Солнечные датчики.
Солнечные датчики
При выделении и обработке кластеров выполняется группировка элементов ПЗС-линейки по кластерам, которые определяются как последовательность элементов со значением сигнала выше уровня порога. Для каждого кластера вычисляются: координата энергетического центра, ширина и максимальное значение сигнала в кластере, коэффициент асимметрии. Отождествление кластеров выполняется с целью установить… Читать ещё >
Солнечные датчики. Солнечные датчики (реферат, курсовая, диплом, контрольная)
Солнечные датчики
Солнце — один из наиболее удобных астрономических ориентиров. Характеристики Солнца позволяют использовать наиболее простые схемотехнические и программно-алгоритмические решения при построении приборов ориентации космических аппаратов по Солнцу.
История космического приборостроения и, в частности, производства приборов ориентации по Солнцу ведет свое начало с самых истоков освоения космоса. Первые упоминания о приборах ориентации по Солнцу в российской истории космонавтики относятся к первым запускам искусственных спутников Земли.
В настоящее время на российском и зарубежном рынках космического приборостроения представлен широкий спектр приборов ориентации по Солнцу.
При построении этих приборов учитываются задачи, решаемые прибором на борту, требования, предъявляемые к прибору, а также, наличие или возможность разработки элементной базы для прибора, его отдельных узлов. Каждое техническое решение в реализации солнечных датчиков имеет преимущества и недостатки. Рассмотрены типичные функциональные схемы и принципы работы основных типов приборов.
Разнообразие технических решений позволяет классифицировать существующие солнечные датчики как по конструктивным решениям, так и по техническим характеристикам.
Основные рубрики классификации по конструктивным решениям:
- 1. По оптической схеме;
- 2. По подвижности мгновенного углового поля;
- 3. По виду выходных сигналов: релейные, позиционно-импульсные, цифровые и др.
Основные рубрики классификации солнечных датчиков по техническим характеристикам:
- 1. По точности:
- * грубые, с погрешностью более 5°;
- * умеренной точности, с погрешностью от 0,5 до 5°;
- * точные, с погрешностью менее 30 угл.мин.
- 2. По угловому полю зрения: менее полусферического, полусферические, сферические.
Приведена подробная классификация существующих солнечных датчиков.
солнце астроприбор алгоритм.
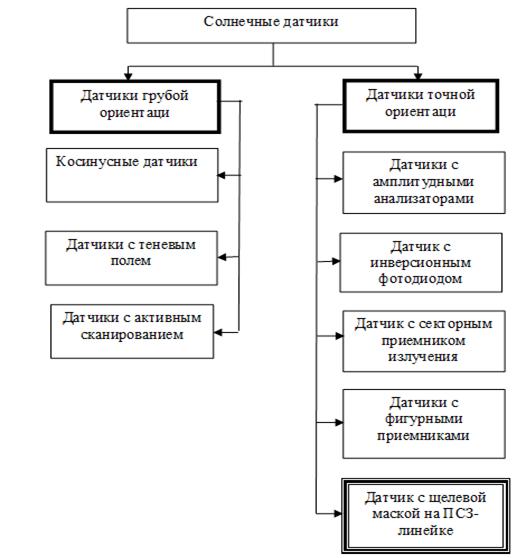
Рис. 1 Классификация солнечных датчиков для определения ориентации КА
Датчик с щелевой маской на ПЗС-линейке разрабатывается в ИКИ РАН. Он предназначен для определения направления на Солнце и состоит из щелевой маски с тремя прямолинейными щелями и ПЗС-линейки. Крайние щели образуют с центральной щелью угол в 45. ПЗС-линейка используется для регистрации прошедшего через такую маску солнечного света. По положению на ПЗС-линейке освещенных участков бортовой вычислительной системой КА определяется направление на Солнце.
Звездный прибор с ПЗС-матрицей и сигнальным процессором также разрабатывается в ИКИ РАН. Он предназначен для прецизионных определений инерциальной ориентации космического аппарата и представляет собой телевизионную камеру с процессором.
В четвертом разделе выполнен анализ помеховых факторов, влияющих на работу астроприборов:
Высокая угловая скорость вращения космического аппарата.
Протонные вспышки на Солнце.
Световые помехи в поле зрения астроприбора.
Естественные источники излучения в поле зрения астроприбора.
Элементы конструкции КА в поле зрения астроприбора.
Изменение яркости источника излучения.
Также сформулированы задачи математического обеспечения, решаемые в работе:
Повышение быстродействия определения ориентации Функционирование в условиях более высокой угловой скорости движения КА.
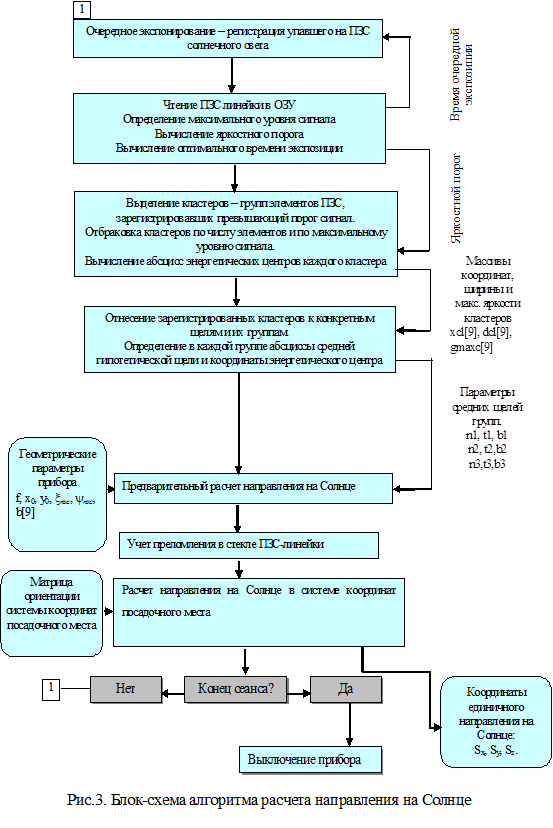
Повышение помехозащищенности по отношению к световым помехам и протонному излучению Представлена функциональная схема (рис.2) оптического солнечного датчика и описана общая структура алгоритма расчета направления на Солнце (см. рис.3).
Обработка сигналов с ПЗС линейки и определение направления на Солнце включает следующие этапы:
Экспонирование и первичная обработка изображений ПЗС-линейки.
Выделение кластеров и их обработка.
Отождествление кластеров.
Расчет направления на Солнце.
Экспонирование и первичная обработка сигналов с ПЗС-линейки выполняется с целью получения цифровых изображений щелей кодирующей маски, пропорциональных яркости, создаваемой солнечным излучением видимого диапазона. На этапе первичной обработки определяются оптимальное время накопления, уровень пороговой отсечки, наличие видеосигнала.
При выделении и обработке кластеров выполняется группировка элементов ПЗС-линейки по кластерам, которые определяются как последовательность элементов со значением сигнала выше уровня порога. Для каждого кластера вычисляются: координата энергетического центра, ширина и максимальное значение сигнала в кластере, коэффициент асимметрии.
Отождествление кластеров выполняется с целью установить соответствие между координатами энергетических центров кластеров и порядковым номерами щелей на кодирующей маске. Оно заключается в поиске групп кластеров, идентификации кластеров в каждой группе, идентификации групп, отбраковки кластеров и вычислении координат центров групп.
Расчет направления на Солнце основан на математическом описании хода лучей в модели двухщелевого датчика. При вычислениях учитывается взаимное положение кодирующей маски и ПЗС-линейки, а также преломление световых лучей в стекле ПЗС-линейки. Затем проводится вычисление направления в системе координат посадочного места.
Верификацией математического обеспечения является проверка выполнения поставленных задач в процессе обработки результатов эксперимента.
Сравнение результатов измерений ОСД с теоретическими значениями позволяет построить график изменения ошибок во время натурных испытаний и оценить их статистические характеристики.
Верификация математического обеспечения ОСД проводилась в ходе натурных испытаний в соответствии с методикой натурных испытаний, которая позволяет оценить работоспособность ОСД при неподвижном положении прибора. В итоге проведения натурных испытаний ОСД зафиксированы:
направляющие косинусы вектора Солнца, измеренные ОСД;
время привязки измерений.
Измерения проводились при положениях прибора, позволяющих исследовать его работу при ориентации по Солнцу, как в центре, так и на краях поля зрения.
Для оценки точности работы прибора и верификации его программного обеспечения были рассчитаны ошибки определения относительных и взаимных углов направления на Солнце, а также их среднеквадратическое отклонение и среднее значение.
Ошибка определения относительного угла между текущим направлением на Солнце и начальным направлением определялась по следующей формуле:
(4).
где — интервал времени от начала измерений до текущего момента времени,.
S0 — начальное значение направляющих косинусов вектора Солнца,.
Si — текущее значение направляющих косинусов вектора Солнца в момент времени ti.
Ошибка вычисления взаимного угла между предыдущим и текущим направлениями на Солнце (i) рассчитывалась по следующей формуле.

(5).
где: — интервал времени между соседними измерениями;
Si-1 — предыдущее значение направляющих косинусов вектора Солнца;
Si — текущее значение направляющих косинусов вектора Солнца.
Заключительным этапом обработки является построение графиков, отображающих: траекторию движения Солнца в поле зрения ОСД;
изменение ошибок относительного угла во времени;
изменение ошибок взаимного угла во времени.
Ниже приведены графики, построенные при движении Солнца в центре поля зрения (рис.7) в течени часа.
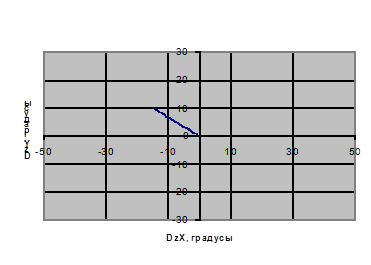
Рис. 7 Траектория движения Солнца в центре поля зрения прибора
Этой траектории соответствует график изменения относительной ошибки во времени (рис. 8).
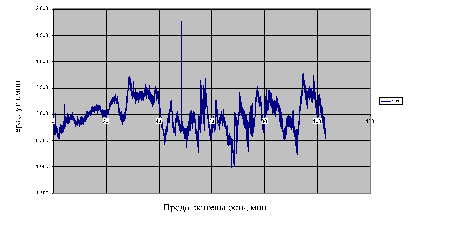
Рис. 8 График изменения относительной ошибки во времени
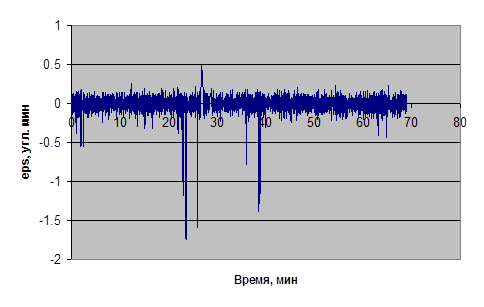
Рис. 9 График изменения взаимной ошибки во времени
Как видно на графике, динамика изменения ошибки имеет ярко выраженные высокочастотную и низкочастотную составляющие. Наличие ВЧ-составляющей, по всей видимости, обусловлено шумами электронных компонентов, ПЗС-линейки, АЦП и ВИП ОСД. Наличие НЧ-составляющей обусловлено скорее всего неточностью изготовления оптического элемента прибора, а также неравномерностью коэффициента пропускания фильтра и неравномерностью чувствительности ПЗС-линейки. Среднеквадратическая ошибка определения относительного угла составляет 0,274 угл. мин.
Динамика ошибки определения взаимных углов в центре поля зрения (рис.9) содержит только ВЧ-составляющую.
Среднеквадратическая ошибка определения взаимного угла составляет 0,118 угловых минут. Единичные выбросы ошибок обусловлены влиянием облачности в процессе натурных испытаний прибора.
По результатам натурных испытаний можно сделать вывод о работоспособности прибора. Поставленные задачи по помехозащищенности, быстродействию (частота опроса составляет 0,2с), автоматическому подбору времени накопления и достижения высокой точности (< 1 угл.мин.) определения направления на Солнце успешно решены.
ИКИ РАН — институт космических исследований Российской академии наук ПЗС — прибор с зарядовой связью АЦП — аналого цифровой передавач.
- 1. Книжников Ю. Ф., Никитин А. В. «Компьтерный способ картографического отображения скоростного поля горного ледника"//Доклады 1-й всероссийской научной конференции по картографии, Москва, 7−10 октября 1997, С.465−468
- 2. Berger M., Kaufman H., Ziman Y., Kuzmin A., Nikitin A., Polyanski I., Vasileisky A., Oertel D., Zhukov B. Entwicklung neuer Bildregistrieriungsverfahren zur Fusion von Fernerkundungsdatensatzen mit unterschiedlichen mit unterschiedlichen geometrischen und spektralen Auflosungen.-1998.-Endbericht zum Vorhaben: BMBF 93F20GUS; GeoForschungsZentrumPotsdam: GFZ-STR 98/02, 52s.
- 3. Poskonin Yu. A., Revzina N. B., Nikitin A. V., Belyavskiy E. P., Elchin. A. P. Star Sensor Thermal Mode In Flight. //Proceeding of the 30th International Conference on Environmental Systems Toulouse, France July 10−13, 2000.
- 4. Гельман Р. Н., Никитин А. В., Никитин М. Ю. «Об учете дисторсии при обработке видеоизображений». //Геодезия и картография, 2000 г. № 11. С.19−22
- 5. Аванесов Г. А., Никитин А. В., Форш А. А «Оптический солнечный датчик». //Известия ВУЗов. Приборостроение, 2003. Т.46.№ 4. С.70−73