Численная оптимизация регулятора для объекта размерностью 3x3
С целью решения поставленной задачи создадим проект системы в программе VisSim, как показано на рис. 12.43—12.45. Поскольку схема слишком велика, она представлена в виде отдельных фрагментов. При оптимизации на вход системы были поданы единичные ступенчатые воздействия, причем на первый вход оно подается с нулевым сдвигом, на второй вход — со сдвигом 40 с, на третий вход — со сдвигом 80 с. Это… Читать ещё >
Численная оптимизация регулятора для объекта размерностью 3x3 (реферат, курсовая, диплом, контрольная)
Управлению многоканальными объектами посвящено много публикаций [17, 18, 27, 28]. При этом даются числовые примеры, которые чаще всего ограничены размерностью 2×2, а сформулированные утверждения зачастую распространяются на произвольную размерность N х N. Следует признать, что распространение «по индукции» каких-либо утверждений на произвольный порядок требует выполнения двух условий: а) необходимо показать, что для некоторого значения N данное утверждение справедливо, б) также необходимо показать, что если данное утверждение справедливо для N, то оно справедливо и для N + 1, где N — произвольное целое число. Если же второе не доказано, то распространение ранее полученных результатов на результаты более высокого порядка не может считаться обоснованным.
В связи с этим даже при наличии результатов для объектов размерностью 2×2 не менее актуальным является исследование задач при более высокой размерности, в частности 3×3.
Кроме того, если в передаточной функции объекта содержатся наряду с минимально-фазовыми звеньями также и звенья чистого запаздывания, то даже для случая размерности 2×2 задача не решается аналитическими методами, но может быть решена методом численной оптимизации при математическом моделировании (симуляции) [36, 60]. Однако и в этом случае рост размерности увеличивает сложность решения задачи в квадрате, т. е. при переходе от N = 2 к N = = 3 сложность задачи возрастает пропорционально отношению квадратов, а именно в 9 / 4 = 2,25 раз.
В этом случае даже при наличии мощного программно-аппаратного обеспечения актуальной становится минимизация элементов в модели. Важными вопросами становятся обоснованность каждого элемента в целевой функции и обоснованность каждого элемента в регуляторе.
В настоящей главе выясняются обоснованность и важность каждого такого элемента методом численной оптимизации при математическом моделировании на примере трехканального объекта управления, содержащего в каждом канале минимально-фазовое звено и последовательно с ним включенное звено запаздывания.
Ниже рассматривается объект, который имеет три входа и три выхода, элементы матричной передаточной функции — фильтры третьего порядка с запаздыванием. Объект может быть описан передаточной функцией.
Передаточная функция объекта имеет вид 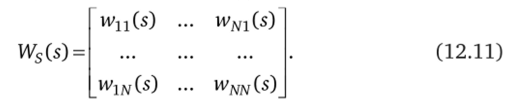
Следует отыскать передаточную функцию последовательного регулятора, который бы обеспечил управление согласно традиционным требованиям, а именно: автономность управления в статическом режиме (т.е. нулевые статические ошибки по каждому каналу), по возможности минимальные динамические ошибки (малое влияние управляющих сигналов по всем побочным каналам), по возможности малое перерегулирование (не более 20%, а если получится — не более 5%).
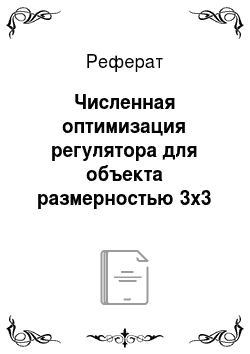
В общем виде передаточная функция регулятора может описываться в следующем виде: 
Можно заложить эти требования в целевую функцию все целиком, т. е. если хотя бы одно из таких требований не будет выполняться, то целевая функция резко возрастет.
Однако есть и более простой способ, а именно: целевая функция может быть построена лишь на основе интеграла от суммы модулей ошибок.
В более сложном виде в целевую функцию могут быть введены члены, которые возрастают при следующих условиях: а) превышение перерегулирования выше некоторого порога; б) превышение произведения ошибки на ее производную выше нуля или выше некоторого положительного порога; в) превышение интеграла от указанного выше превышения над неким заданным порогом, и т. д.
Ранее мы предлагали вводить так называемый детектор неправильных движений, который вычисляет интеграл от положительной части произведения ошибки на ее производную. В случае многоканального объекта следует брать интеграл от суммы таких произведений по каждому каналу. При оптимизации мы можем использовать сравнение результатов с двумя целевыми функциями: а) на основе интеграла от суммы ошибок; б) на этой же основе, но с введением детектора неправильных движений.
Самым простым регулятором является диагональный, т. е. регулятор, в матричной передаточной функции которого (12.12) ненулевые элементы находятся лишь в главной диагонали. Если этого будет недостаточно, необходимо будет ввести ненулевые члены во все элементы этой матричной передаточной функции.
Наиболее простыми для управления являются объекты, в которых передаточные функции в главной диагонали больше, чем в остальных элементах. Если такое условие не выполняется, но можно этого достичь изменением нумерации входов или выходов, мы рекомендуем это сделать. Если же этого достичь не удается, приходится работать с тем, что имеется. Поэтому будут рассмотрены примеры удачных сочетаний параметров объекта и неудачных сочетаний.
Мы рекомендуем использовать программу VisSim, поскольку она создана специально для симуляции динамических систем с обратной связью и для оптимизации регуляторов для них, хотя и это программное обеспечение не свободно от некоторых недостатков.
Пример 12.14. Рассмотрим объект с передаточной функцией.
(12.11), где Wy (s) = fcy exp{-TyS} / (ays2 + bys + 1). Конкретные численные значения коэффициентов даны в табл. 12.1.
Таблица 12.1
Коэффициенты модели объекта.
i | j | кИ | т". | аи | к |
i. | |||||
Окончание табл. 12.1
i. | } | ka | аУ | h | |
2,5. | |||||
1,5. | |||||
Требуется найти передаточную функцию в виде (12.12).
С целью решения поставленной задачи создадим проект системы в программе VisSim, как показано на рис. 12.43—12.45. Поскольку схема слишком велика, она представлена в виде отдельных фрагментов. При оптимизации на вход системы были поданы единичные ступенчатые воздействия, причем на первый вход оно подается с нулевым сдвигом, на второй вход — со сдвигом 40 с, на третий вход — со сдвигом 80 с. Это делает входные воздействия линейно независимыми, что позволяет обеспечить автономное управление с регулятором, получаемым при оптимизации. Если этого не делать, результат может не обеспечить требования автономности.
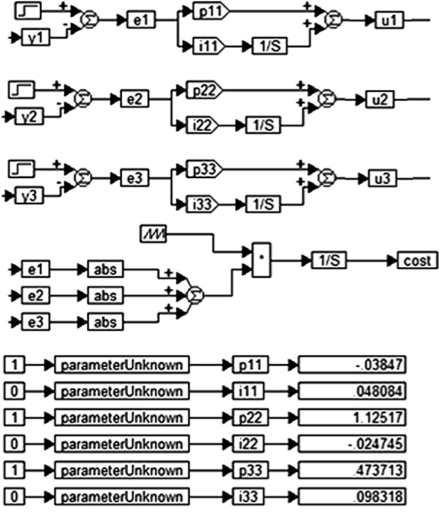
Рис. 12.43. Структура диагонального ПИ-регулятора при попытке использовать лишь пропорциональный и интегрирующий каналы и обойтись только диагональными элементами в матрице регулятора (часть 1 — регулятор).
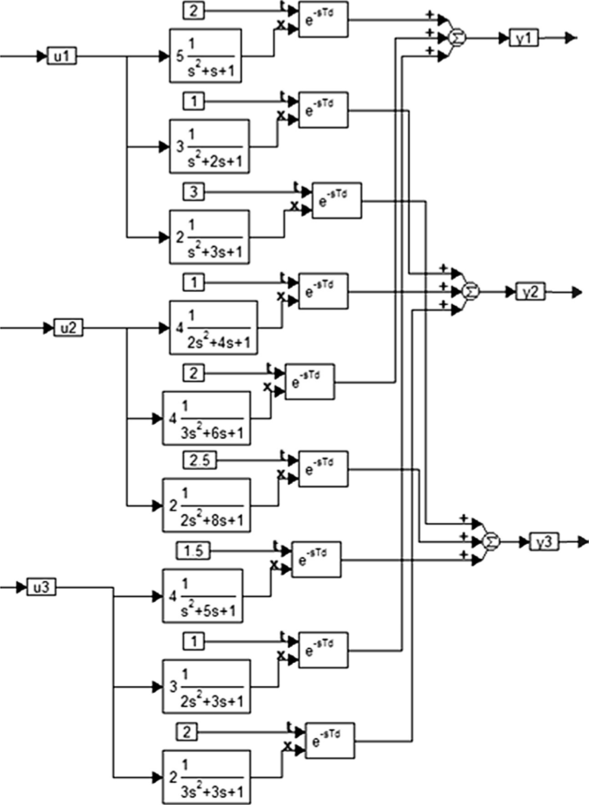
Рис. 12.44. Структура диагонального ПИ-регулятора при попытке использовать лишь пропорциональный и интегрирующий каналы и обойтись только диагональными элементами в матрице регулятора (часть 2 — объект).
Полученное уравнение регулятора имеет вид.

На рис. 12.45 показаны полученные переходные процессы в системе с таким диагональным регулятором. Из этих процессов очевидно, что.
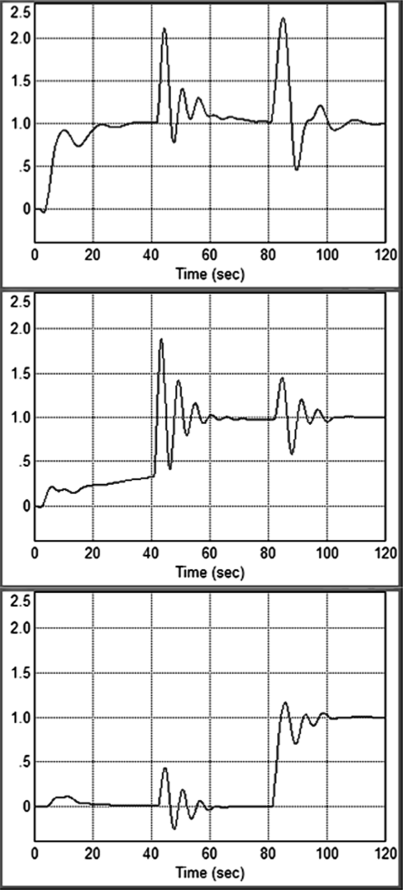
Рис. 12.45. Структура диагонального ПИ-регулятора при попытке использовать лишь пропорциональный и интегрирующий каналы и обойтись только диагональными элементами в матрице регулятора (часть 3 — осциллографы с выходными сигналами):
снизу вверх — первый, второй и третий каналы во втором канале процесс идет на первой трети графика не в нужную сторону, а именно, с течением времени выходная величина удаляется от предписанного значения. Это поведение процесса объясняется отрицательным коэффициентом перед интегральной компонентой регулятора второго канала, т. е. полинома, стоящего на пересечении второй строки и второго столбца. При заданной структуре объекта (все элементы главной диагонали положительны) коэффициент в интегрирующем тракте должен быть положительным.
Таким образом, полученный регулятор следует признать не соответствующим поставленной задаче.
Пример 12.15. Для управления тем же объектом введем в регулятор дифференцирование. Тогда регулятор будет таким, как показано на рис. 12.46. Полученные переходные процессы изображены на рис. 12.47.
Теперь нет неправильного по статике участка ни в одном канале, но перерегулирование велико. Полученный регулятор описывается следующей передаточной функцией: 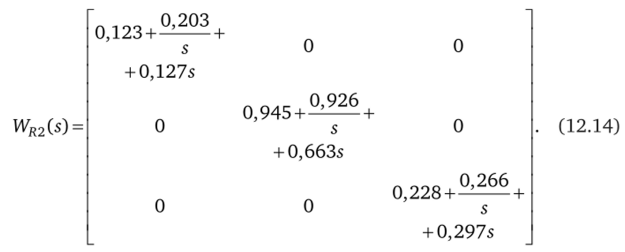
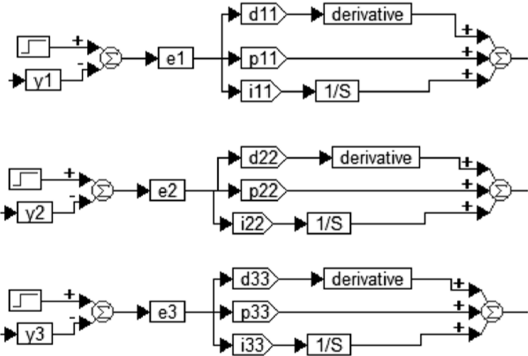
Рис. 12.46. Диагональный ПИД-регулятор в соответствии с примером 12.15.
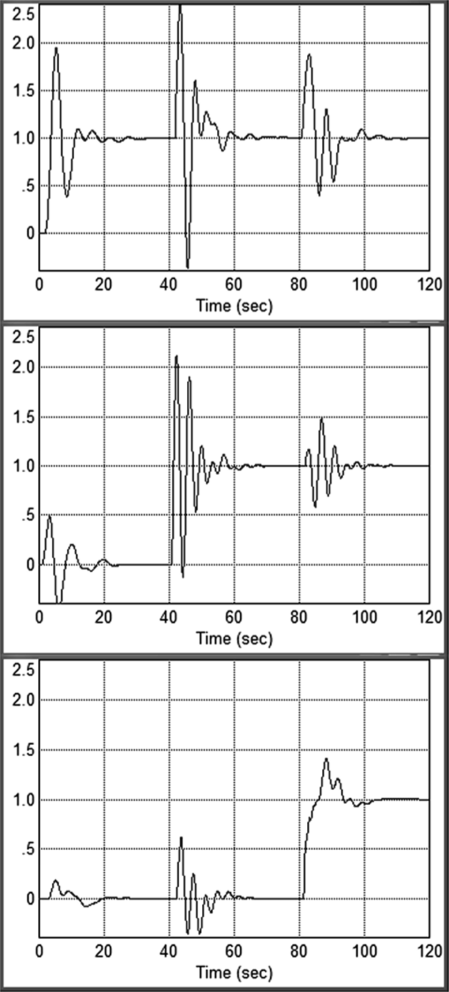
Рис. 12.47. Результаты оптимизации диагонального ПИД-регулятора.
по примеру 12.15.
Теперь все коэффициенты при интеграторах положительны. Ста тическая ошибка в каждом канале равна нулю, что выражается в том что все переходные процессы со временем заканчиваются на тех значениях, которые подаются на вход системы. Перерегулирование в первом канале достигает 150%. Во втором канале оно лишь немногим меньше — около 110%, в третьем канале оно достигает 60%.
Таким образом, с рассмотренным регулятором задача в целом решена, но перерегулирование чрезвычайно велико, поэтому результат также нельзя считать удовлетворительным.
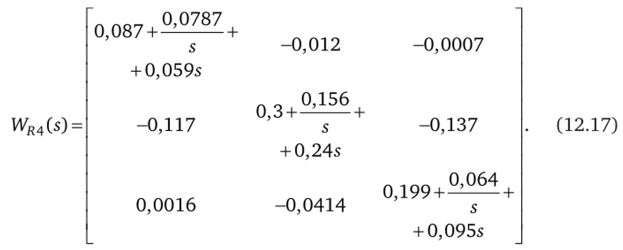
Пример 12.16. Рассмотрим тот же объект, будем использовать регулятор, в котором в главной диагонали матрицы передаточной функции регулятора содержатся скалярные ПИ-регуляторы, а в остальных ее элементах — пропорциональные регуляторы. При этом будем использовать ту же целевую функцию и те же входные воздействия. На рис. 12.48 показана соответствующая структура регулятора, а на рис. 12.49 — результаты в виде переходных процессов. Передаточная функция полученного регулятора имеет вид.

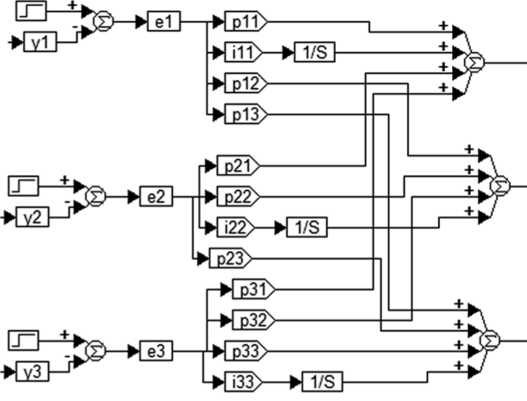
Рис. 12.48. Регулятор по примеру 12.16.
Результаты значительно лучше, чем в предыдущих примерах, однако по первому каналу перерегулирование все же велико, около 80%. Данная система для некоторых применений может оказаться приемлемой, но в большинстве случаев такая большая величина перерегулирования все же не удовлетворяет требованиям технологического процесса.
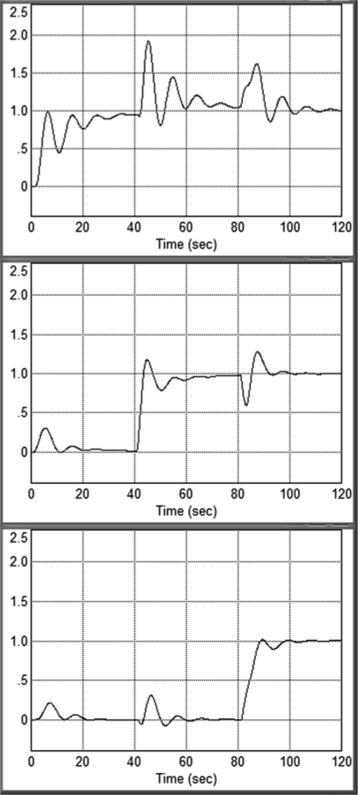
Рис. 12.49. Результаты оптимизации регулятора по примеру 12.16.
Пример 12.17. Рассмотрим тот же объект и тот же регулятор, но при этом введем в целевую функцию детектор неправильных движений на основе произведения ошибок каждого канала на их производные. От этих произведений берутся лишь положительные части, которые суммируются с интегрированием, после чего результат добавляется в стоимостную функцию. Поскольку вычислитель стоимостной функции уже содержит интегратор, можно ограничиться только одним общим интегратором, а суммирование осуществить на его входе. На рис. 12.50 показана соответствующая структура для вычисления стоимостной функции. При этом используется весовой коэффициент, равный 10.
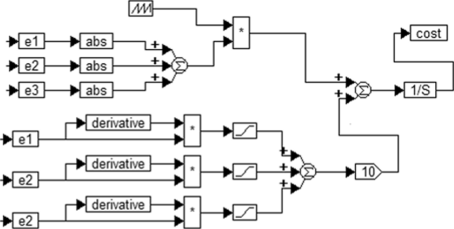
Рис. 12.50. Структура для вычисления стоимостной функции, включающая детектор неправильных движений.
Полученный регулятор имеет следующую передаточную функцию:

Полученные переходные процессы показаны на рис. 12.51. Перерегулирование в первом канале теперь не превышает 50%, а в других каналах оно не более 25%.
Можно использовать другой весовой коэффициент, например, равный пяти. Получаемые при этом переходные процессы представлены на рис. 12.52. Видно, что перерегулирование в первом канале возросло до 60%. Поэтому данный результат не лучше, чем результат с регулятором (12.6).
Можно также увеличить весовой коэффициент, например, до 20. Соответствующие переходные процессы показаны на рис. 12.53. Перерегулирование в первом канале упало до 40%, но длительность переходных процессов сильно возросла, они стали затянутыми. Поэтому результат с регулятором по соотношению (12.6) следует признать лучшим при такой его заданной наперед структуре среди всех полученных в этом примере и в предыдущих примерах.
Пример 12.18. Рассмотрим тот же объект и ту же целевую функцию, что и в примере 12.17, но будем использовать регулятор, в котором в главной диагонали содержатся скалярные ПИД-регуляторы, а в остальных элементах матрицы будут коэффициенты. При этом также использовались значения весового коэффициента, равные 5, 10 и 20. Полученные переходные процессы показаны на графиках рис. 12.54, 12.55 и 12.56 соответственно. На процессах, показанных на рис. 12.54, перерегулирование первого канала не более 40%, в других каналах — существенно меньше. При этом процессы не слишком затянуты. На других графиках процессы не лучше, имеется затягивание переходных процессов. Поэтому предлагается предпочесть результат, полученный при весовом коэффициенте, равном пяти.
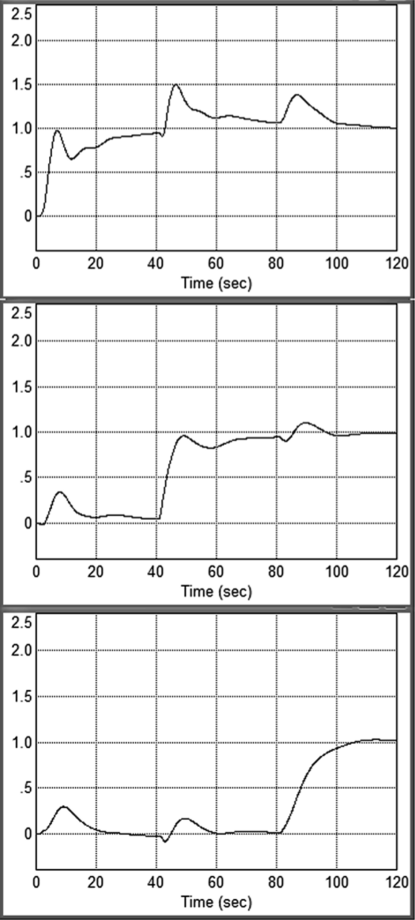
Рис. 12.51. Полученные переходные процессы по примеру 12.17.
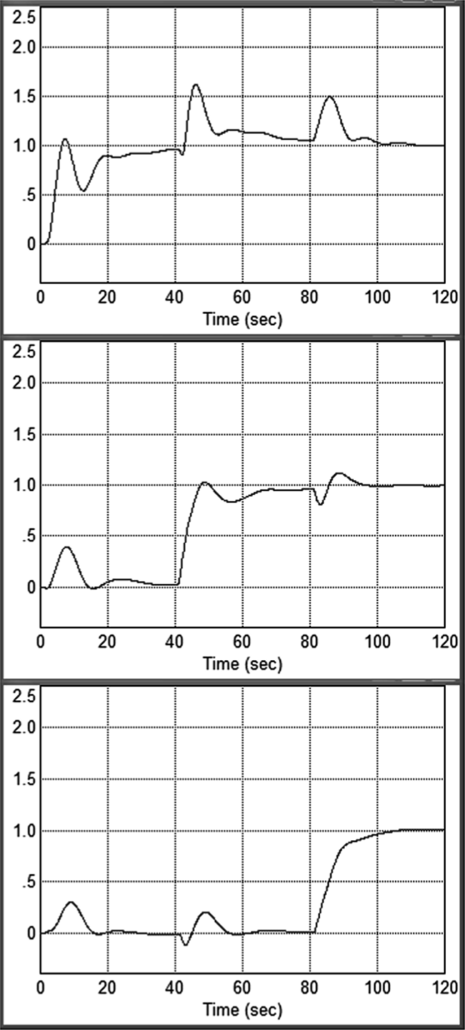
Рис. 12.52. Полученные переходные процессы по примеру 12.17 при использовании весового коэффициента 5.
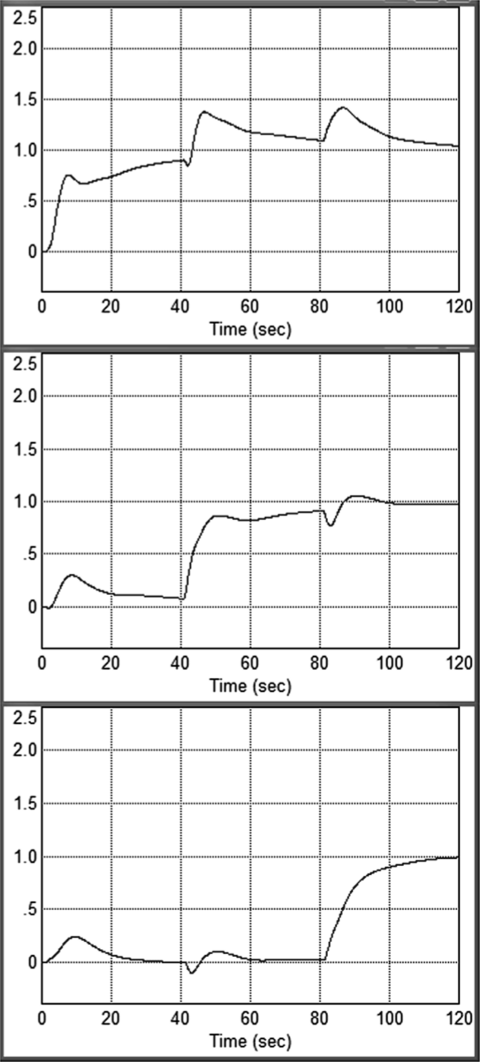
Рис. 12.53. Полученные переходные процессы по примеру 12.17 при использовании весового коэффициента 20.
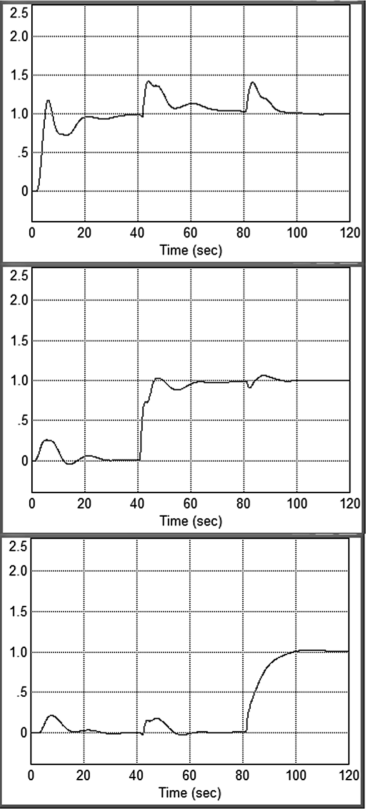
Рис. 12.54. Полученные переходные процессы по примеру 12.18 при использовании весового коэффициента 5.
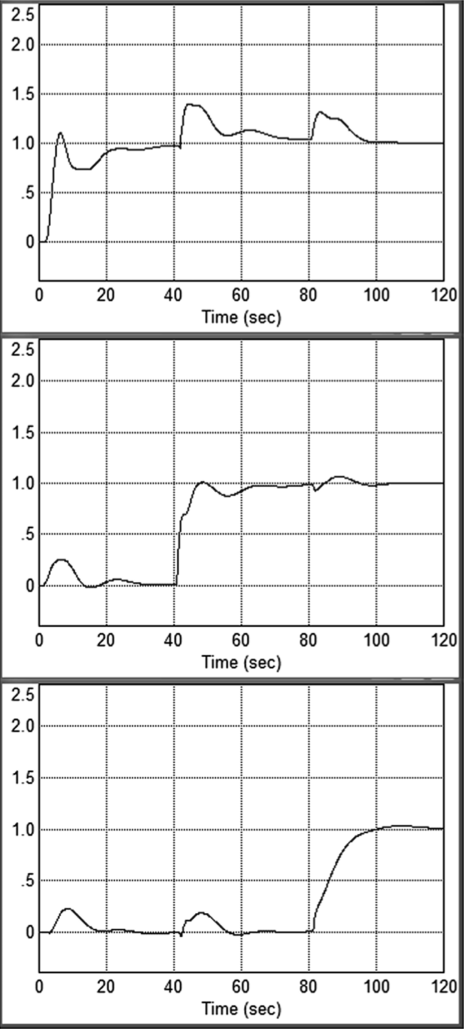
Рис. 12.55. Полученные переходные процессы по примеру 12.18 при использовании весового коэффициента 10.
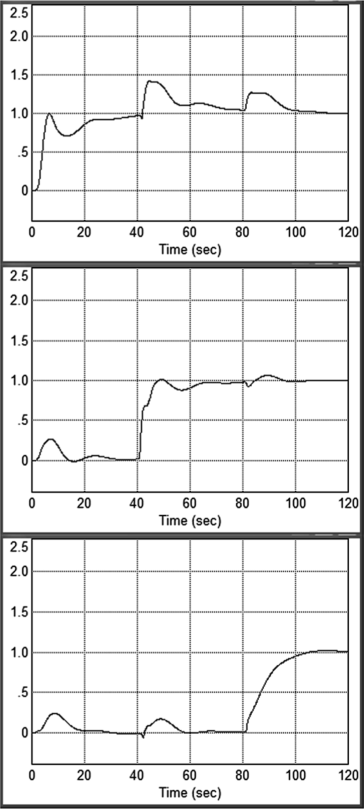
Рис. 12.56. Полученные переходные процессы по примеру 12.18 при использовании весового коэффициента 20.
Полученный регулятор описывается следующей передаточной функцией:
Для сравнения на рис. 12.57 показаны переходные процессы с таким же регулятором, рассчитанным при использовании нулевого коэффициента для детектора неправильных движений. В этом случае перерегулирование в первом канале составляет 110%. Даже при самой сложной структуре регулятора отказ от детектора неправильных движений приводит к тому, что задача решается не столь успешно.
Таким образом, показано, что использование детектора неправильных движений явилось одним из ключевых подходов, необходимых для решения задачи синтеза регулятора для управления трехканальным объектом.
Другие важные принципы оптимизации состоят в том, что входные воздействия должны быть линейно независимыми, в стоимостную функцию входит интеграл от суммы модулей ошибок, в главной диагонали следует использовать наиболее сложные (и поэтому наиболее эффективные) ПИД-регуляторы. В этом случае в неглавных связях могут быть применены всего лишь пропорциональные регуляторы. При этом управление может быть получено приемлемым, а именно обеспечена автономность управления, нулевые статические ошибки по каждому каналу, перерегулирование в худшем случае не превышает 40%.
Естественно, что более сложные регуляторы могут дать лучшие результаты, однако применение ПИД-регуляторов в каждом тракте потребовало бы оптимизации 27 коэффициентов, что превышает возможности используемой нами версии программы VisSim.
Однако если по условиям задачи все же необходимо снижение перерегулирования, можно предложить один из следующих путей.
Во-первых, можно предложить использование самой последней версии программы VisSim или иного программного обеспечения для оптимизации требуемого количества параметров.
Во-вторых, если первый вариант недоступен, можно предложить применение, например, метода замороженных коэффициентов, а именно, после оптимизации наибольшего возможного количества параметров можно зафиксировать их, после чего осуществить оптимизацию следующей части параметров. Затем зафиксировать и их, после чего осуществить оптимизацию оставшихся параметров. После этого можно вернуться к первой группе параметров и т. д. до тех пор, пока не будет получено приемлемое качество управления.
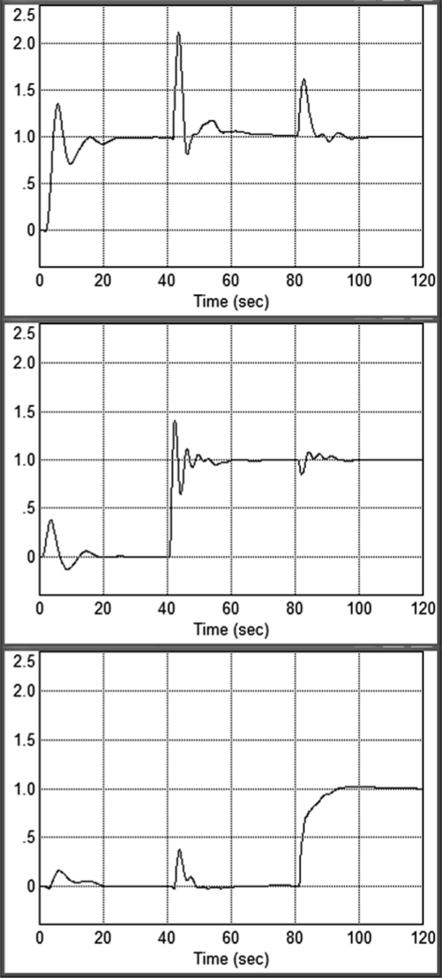
Рис. 12.57. Полученные переходные процессы по примеру 12.18 при использовании нулевого весового коэффициента для сравнения.