приведена принципиальная электрическая схема автоматического управления пуском АД с фазным ротором в функции времени. В этой схеме в процессе пуска ускорительными контакторами КМ2…КМ4 последовательно шунтируются три ступени Rl, R2 и R3 трехфазного пускового резистора. Шунтирование ступеней пускового резистора происходит через определенные промежутки времени сигналами от контактов КТ1…КТЗ механических реле времени, пристроенных к линейному контактору КМ1 и к контакторам ускорения КМ2 и КМЗ. Для пуска ЭП нажимают кнопку SB1, для отключения — кнопку SB2.
Автоматическое управление в функции времени применяют в рабочих режимах, а также при торможении ЭП.
На рисунке 1.54 приведена схема управления прямым пуском и динамическим торможением АД с короткозамкнутым ротором. Пуск двигателя осуществляют нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий обмотку статора АД к напряжению сети. Одновременно с этим замыкание контакта КМ:3 вызовет срабатывание электромагнитного реле времени КТ и замыкание его контакта в цепи тормозного контактора КМ1. Однако последний не срабатывает, так как перед этим в его цепи разомкнулся размыкающий контакт КМ:2.
Для остановки АД нажимают кнопку SB2. Контактор КМ отключается и отключает главными контактами двигатель от сети. Одновременно замыкается вспомогательный контакт КМ:2, вызывающий срабатывание тормозного контактора КМ1, и размыкает;

Рис. 1.53. Схема автоматического управления пуском АД с фазным ротором в функции времени.

Рис. 1.54. Схема автоматического управления пуском и динамическим торможением асинхронным ЭП с короткозамкнутым двигателем.
ся КМ:3, обесточивающий обмотку реле времени для осуществления необходимой выдержки времени при динамическом торможении. Происходит динамическое торможение АД, так как в цепь обмотки статора подано через токоограничивающий резистор Rr постоянное напряжение от выпрямителя UZ. Через заданный интервал времени, соответствующий продолжительности торможения АД, реле времени размыкает контакт КТ в цепи катушки тормозного контактора КМ1. Он отключается, и схема возвращается в исходное состояние.
Интенсивность динамического торможения устанавливается токоограничивающим резистором R, которым регулируется необходимый постоянный ток в обмотке статора АД. Одновременное включение контакторов КМ и КМ1 исключается за счет блокировки цепей питания их катушек размыкающими контактами КМ1:1 и КМ:2.
На рисунке 1.55 приведена типовая схема автоматического управления СД, используемая в серийной станции управления ПН7401 для асинхронного пуска и остановки СД мощностью от 50 до 400 кВт с напряжением обмотки статора 220, 380 или 500 В. Схема содержит: контакторы ускорения КМ1, линейный КМ2, возбуждения КМЗ, форсировки КМ4; реле максимально-токовое пусковое КА, минимального напряжения KV, времени КТ1 и КТ2, резисторы пусковые R1, возбуждения R2 и разрядный R3; кнопки SB 1 «Пуск» и SB2 «Стоп»; автоматические выключатели QF и SF, трансформатор тока ТА; выпрямитель UZ; резисторы балластные цепей управления R4…R7, сигнальные лампы HLJ…HL3.
Пуск СД осуществляют нажатием кнопки SB1. Включается контактор КМ1, и СД подключается к сети через токоограничивающие пусковые резисторы R1. Вследствие броска пускового тока сработает максимально-токовое пусковое реле КА, которое вызовет включение реле времени КТ1 и КТ2, подготовляющих ко включению цепь катушки линейного контактора КМ2. Происходит разбег СД с введением в цепь его обмотки возбуждения разрядного резистора R3, так как контактор КМЗ отключен контактами контактора КМ2 и реле времени КТ2.
При снижении тока обмотки статора СД ниже уставки максимально-токового пускового реле КА происходит его отпускание, реле времени КТ1 теряет питание и с выдержкой времени включает линейный контактор КМ2 и подключает СД непосредственно на полное напряжение сети. Одновременно с этим из-за размыкания контакта КТ1 потеряет питание второе реле времени КТ2, и с выдержкой времени включается контактор возбуждения КМЗ. Контактор КМЗ зашунтирует разрядный резистор R3 в цепи обмотки возбуждения СД, что приведет к его возбуждению и втяги;

Рис. 1.55. Схема автоматического управления асинхронным пуском синхронного двигателя ванию в синхронизм. Одновременно с этим произойдет отключение контактором КМЗ контактора ускорения КМ! и максимальнотокового пускового реле КА.
В случае значительного снижения напряжения сети в режиме пуска СД с включенным линейным контактором КМ2 предусмотрена форсировка тока возбуждения контактором КМ4 при замыкании размыкающего контакта KV реле минимального напряжения. Защита от работы СД в асинхронном режиме, сопровождающемся значительными токами, осуществляется автоматическим включателем QF с комбинированным расцепителем (электромагнитным и тепловым).
Если сеть и СД допускают прямой пуск, то из схемы исключают токоограничивающие пусковые резисторы RI и контактор КМ1. При незначительных моментах нагрузки СД (Л/с < 0,4Мн) может быть реализован пуск СД с глухо подключенным возбудителем. Для этого из схемы исключают узлы, обведенные штрихпунктирной линией.
Полные типовые схемы автоматического управления ЭП. Как правило, этими схемами дополнительно предусматривают контроль и защиту установки, которую ЭП приводит в действие, а также возможность дистанционного управления ЭП. Как отмечалось ранее, наиболее полно автоматизированы ЭП, выполненные в виде замкнутых систем автоматического регулирования, например частоты вращения ЭП. В этом случае удается наиболее полно и качественно сформировать режимы управления не только самим ЭП, но и всей технологической установкой, доведя ее управление до уровня полностью автоматической системы. Силовую (энергетическую) часть современных замкнутых систем управления ЭП выполняют, как правило, на основе структуры «управляемый преобразователь — двигатель», в которой основное управляющее воздействие на электродвигатель оказывает напряжение для ДПТ, частота и напряжение для АД и СД.
Особое место среди замкнутых систем автоматического управления ЭП занимают системы следящего и программного управления.