Динамические погрешности.
Акустооптические процессоры.
Алгоритмы и погрешности измерений
Условие (2.51) можно интерпретировать таким образом: для Ifo — fI = const, уменьшая скорость перестройки частоты упри фиксированном Т0, или уменьшая апертуру при фиксированной у, или же уменьшая оба эти параметра (девиацию), можно выполнить это условие и, таким образом, на любой частоте получить СФ сколь угодно мало отличающуюся от СФ радиоимпульса длительности Т0. Например, задавшись условием… Читать ещё >
Динамические погрешности. Акустооптические процессоры. Алгоритмы и погрешности измерений (реферат, курсовая, диплом, контрольная)
Рассмотрим динамические погрешности измерения с помощью АОИПС законов изменения частоты и огибающей ЧМ-сигнала, связанные с выбором апертурного времени АОД Т0 и алгоритмом измерения частот f (tn) и уровней a (tn) сигнала.
Рассмотрение погрешностей этого вида базируется, во-первых, на знании особенностей формирования РИСС на фотоириёмнике при прохождении через апертуру АОД фрагментов ЧМ-сигнала. И, вовторых, эти погрешности связаны с алгоритмом обработки РИСС, т. е. со способом извлечения из него требуемой информации о частотах f (t") и уровнях a (t"). Рассмотрим эти вопросы подробнее.
Исследуем сначала зависимость вида РИСС, формирующегося на фотоприёмнике, от апертурного времени Т0 и скорости у изменения частоты ЛЧМ-сигнала, проходящего через апертуру АОД.
При заполнении апертуры АОД ЛЧМ-сигналом с прямоугольной огибающей амплитуды U на фотоириёмнике формируется РИСС, соответствующее спектральной функции (СФ) вида: 
где fo — значение частоты ЛЧМ-сигнала в начале апертуры, т. е. в момент времени t = 0.
После преобразований в показателе степени (2.38) и дополнения его до полного квадрата, получим для G (f) следующее выражение:

Выполнив в интеграле (2.39) замену переменной:  придем к выражению:
придем к выражению:

где  — девиация частоты в апертуре АОД, В — база ЛЧМ-сигнала в апертуре АОД.
— девиация частоты в апертуре АОД, В — база ЛЧМ-сигнала в апертуре АОД.
Комплексный интеграл Френеля, входящий в (2.40), может быть представлен следующим образом:

где  — интегралы Френеля. Обозначая.
— интегралы Френеля. Обозначая.

можно преобразовать интеграл Френеля (2.41) к виду.

где  , vj/ = arctg (Sg/Cg) — модуль и аргумент интеграла Френеля.
, vj/ = arctg (Sg/Cg) — модуль и аргумент интеграла Френеля.
Воспользуемся при вычислении (2.43) приближёнными выражениями [37, 38] интегралов Френеля:

обеспечивающими вычисления с погрешностью, определяемой третьими слагаемыми и не превышающей величины 2/(JTq').
Используя в (2.42) формулы (2.44) и вычисляя затем модуль и аргумент интеграла Френеля, получим для |а| «5 следующие выражения: 
С учётом (2.45) и (2.46) интеграл Френеля (2.43) можно записать следующим образом:

После подстановки этого интеграла в выражение (2.40) с учётом обозначений для «а» и «8» получим выражение для СФ:

представляющее собой выражение для СФ радиоимпульса длительности То.
Проведём анализ условия |а|" 8, при котором выражение для СФ ЛЧМ-импульса совпадает с выражением для СФ радиоимпульса.
Условие |а|"8, с учётом принятых обозначений, может быть представлено в трёх следующих эквивалентных формах:

Условие (2.49) означает, что для ЛЧМ-импульса с любой базой и у = const можно указать такое значение | f0— f I, начиная с которого СФ ЛЧМ-импульса длительности Т() практически не будет отличаться от СФ радиоимпульса той же длительности. Иными словами, СФ ЛЧМимпульса и простого радиоимпульса такой же длительности при больших значениях lfo-fl близки и, но мере увеличения lfo-fl асимптотически сходятся.
К этому же результату приводит анализ условия (2.50), согласно которому для справедливости (2.48) величина lfo-fl должна быть значительно больше девиации частоты АРд в апертуре АОД. Тот факт, что в неравенство (2.50) не входит апертурное время Т0, говорит о том, что его изменение отражается на форме СФ ЛЧМ-импульса в области частот f()+ ДИд для у > 0 и f()— АРд для у < 0, но не сказывается на положении на оси частот того участка СФ, который описывается выражением (2.49).
Условие (2.51) можно интерпретировать таким образом: для Ifo — fI = const, уменьшая скорость перестройки частоты упри фиксированном Т0, или уменьшая апертуру при фиксированной у, или же уменьшая оба эти параметра (девиацию), можно выполнить это условие и, таким образом, на любой частоте получить СФ сколь угодно мало отличающуюся от СФ радиоимпульса длительности Т0. Например, задавшись условием, чтобы в области частот I fo — f I = 1 /Т0 было справедливо условие (2.51), получим.

Это выражение показывает, как нужно выбирать апертурное время Т0 при данной у, чтобы влиянием частотной модуляции на форму СФ на частотах f0± 1/Т0 можно было пренебречь.
Аналогичное условие можно получить из выражения (2.50) в виде.

Нарушая данное условие (увеличивая апертуру АОД Т0) можно проследить динамику превращения СФ радиоимпульса (2.48) в СФ ЛЧМ-импульса и изучить законы формирования последней.
Результат аналогичный (2.52), названный квазигармоническим условием, приведен в [39] в форме:

где ?(t) — закон изменения фазы колебания U (t) = Ucos (2rt[f0t + ^(t)]).
Учитывая, что для ЛЧМ-сигиала величина — 0,5Т()), фигурирующая в (2.54), имеет смысл скорости перестройки частоты у, получим из (2.54) условие: 
которое с точностью до постоянного множителя совпадет с условием (2.52).
Квазигармоническое условие в форме (2.55) можно получить и другим способом [4]. Как известно, вид СФ любого импульса зависит от его длительности, формы огибающей, вида и параметров внутриимпульсной модуляции. В частности, для ЛЧМ-имнульса с прямоугольной огибающей, как следует из (2.38), вид СФ определяется скоростью перестройки частоты и протяжённостью временного окна Т0. Оценим степень влияния на вид СФ величин Т0 и у.
При отсутствии модуляции, т. е. когда у = 0, выражение (2.38) превращается в СФ радиоимпульса, вид которой определяется только размером апертуры. При наличии частотной модуляции форма СФ определяется и размером апертуры, и девиацией частоты ДРд в апертуре АОД. Степень влияния этих двух факторов на вид СФ различна и зависит от соотношения полос частот АИд и 2/Т0. При этом очевидно, что, если 2/Т()«АРд, то вид СФ определяется в основном длительностью импульса, в противном случае он определяется девиацией частоты. Подставив в последнее неравенство ДРд=уТ() и разрешив его относительно Т0, придём к выражению (2.55).
Динамика формирования СФ ЛЧМ-импульса (рис. 2.36 и 2.37) была исследована иа математической модели.
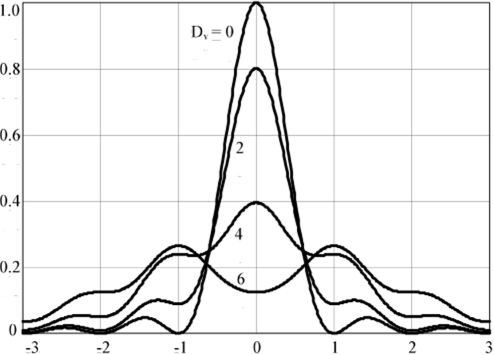
Рис. 2.36.
В основу моделирования был положен вариант условия (2.53) ДРд" 1 /То, причем это условие для удобства моделирования было заменено равенством ДРдТ0= Dv, или.

При вычислении СФ ЛЧМ-импульса длительность Т0= 1 не изменялась, а величина Dv (безразмерный коэффициент, соответствующий девиации) увеличивалась от значения Dy = 0, что соответствует СФ немодулированного радиоимпульса, до Dv = 6, что соответствует СФ ЛЧМ-импульса с девиацией 6.
По рис. 2.36 можно проследить превращение СФ радиоимпульса в СФ ЛЧМ-импульса. Видно, что с увеличением девиации СФ начинает деформироваться. Деформация проявляется в снижении главного максимума СФ и одновременном росте уровней боковых максимумов; в исчезновении нулей СФ и появлении плавных переходов между экстремумами.
На рис. 2.37 в координатах девиация частоты — уровень показаны: 1 — уровень главного экстремума; 2 — уровни 1-х боковых экстремумов и 3 — уровни 2-х боковых экстремумов.
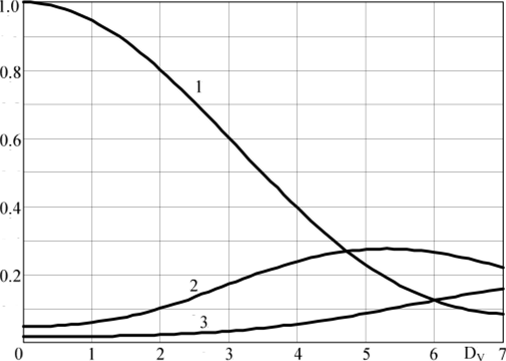
Рис. 2.37.
Как видно из рис. 2.37, уровни глобального и первых боковых экстремумов совпадают при Dv = 4,7; следовательно, для Dv<4,7 СФ сохраняет один глобальный максимум.
Если теперь обратиться к (2.56), подставив туда ДРд=уТ() и Dv=4,7, и разрешить его относительно Т0, то получим, что центральный максимум РИСС сохраняется лишь до тех пор, пока выполняется условие.

Условие (2.52) было получено в предположении, что анализируемым сигналом для АОИПС является ЛЧМ-сигнал со скоростью изменения частоты у. Чтобы расширить это условие, т. е. сделать его пригодным и для ЧМ-сигнала, следует учесть, что у ЧМ-сигнала скорость изменения частоты является функцией времени y (t), меняющейся в некоторых пределах (от ут,п до утах). Следовательно, в случае ЧМсигнала, в формулу (2.52) вместо у нужно подставлять утах (так сделано в формуле 1.3). Тогда, выбирая Т0 из условия (1.3), можно при анализе ЧМ-сигнала получать на фотоприёмнике РИСС, форма которого практически не будет отличаться от формы СФ радиоимпульса. На практике возможны ситуации, когда скорость изменения частоты заранее неизвестна; тогда в (1.3) подставляют максимальное ожидаемое значение скорости изменения частоты у1Пах.
В алгоритмах измерения частоты ЧМ-сигналов, используемым свойством РИСС, сформированных на фотоприёмнике, при выполнении условия (1.3), является свойство, заключающееся в том, что получающееся РИСС имеет один глобальный максимум, расположенный на его оси симметрии. Абсцисса этого максимума (как и абсцисса оси симметрии) соответствует средней частоте, а ордината — уровню сигнала.
В одном из алгоритмов (алгоритме № 1) о средней частоте ЧМсигнала судят по положению глобального максимума РИСС на фотоприёмнике. Поскольку информация в АОД и на фотоприёмнике постоянно обновляется, то наблюдение за уровнем и пространственным положением глобального максимума позволяет получать информацию о текущем среднем уровне сигнала и о текущей средней частоте.
Отметим, что этот алгоритм работоспособен (в части измерения частоты) лишь до тех пор, пока выполняется условие (2.57). При его невыполнении, в РИСС исчезает глобальный максимум.
Что же касается измерения текущих значений огибающей ЧМсигнала, то анализ рис. 2.36 показывает, что абсолютные погрешности в её измерении (всегда положительные) появляются при любой девиации частоты. В то же время, очевидно, что для ЛЧМ-сигнала можно измерить (с точностью до погрешностей аппроксимации) форму огибающей, нс привязываясь к абсолютным значениям уровня сигнала.
В другом алгоритме (алгоритме № 2) измерения средней частоты ЧМ-сигнала её значение отождествляют со значением абсциссы оси симметрии РИСС на фотоприёмнике. Аппаратурная реализация алгоритма описана в гл.З. Уровень сигнала на оси симметрии РИСС соответствует, как уже отмечалось, уровню огибающей. Структурная схема АОИПС. реализующего этот алгоритм измерения частоты приведена на рис. 1.2.
Поскольку РИСС, формирующееся на фотоприёмнике, сохраняет симметрию для ЛЧМ-сигнала с любой девиацией, то алгоритм № 2 пригоден для измерения частоты даже при невыполнении условия (2.57). Возможности измерения мгновенных значений огибающей у обоих алгоритмов одинаковы.
Рассмотрим особенности измерения с помощью АОИПС закона изменения частоты f (t") ЧМ-сигналов и оценим погрешности измерения этого закона, связанные с выбором апертурного времени Т0 и алгоритмом измерений.
Пусть анализируемым сигналом для АОИПС является радиосигнал S (t) вида 
где  — полная фаза, а (р0 — начальная фаза колебания S (t).
— полная фаза, а (р0 — начальная фаза колебания S (t).
Чтобы уяснить смысл остальных величии, входящих в vp (t), возьмём от неё производную по времени:

Правая часть выражения (2.59) соответствует закону изменения частоты f (t) = fn+ yt + (5С, в котором f0 — начальная частота сигнала.
Взяв производную по времени от f (t) получим закон изменения скорости перестройки частоты.

в течение длительности ЧМ-сигнала. Очевидно, что у = у (0) в выражении (2.60) имеет смысл начальной скорости изменения частоты, а 2р — ускорения изменения частоты. Для ЧМ-импульса длительностью т конечная (в конце импульса) скорость изменения частоты составит величину у (т) = у + 2(3т.
Рассмотрим конкретный пример, иллюстрирующий особенности измерения мгновенных частот двух сигналов одинаковой длительности т. Один из сигналов — ЛЧМ-импульс с параметрами: т = 4 мкс и у=1МГц/мкс. Другой — ЧМ-импульс с т = 4мкс, у=1МГц/мкс, (3 = 1 МГц/мкс2. Законы изменения частоты этих сигналов (при f0 = 0) представлены на рис. 2.38.
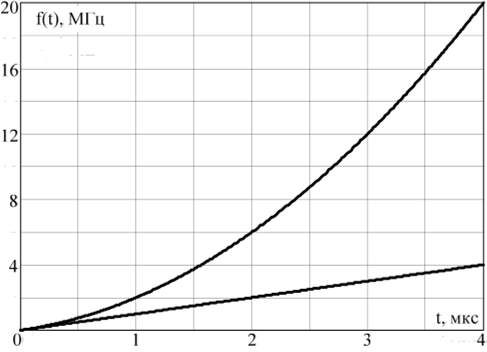
Рис. 2.38.
Скорость изменения частоты у у ЛЧМ-импульса (нижний график) постоянна и равна у= 1 МГц/мкс. Скорость изменения частоты ЧМимпульса (верхний график) в соответствии с нашими исходными данными меняется от ymj" = у (0) = 1 МГц/мкс до упмх = у (4) = 9 МГц/мкс.
Рассмотрим формы РИСС, формирующихся на фотоприемнике при анализе ЧМ-импульса, для двух вариантов выбора апертурного времени Т0. В первом варианте подставим в квазигармоническое условие (1.3) начальное значение у (0) скорости перестройки частоты: у min= 1 МГц/мкс и получим T0i = 1 мкс. Во втором варианте подставим туда же конечное значение у (4) скорости перестройки частоты:
Ymax= 9 МГц/мКС; получим Т02= 0,33 МКС.
На рис. 2.39 показаны РИСС для 1-го варианта (T0i= 1 мкс, f0= 100 МГц): 1 — аппаратная функция (вида (sinc (x))"); она соответствует РИСС немодулированного сигнала; 2 — РИСС2 для.
Ymin= 1 МГц/мкс и AFa= 1 МГц; 3 — РИССЗ для утах= 9 МГц/мкс и AFfl= 9 МГц.
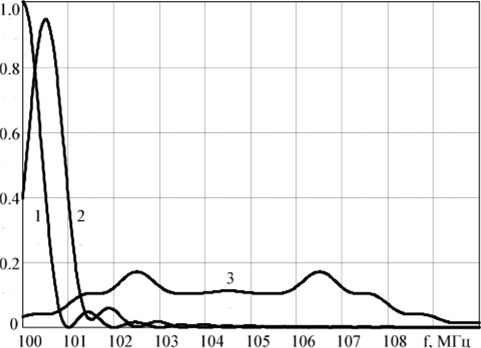
Рис. 2.39.
Видно, что абсцисса оси симметрии РИСС2 (100,5 МГц) соответствует средней частоте ЛЧМ-сигнала с т = Т0| и девиацией частоты I МГц. Аналогично абсцисса оси симметрии РИССЗ (104,5 МГц) соответствует средней частоте ЛЧМ-сигнала с т = Т()| и девиацией частоты 9 МГц. Смещения средних частот относительно f0 составляют половину девиации частоты. Это соответствует теоретическим представлениям.
Отметим, что РИСС2 пригодно для измерения частоты по обоим алгоритмам, в то время как РИССЗ подходит только под второй алгоритм. Для оценки уровня сигнала пригодно только РИСС2.
На рис. 2.40 показаны РИСС для 2-го варианта (Т()2= 0,33 мкс). Остальные обозначения совпадают с обозначениями рис. 2.39. Девиация частоты для РИСС2 равна 0,33 МГц, а для РИССЗ — 2,97 МГц.
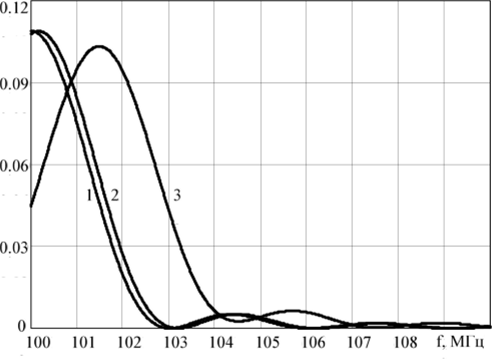
Рис. 2.40.
На рис. 2.40, так же как и на предыдущем, абсциссы осей симметрии РИСС совпадают со средними частотами соответствующих ЛЧМимпульсов. А эти частоты смещены относительно fo на половину девиаций частоты. Очевидно, что обе РИСС (РИСС2 и РИССЗ) пригодны для измерения мгновенных частот и уровней сигнала по обоим алгоритмам. На рис. 2.41 представлены РИСС для 4-х фрагментов ЧМимпульса (его закон изменения частоты показан на рис. 2.38 верхней кривой) для апертурного времени Т,и = 1 мкс. Цифрой 1 на этом рисунке обозначено РИСС 1-го фрагмента ЧМ-импульса, т. е. фрагмента от момента t = 0 мкс до момента t = 1 мкс, а цифрой 4 обозначено РИСС последнего фрагмента: от t = 3 мкс до t = 4 мкс.
Начальные частоты f() фрагментов соответствуют следующим значениям: fUi= ЮОМГц; fO2=102Mru; fO3=106Mrn; fo4=112Mru, а девиации частот ДРд равны: ДРд| = 2МГц; ДРдз=4МГц; ДРДз= 6 МГц; ДРд4= 8 МГц.
Видно, что во всех случаях РИСС несимметричны и немного сдвинуты по частоте, о чем говорится ниже.
Для измерений мгновенной частоты и уровня по обоим алгоритмам пригодны первый и второй фрагменты, а остальные фрагменты пригодны для измерения частоты только по второму алгоритму.
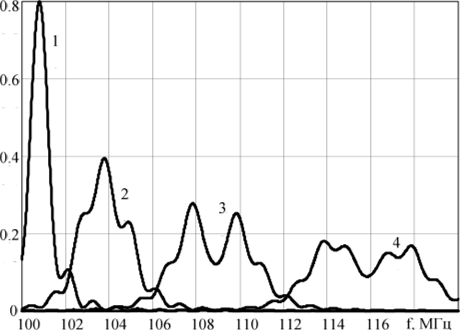
Рис. 2.41.
Проведенное рассмотрение показывает, что использование первого алгоритма измерения параметров и неверный выбор апертурного времени Т0 может привести к зависимости результатов измерений от вида и параметров ЧМ. Проиллюстрируем это на конкретных примерах. На рис. 2.42 показаны: I — РИСС ЧМ и 2 — ЛЧМ-сигналов.

Рис. 2.42.
Сигналы имеют одинаковые длительности (равные апертурному времени TUi= 1 мкс) и одинаковые девиации частоты (ДРд=2МГц). РИСС ЧМ-сигнала совпадает с РИСС первого фрагмента, показанного на рис. 2.41. Поскольку апертурное время T0i и девиация частоты ДИд у сигналов одинаковы, то одинаковы и скорость у перестройки частоты ЛЧМ-сигнала и средняя скорость уср перестройки частоты ЧМсигнала. Она составляет: у =уср= 2 МГц/мкс. Нетрудно убедиться, что квазигармоническое условие в данном случае не выполняется, поскольку Toi не должно превышать T0i ~ 0,71 мкс.
На положении на оси частот абсциссы оси симметрии РИСС2 (ЛЧМ-сигнала) невыполнение квазигармонического условия не отразилось. Она (ось) смещена относительно f()= 100 МГц на 1 МГц, т. е. на половину девиации частоты.
В случае ЧМ-сигнала смещение абсциссы (как и на рис. 2.41) максимума РИСС1 составило 0,8 МГц. Такое смещение соответствует, повидимому, средней частоте рассматриваемого ЧМ-сигнала.
Чтобы убедиться (качественно), в том, что средняя частота ЧМсигнала меньше средней частоты ЛЧМ-сигнала (длительности сигналов и их девиации равны), рассмотрим рис. 2.43, на котором показаны реализации соответствующих сигналов (вверху — реализация ЛЧМсигнала).
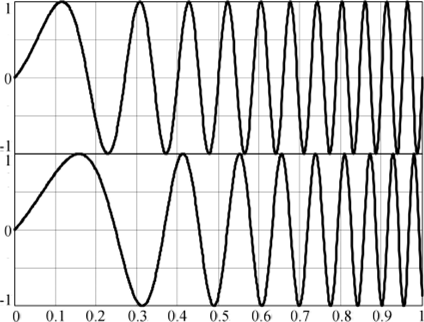
Рис. 2.43.
Видно, что если к концу временного интервала 1 мкс периоды осцилляций на графиках примерно равны, то в начале интервала, период колебания у ЧМ-сигнала больше, а начальная (и, значит, средняя) частота меньше.
На рис. 2.44 (также как и на рис. 2.42) показаны: 1 — РИСС ЧМ и 2 — ЛЧМ-сигналов. Они соответствуют второму фрагменту рис. 2.41 и имеют: ДРд=4МГц, у = уср= 4 МГц/мкс.
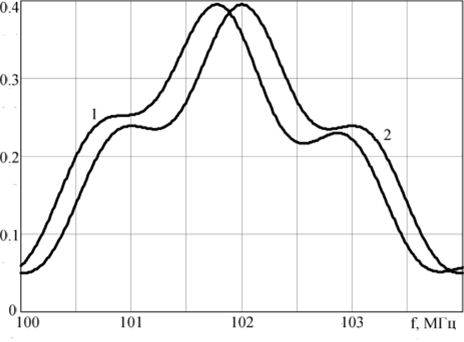
Рис. 2.44.
Здесь мы качественно наблюдаем те же эффекты (см. выше), что и на рис. 2.42. Кроме того, заметна асимметрия РИСС1 ЧМ-сигнала, относительно ординаты его максимума (см. рис. 2.41), связанная с нелинейностью закона частотной модуляции.
На рис. 2.45. и 2.46 показаны: 1 — РИСС ЧМ и 2 — ЛЧМ-сигналов, соответствующих третьему и четвёртому фрагментам рис. 2.41.
Они отличаются от РИСС рис. 2.42 девиацией частоты. На рис. 2.45 ДРд=6МГц, а на рис. 2.46 — ДРд=8МГц. Скорости перестройки частоты: на рис. 2.45 у = уср= 6 МГц/мкс, а на рис. 2.46 8 МГц/мкс.
Распределения, относящиеся к ЧМ-сигналам на этих рисунках ещё более (чем предыдущие) несимметричны из-за нелинейности закона ЧМ. Кроме того, у них отсутствуют глобальные максимумы.
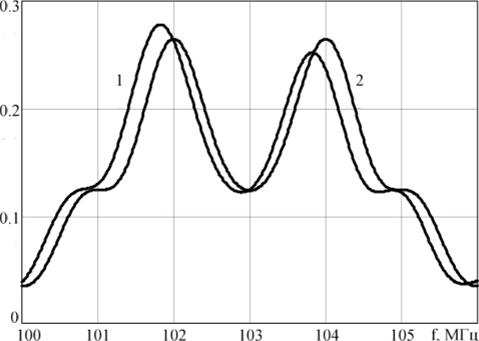
Рис. 2.45.
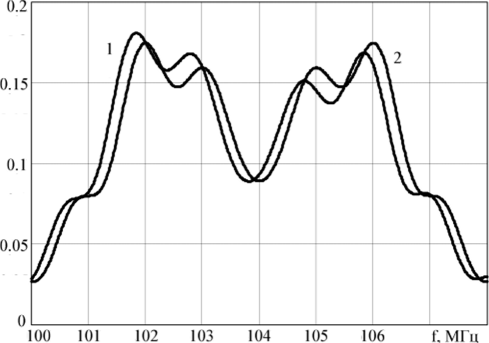
Рис. 2.46.