Модификации стоимостных функций
Например, для обеспечения энергосбережения в стоимостную функцию может быть введен интеграл от квадрата управляющего воздействия, которое представляет обобщенную энергию управления. Соответствующая структура показана на рис. 9.2. Фактически роль анализатора достижения цели играют два блока: анализатор ошибки управления и анализатор энергетических затрат. Сигналы с выходов этих блоков поступают… Читать ещё >
Модификации стоимостных функций (реферат, курсовая, диплом, контрольная)
Обеспечение энергосбережения
Как сказано в гл. 5, для оптимизации системы с обратной связью может быть использована структура, показанная на рис. 5.6. Эту структуру обобщенно и упрощенно можно представить структурой, изображенной на рис. 9.1. Здесь вычислитель стоимостной функции обобщенно можно назвать «анализатор сигналов».
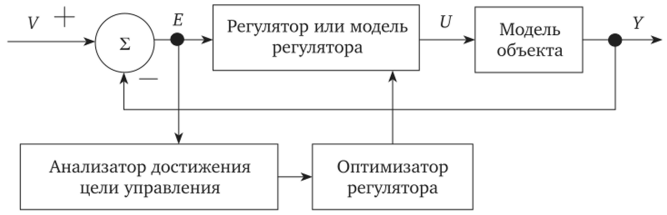
Рис. 9.1. Обобщенная и упрощенная структура для оптимизации системы.
В данном случае анализатор достижения цели управления соединен только с выходом вычитателя, осуществляющего вычисление ошибки управления. В случае применения составной стоимостной функции могут использоваться дополнительные входы этого анализатора, подключенные к другим точкам в модели системы.
Например, для обеспечения энергосбережения в стоимостную функцию может быть введен интеграл от квадрата управляющего воздействия, которое представляет обобщенную энергию управления. Соответствующая структура показана на рис. 9.2 [66]. Фактически роль анализатора достижения цели играют два блока: анализатор ошибки управления и анализатор энергетических затрат. Сигналы с выходов этих блоков поступают на оптимизатор, где суммируются с весовыми коэффициентами. Сумматор можно выделить из структуры оптимизатора и показать в явном виде, что даст формально новую структуру, но суть ее останется такой же.
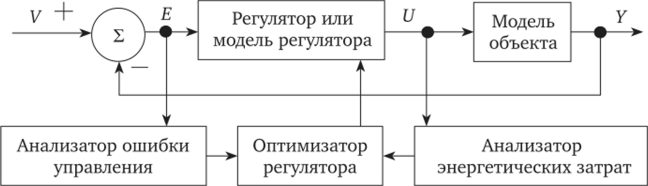
Рис. 9.2. Обобщенная и упрощенная структура для оптимизации системы.
Данная структура модели для оптимизации системы с обратной связью работает следующим образом. Программа для моделирования осуществляет многократное моделирование действия указанной структуры. При этом на вход структуры, которым является положительный вход вычитателя, подается входной сигнал V в виде, например, ступенчатого воздействия. На отрицательный вход этого вычитателя поступает выходной сигнал модели объекта Y, который также является выходным сигналом структуры. Вычитатель вычисляет разницу этих сигналов, называемую ошибкой Е. Ошибка преобразуется регулятором в сигнал управления U, который поступает на вход модели объекта. Если ошибка положительна, сигнал управления воздействует на модель объекта так, чтобы выходной сигнал модели объекта увеличивался, а ошибка за счет этого уменьшалась; если же ошибка отрицательна, то сигнал управления воздействует на модель объекта так, чтобы выходной сигнал модели объекта уменьшался, а ошибка за счет этого увеличивалась. Если ошибка равна нулю, сигнал управления воздействует на модель объекта так, чтобы выходной сигнал модели объекта не изменялся, а ошибка оставалась равной нулю. Оптимизатор регулятора формирует по заданному алгоритму стартовые значения коэффициентов регулятора, анализирует выходные сигналы анализатора достижения цели управления и анализатора энергетических затрат, вычисляет стоимостную функцию и формирует на этой основе новые значения коэффициентов регулятора. Используя при этом любой из методов многомерной оптимизации, например метод Хука — Дживса, оптимизатор осуществляет поиск таких значений коэффициентов регулятора, которые обеспечивают минимальное значение стоимостной функции. Эти коэффициенты являются результатом применения структуры модели для оптимизации системы с обратной связью, они извлекаются из памяти оптимизатора и применяются при изготовлении системы с обратной связью. Если модель объекта определена достаточно точно, то система работает с такими же показателями качества и точности, которые достигнуты при моделировании с использованием описанной структуры модели для оптимизации системы с обратной связью. Таким образом, поставленная задача оказывается решенной. Если же модель объекта определена лишь в ограниченной области частот, может быть использован элемент с ограниченным быстродействием, например звено запаздывания, как предложено в гл. 6 (см. рис. 6.21).
Энергосберегающие регуляторы особенно эффективно позволяют сберегать затрату энергии на управление в том случае, если в модели объекта содержится интегратор. Действительно, в этом случае энергия расходуется только в процессе перевода объекта из одного состояния в другое, а пребывание объекта в каком-либо равновесном состоянии не требует расхода энергии управления. Примером таких систем является переход спутника из одной стационарной орбиты в другую и т. п.Пример 9.1. Рассмотрим объект, передаточная функция которого содержит объект второго порядка, звено запаздывания и интегратор:

Осуществим оптимизацию ПИ-регулятора, так как интегратор содержится в объекте, и в регуляторе он не требуется. Структурная схема объекта при моделировании в программе VisSim показана на рис. 9.3. Структурная схема всей системы изображена на рис. 9.4. На рис. 9.5 представлен полученный вид переходного процесса, а на рис. 9.6 дан график расхода ресурса управления, который представляет собой квадрат управляющего сигнала H (t).
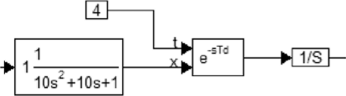
Рис. 9.3. Структура объекта для моделирования по примеру 9.1.
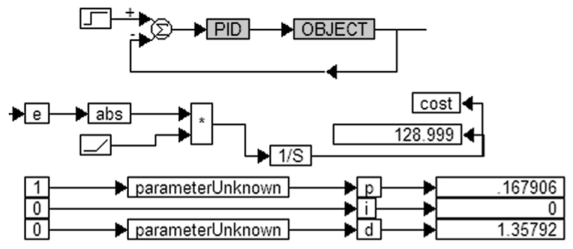
Рис. 9.4. Структура всей системы по примеру 9.1.
Итоговый расход ресурса на управление составляет приблизительно 0,225 ед. Для проектирования энергосберегающего регулятора введем в стоимостную функцию интеграл от квадрата управляющего сигнала с весовым коэффициентом. Моделирование показало, что весовой коэффициент должен быть не менее 100, чтобы энергосбережение работало эффективно. Нами использован весовой коэффициент 500. Структурная схема показана на рис. 9.7. Полученный переходный процесс изображен на рис. 9.8, а график изменения расхода ресурса приведен на рис. 9.9. Видно, что переходный процесс не только не ухудшился, но даже улучшился, а именно устранено перерегулирование и длительность процесса сократилась от 50 до 30 с. Расход ресурса стал приблизительно 0,14 ед., т. е. в 1,6 раза меньше.

Рис. 9.5. Переходный процесс в системе по примеру 9.1.
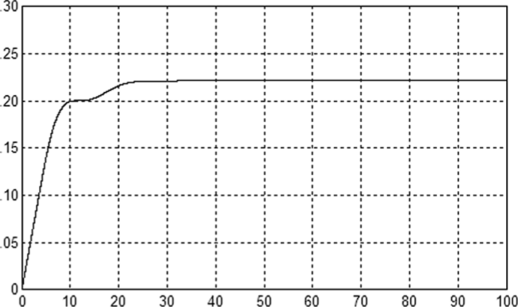
Рис. 9.6. График изменения расхода ресурса управления по примеру 9.1.
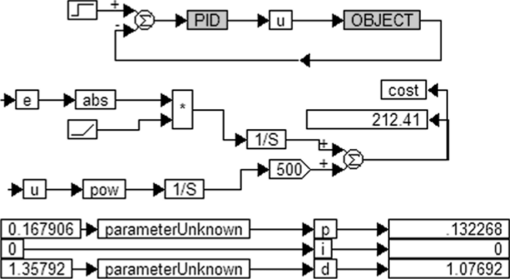
Рис. 9.7. Структура для оптимизации энергосберегающего регулятора по примеру 9.1.
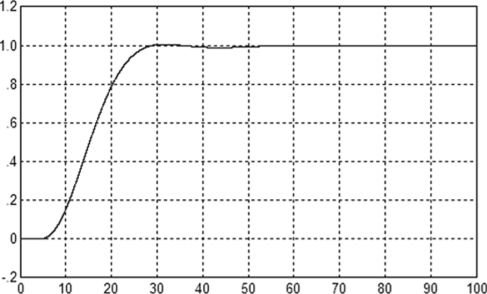
Рис. 9.8. Переходный процесс в энергосберегающей системе по примеру 9.1.

Рис. 9.9. График изменения расхода ресурса управления по примеру 9.1.