Плоскоременные передачи.
Детали машин и основы конструирования.
Передачи
На рис. 9.3 показана кинематическая схема с геометрическими параметрами простейшей плоскоременной передачи, состоящая из двух шкивов, расположенных на межосевом расстоянии а. Соответственно известны диаметры шкивов Z), и /)2, частоты вращения я, и я2, а также углы охвата а, = 180°- р для меньшего шкива и а2 = 180° + р для большего. Простейшие плоскоременные передачи обеспечивают кинематическую… Читать ещё >
Плоскоременные передачи. Детали машин и основы конструирования. Передачи (реферат, курсовая, диплом, контрольная)
Простейшие плоскоременные передачи обеспечивают кинематическую связь между различными валами: параллельными 1 и 2 (рис. 9.2,а); перекрещивающимися 3 и 4 (рис. 9.2,?); с различными по диаметру 5 и 6 шкивами (рис. 9.2,в).
Геометрические и кинематические соотношения.
На рис. 9.3 показана кинематическая схема с геометрическими параметрами простейшей плоскоременной передачи, состоящая из двух шкивов, расположенных на межосевом расстоянии а. Соответственно известны диаметры шкивов Z), и /)2, частоты вращения я, и я2, а также углы охвата а, = 180°- р для меньшего шкива и а2 = 180° + р для большего.
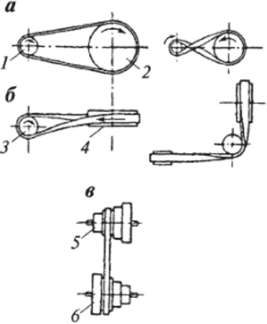
Рис. 9.2. Виды простейших плоскоременных передач
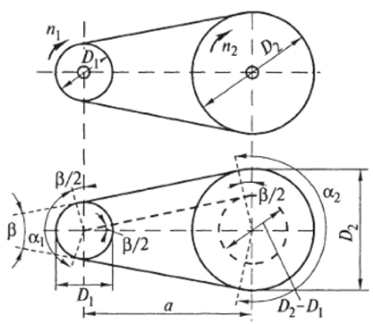
Рис. 9.3. Геометрические зависимости в простейшей ременной передаче
Дополнительный угол р = arcsin (Z)2— А)/2д и длина обвода ремня.

Обычно угол Р не более 15°, поэтому можно записать р = = 57(Z)2-Z),)/a. При этом a = 180o-57(Z)2-Z>i)/fl.
Соответственно линейные скорости:
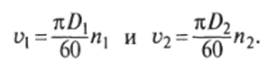
Если меньший шкив ведущий, то вследствие некоторого скольжения ремня и2 < У| или v2 = У|(1 — е), где коэффициент проскал 1>зывания обычно небольшой: е ~ 0,01…0,02. Тогда передаточное число.

В случае приблизительных расчетов считают и = D2/D, т. е. не учитывается скольжение. При этом угол обхвата a.
