Изменение структуры магнитного поля МПФС (магнитной периодической фокусирующей системы) ЛБВ (лампы бегущей волны) посредством внешнего корректирующего воздействия
Магнитный лампа волна токоосаждение При настройке магнитной периодической фокусирующей системы (далее МПФС) для лампы бегущей волны (далее ЛБВ) О-типа используют методику, называемую юстированием. При настройке МПФС ЛБВ юстировка магнитной системы подразумевает контроль прибора на токопрохождение с достижением наиболее оптимального режима работы, когда в качестве контролируемого параметра… Читать ещё >
Изменение структуры магнитного поля МПФС (магнитной периодической фокусирующей системы) ЛБВ (лампы бегущей волны) посредством внешнего корректирующего воздействия (реферат, курсовая, диплом, контрольная)
Аннотация
В статье рассматривается методика настройки конфигурации магнитного поля МПФС ЛБВ, характерной особенностью которой является непосредственно контроль модуля вектора магнитной индукции, вместо токоосаждения. Разработанная методика позволила сократить время и увеличить качество настройки.
Ключевые слова: магнитная периодическая фокусирующая система, лампа бегущей волны, магнитное поле, юстирование, токопрохождение.
магнитный лампа волна токоосаждение При настройке магнитной периодической фокусирующей системы (далее МПФС) для лампы бегущей волны (далее ЛБВ) О-типа используют методику, называемую юстированием. При настройке МПФС ЛБВ юстировка магнитной системы подразумевает контроль прибора на токопрохождение с достижением наиболее оптимального режима работы, когда в качестве контролируемого параметра выступает ток утечки замедляющей системы [1]. Процедура юстирования включает также прикрепление корректирующих магнитов (пиявок), позволяющих изменить внутреннюю конфигурацию магнитного поля, т. е. подстройку магнитной системы осуществляют посредством внешнего магнитного поля.
Повышение эффективности юстировки при настройке ЛБВ на максимальное токопрохождение также добиваются путем поворота магнитов вокруг оси [2]. Так как каждый полупериод фокусирующего магнитного поля формируется несколькими магнитами и наконечниками, нахождение их оптимального азимутального взаиморасположения позволяет уже при прохождении пучком следующего полупериода поля уменьшить отклонение пучка от оси пролетного канала, вызванного поперечными составляющими поля, появляющимся из-за неточностей сборки и неоднородности материала магнитов [3].
Подобная методика позволяет добиться положительных результатов и до сих пор используется при производстве приборов. Однако у описанной процедуры настойки МПФС существует ряд недостатков, главным из которых является незнание конфигурации магнитного поля, т. е. внешнее корректирующее воздействие подбирается экспериментально, что, в свою очередь, ведет к существенным временным затратам.
Настройку магнитной системы выполняют на стадии, когда прибор уже практически собран, поскольку контроль токопрохождения, а значит и параметры фокусировки можно проверить только на этом этапе. Ясно, что данное требование вызвано именно методикой проведения настройки, которая допускает, что в некоторых случаях добиться требуемого распределения магнитного поля вообще не удастся. В таких ситуациях производят замену фокусирующей системы, а значит, над ЛБВ выполняют одну технологическую процедуру дважды. Описанные проблемы вызваны именно тем, что настройку магнитной системы производят фактически «вслепую». Кроме того, регулировщик должен учитывать сторонние параметры, необходимые для выполнения работ, такие как контроль стабильной работы измерительной аппаратуры, блока питания прибора, юстировочного приспособления, термокамеры, что влияет на эффективность настройки [4]. Все это накладывает ограничения на время выполнения операции, увеличивает её стоимость.
Понятно, что при формировании магнитной системы производят предварительный контроль магнитного поля. Подбор магнитов при сборке МПФС выполняют по замерам напряженности магнитного поля, как отдельных магнитов, так и системы в целом. Вместе с тем понятно и то, что конфигурация магнитного поля системы будет серьезно изменена при расколе и сборке магнитов. Вся работа по приведению конфигурации магнитного поля в должное состояние перекладывается на операцию предварительного динамического испытания, при котором и выполняют юстировку прибора [5,6].
Теперь рассмотрим методику, которую можно было бы внедрить для настройки магнитной системы, а также попытаемся доказать её более высокую эффективность. Никто не мешает выполнить «более полную» подстройку магнитной системы на этапе сборки МПФС, когда имеется возможность измерения магнитного поля внутри самой системы. Алгоритм настройки при этом чрезвычайно прост: измерение магнитного поля -> корректировка -> измерение магнитного поля и т. д. Для реализации данного алгоритма необходимо обеспечить два условия: 1) возможность быстрых и наглядных измерений; 2) отслеживание координаты дефекта и результата корректирующего воздействия. Именно второе условие является ключевым, поясним, что оно означает. Если конфигурация магнитного поля не соответствует заявленным требованиям, необходимо установить место дефекта и выполнить подстройку. Координата области подстройки должна быть известна, что позволит сократить время на повторный промер всей магнитной системы, в чем отпадает необходимость по мере настройки [7,8].
Зонд нужно переместить именно в точку, в котором был выявлен дефект, выполнить замер магнитного поля, проконтролировать результат корректирующего воздействия. В случае несоответствия конфигурации магнитного поля заявленным требования требуется выполнить дальнейшую корректировку, в случае успеха, измерение поля на установленной координате более не требуется и можно перейти к следующему участку фокусирующей системы.
Алгоритм описанной методики представлен на рисунке 1. Контроль позиции зонда контролировался при помощи датчиков углового положения. Несмотря на то, что зонд перемещался внутри магнитной системы и определить его позицию визуально не возможно, использование позиционных датчиков позволило однозначно выявить место дефекта.
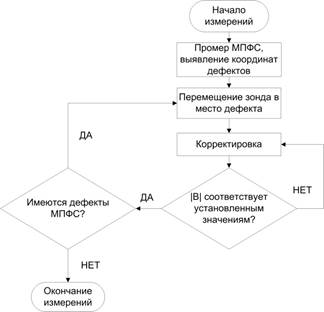
Рис. 1. — Алгоритм корректировки конфигурации магнитного поля МПФС
На рисунке 2 представлены результаты реализации описанной методики при настройке реальной магнитной системы. Графики рисунка 2 показывают зависимость модуля вектора магнитной индукции |B| от угла поворота системы вокруг оси, результаты измерений представлены в полярных координатах. Места наибольшей «неравномерности» магнитного поля образуются в области смены полярности магнитов, где происходит наложение магнитных полей [9]. Существенное влияние в данных областях оказывают сколы магнитов. Измерения были выполнены именно для области перехода [10]. Измерение № 1 представляет начальное состояние магнитной системы. Последующие измерения показывают результаты корректировки.
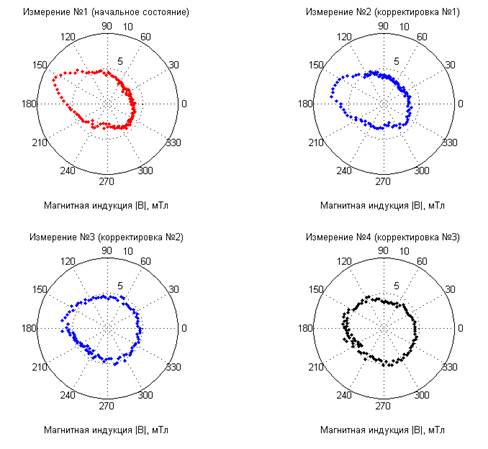
Рис. 2. Результаты корректировки конфигурации магнитного поля МПФС
После наложения первого корректирующего магнита магнитное поле практически не изменило конфигурации, о чем свидетельствует график измерения № 2. Был сделан вывод о необходимости увеличения корректирующего воздействия, добавлением еще нескольких корректирующих магнитов в область неравномерности. Результат корректировки № 2 представлен графиком измерения № 3. Стоит отметить, что кроме того, что уменьшилось отклонение модуля вектора магнитной индукции (при угле поворота системы от 150° до 180°), изменилась конфигурация магнитного поля в целом. Теперь магнитное поле распределилось относительно оси более равномерно. График измерения № 4 показывает результат финальной корректировки, при которой отклонение вектора магнитной индукции не превышает 1 мТл от среднего значения.
Теперь, когда конфигурация распределения магнитного поля удовлетворяет установленным критериям, можно перейти к следующему участку магнитной системы и провести корректировку там, где это необходимо. Операция корректировки значительно упростилась, ведь теперь добавление «пиявок» производится точечно, в места, требующие настройки. Также, следует проконтролировать магнитное поле всей системы после окончания настройки, поскольку изменение магнитного поля последующих магнитов может изменить конфигурацию предыдущих.
Недостатком описанной методики является необходимость дальнейших технологических операций при установке магнитной системы на прибор. Для сохранения настроенной конфигурации магнитного поля требуется разметка магнитной системы с целью последующей сборки в заданной последовательности. Ограничения накладываются и на процедуру юстирования, поскольку крепление корректирующих магнитов непосредственно на места переходов не представляется возможным. Дополнительное внимание также должно быть уделено надежному креплению «пиявок».
Таким образом, описанная методика настройки является одним из возможных вариантов настройки магнитного поля фокусирующей системы. Как было показано, методика имеет очевидные преимущества, а именно время настройки, качество настройки и её наглядность. Знание позиции зонда позволяет выполнять точечное и более эффективное корректирующее воздействие, контролируемым параметром при этом является не ток замедляющей системы, а модуль вектора магнитной индукции.
- 1. Буль О. Б. Методы расчета магнитных систем электрических аппаратов. Программа ANSYS. Пособие для студентов высших учебных заведений. М.: Издательский центр «Академия», 2006. 288 с.
- 2. Арнольд Р. Р. Расчет и проектирование магнитных систем с постоянными магнитами. М.: издательство «Энергия», 1969. 184 c.
- 3. Пятин Ю. М., Альтман А. Б. и др. Постоянные магниты. Справочник. — М.: издательство «Энергия», 1980. 488 с.
- 4. Макс Ж. Методы и техника обработки сигналов при физических измерениях: В 2-х томах. Пер. с франц. М.: Мир, 1983. Т. 2. 312 с.
- 5. Мирошниченко А. Ю., Царев В. А. и др. Моделирование электродинамических параметров многомодового двухзазорного резонатора для миниатюрных многолучевых приборов клистронного типа // Инженерный вестник Дона, 2013, № 3 URL: ivdon.ru/ru/magazine/archive/n3y2013/1902.
- 6. Пустовалов А. И. Двухканальное приемное устройство СВЧ диапазона // Инженерный вестник Дона, 2010, № 2 URL: ivdon.ru/ru/magazine/archive/n2y2010/195.
- 7. Proakis John G. Digital Signal Processing. Prentice-hall international Inc., 1996. — 1032 p.
- 8. Oppenheim, Alan V. Discrete-Time signal processing. — 2nd ed. Prentice-hall international Inc., 1998. 870 p.
- 9. Кетков Ю. Л. MATLAB 7: программирование, численные методы. — Спб.: БХВ-Петербург, 2005. 752 с.
- 10. Егоренков Д. Л. Основы математического моделирования. Построение и анализ моделей с примерами на языке MATLAB. — СПб.: БГТУ, 1994, 190 с.
References.
- 1. Bul' O.B. Metody rascheta magnitnyh sistem jelektricheskih apparatov. Programma ANSYS [Methods of computing magnetic systems with permanent magnets. ANSYS program]. Posobie dlja studentov vysshih uchebnyh zavedenij. — M.: Izdatel’skij centr «Akademija», 2006. 288 p.
- 2. Arnol’d R.R. Raschet i proektirovanie magnitnyh sistem s postojannymi magnitami [Calculation and design of magnetic systems with permanent magnets]. — M.: izdatel’stvo «Jenergija», 1969. 184p.
- 3. Pjatin Ju. M., Al’tman A.B. i dr. Postojannye magnity. Spravochnik [Permanent magnets. Reference book]. M.: izdatel’stvo «Jenergija», 1980. 488 p.
- 4. Maks Zh. Metody i tehnika obrabotki signalov pri fizicheskih izmerenijah [Methods and technique of the signal computing in physical measurements]: V 2-h tomah. Per. s franc. M.: Mir, 1983. T. 2. 312 p.
- 5. Miroshnichenko A.Ju., Carev V.A. Inћenernyj vestnik Dona (Rus), 2013, № 3 URL: ivdon.ru/ru/magazine/archive/n3y2013/1902.
- 6. Pustovalov A.I. Inћenernyj vestnik Dona (Rus), 2010, № 2 URL: ivdon.ru/ru/magazine/archive/n2y2010/195.
- 7. Proakis John G. Digital Signal Processing. Prentice-hall international Inc., 1996. 1032 p.
- 8. Oppenheim, Alan V. Discrete-Time signal processing. — 2nd ed. Prentice-hall international Inc., 1998. 870 p.
- 9. Ketkov Ju.L. MATLAB 7: programmirovanie, chislennye metody [MATLAB 7: programming, numerical methods]. Spb.: BHV-Peterburg, 2005. 752 p.
- 10. Egorenkov D.L. Osnovy matematicheskogo modelirovanija. Postroenie i analiz modelej s primerami na jazyke MATLAB [Bases of mathematical modeling. Development and analysis of the models with examples on the MATLAB programming language]. SPb.: BGTU, 1994. 190 p.